

КЛ по Информатике-2008-часть2_укр
.pdfЛекція № 2.(І-Д-8).
Методи розв’язання систем лінійних алгебраїчних рівнянь та методи обробки даних в табличному процесорі MS Excel
І-Д-8. Ключові слова і поняття: алгебраїчне рівняння (2.1), трансцендентне рівняння (2.2), лінійне рівняння (2.3), система рівнянь (2.4), точні (прямі) методи розв’язання систем лінійних рівнянь (2.5), ітераційні (наближені) методи розв’язання систем лінійних рівнянь (2.6), К.Ф. Гаус (2.7), еквівалентна система (2.8), верхня трикутна матриця (2.9), перестановка (2.10), масштабування (2.11), заміщення (2.12), розширена матриця (2.13), головний елемент (2.14), ітерація (2.15), теорема про достатню умову (2.16), інтерполяція (2.17), екстраполяція (2.18), Ж.Л. Лагранж (2.19), лінійна інтерполяція (2.20), квадратична інтерполяція (2.21), норма (2.22), емпірична формула (2.23), метод найменших квадратів (2.24), апроксимація (2.25), коефіцієнт лінійної кореляції (2.26).
2.1. Вхідна інформація для самоперевірки
Приступаючи до вивчення даної теми, ВАМ необхідно відновити в пам’яті знання з минулих періодів навчання:
-з курсу «Інформатика»: електроні таблиці, формула.
-з курсу «Вища математика»: рівняння, система рівнянь, багаточлен.
2.2.Зміст теми
§1. Методи розв’язання систем лінійних алгебраїчних рівнянь
1.1.Системи лінійних рівнянь
1.2.Концепція методів
1.3.Метод Гауса та його основні положення
1.3.1.Алгоритм зворотної підстановки
1.3.2.Метод виключення Гауса і вибір головного елемента
1.4.Схема єдиного ділення і реалізація метода Гауса в MS Excel
1.5.Ітераційні методи розв’язання систем лінійних рівнянь
1.6.Метод ітерацій
1.7.Приведення системи до вигляду, зручного для ітерацій
1.8.Метод Зейделя
1.9.Реалізація метода Зейделя в MS Excel
§2. Методи обробки даних: інтерполяція
2.1.Постановка задачі
2.2.Інтерполяційний поліном Лагранжа
2.3.Лінійна інтерполяція
2.4.Квадратична інтерполяція
2.5.Обчислення інтерполяційного багаточлена Лагранжа в проміжних точках
2.6.Реалізація метода інтерполяції в MS Excel
§3. Методи обробки даних: метод найменших квадратів
3.1.Постановка задачі
3.2.Метод найменших квадратів
3.3.Лінійна апроксимація
3.4.Квадратична апроксимація
3.5.Реалізація метода найменших квадратів в MS Excel
40

§ 1. Методи розв’язання систем лінійних алгебраїчних рівнянь
1.1. Системи лінійних рівнянь
Інженерові часто доводиться вирішувати алгебраїчні рівняння (2.1) і трансцендентні рівняння (2.2), що може являти собою самостійну задачу або бути частиною більш складних задач. В обох випадках практична цінність методу значною мірою визначається швидкістю та ефективністю отриманого рішення.
Алгебраїчне рівняння (2.1)
Рівняння називають алгебраїчним, якщо кожна з функцій, що входять до його складу є алгебраїчною (раціональною або ірраціональною). Одна з функцій може бути постійною ве-
личиною. Наприклад, x2 = 2
Трансцендентне рівняння (2.2)
Рівняння F (x)= f (x) називають трансцендентним, якщо хоча б одна з функцій F (x) або f (x) не є алгебраїчною. Наприклад, 3x = 2 + 4x−2 ; x cos x = sin x
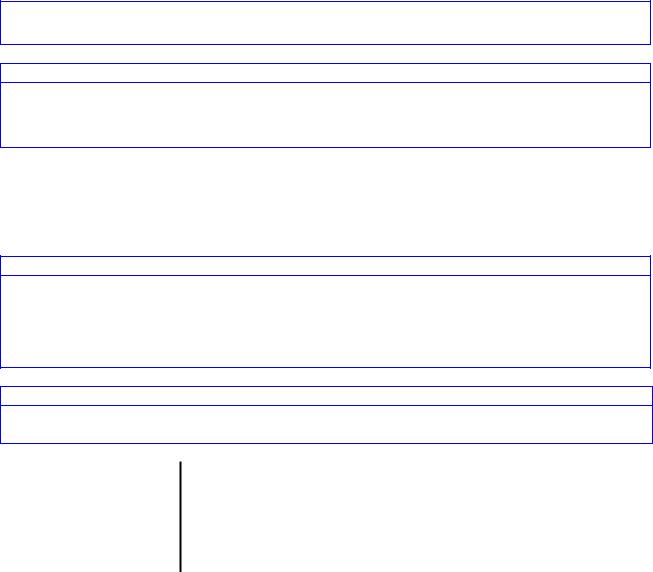
Вибір відповідного методу для рішення рівнянь залежить від характеру розглянутої задачі. Задачі, що зводяться до рішення алгебраїчних і трансцендентних рівнянь, можна класифікувати по числу рівнянь і залежно від пропонованого характеру і числа рішень (Рис. 2.1).
Алгебраїчні і трансцендентні рівняння
Одно рівняння |
Система рівнянь |
Лінійне рівняння |
|
Лінійна |
Нелінійна |
(одне рішення) |
Нелінійне |
(одне рішення) |
(декілька рішень) |
Алгебраїчне |
Трансцендентне |
(n рішень) |
(невизначене число |
|
рішень) |
Рис. 2.1 Класифікація рівнянь і систем рівнянь залежно від числа рішень
Одне рівняння будемо називати лінійним рівнянням (2.3), алгебраїчним або транс-
цендентним залежно від того, чи має воно одне рішення, n рішень або невизначене число рішень. Систему рівнянь (2.4) будемо називати лінійною або нелінійної залежно від математичної природи рівнянь, що входять до неї.
Достатньо часто виникає потреба в рішенні інженерних задач, що зводяться до розв’язання системи лінійних рівнянь.
Лінійне рівняння (2.3)
Рівняння, що в канонічній формі можна записати у вигляді: a x + b = 0 . Завжди має одне
41
дійсне рішення x = − ab
Система рівнянь (2.4)
Система n рівнянь – це сукупність n рівностей, що справедливі лише для визначених груп (x1 , y1 ,...z1 ; x2 , y2 ,...z2 ; ...)значень невідомих (x, y,...z); кожна така група (сукупність) називається рішенням цієї системи
1.2. Концепція методів
Способи розв’язання систем лінійних рівнянь можна поділити на дві основні групи:
точні (прямі) методи розв’язання систем лінійних рівнянь (2.5), ітераційні (наближені) методи розв’язання систем лінійних рівнянь (2.6).
Точні (прямі) методи розв’язання систем лінійних рівнянь (2.5)
Представляють собою кінцеві алгоритми для обчислення коренів системи (рішення систем за допомогою зворотної матриці, метод Крамера, метод Гауса та ін.), тобто при використанні таких методів за кінцеве число дій одержуємо точне рішення системи. Точне рішення виходить у тому випадку, якщо обчислення проводити без округлень, тобто поняття точне ставиться до алгоритму рішення.
Ітераційні (наближені) методи розв’язання систем лінійних рівнянь (2.6)
Ці методи дозволяють одержати рішення системи із заданою точністю шляхом збіжних ітераційних процесів (метод ітерації, метод Зейделя та ін.)
ЗВЕРНІТЬ УВАГУ! NB !
Внаслідок неминучих округлень результати навіть точних методів є наближеними. При використанні ітераційних методів, крім того, додається погрішність методу.
Ефективне застосування ітераційних методів істотно залежить від вдалого вибору початкового наближення і швидкості збіжності процесу.
У загальному виді лінійна система рівнянь записується в такий спосіб:
a |
11 |
x |
1 |
+ a |
12 |
x |
2 |
+ a |
13 |
x |
3 |
+ ...+ a |
1n |
x |
n |
= b |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|||||||||||||||
a21 |
x1 + a22 x2 |
+ a23 x3 + ...+ a2n xn |
= b2 |
, |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
.................................................................... |
|
||||||||||||||||||||||||||||||
a |
n1 |
x |
1 |
+ a |
n2 |
x |
2 |
+ a |
n3 |
x |
3 |
|
+ ...+ a |
nn |
x |
n |
= b |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
||||||||||
або частіше в матричному виді: a x = B , де а – квадратна матриця розміром n x n, B і |
|||||||||||||||||||||||||||||||
x – вектори розміром n (n – розмірність системи). |
|
||||||||||||||||||||||||||||||
|
|
1.3. Метод Гауса та його основні положення |
|||||||||||||||||||||||||||||
Розглянемо систему n лінійних алгебраїчних рівнянь відносно n невідомих х1, х2, …, |
|||||||||||||||||||||||||||||||
хn: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
11 |
x |
1 |
+ a |
12 |
x |
2 |
+ ...+ a |
1n |
x |
n |
= b |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||||||||
a21 |
x1 + a22 x2 |
+ ...+ a2n xn |
= b2 |
|
|
|
|
|
|
|
(2.1) |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
................................................ |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
a |
n1 |
x |
1 |
+ a |
n2 |
x |
2 |
+ ...+ a |
nn |
x |
n |
= b |
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
||||||||
42

Метод К.Ф. Гауса (2.7), його ще називають методом Гаусових виключень (методом послідовних виключень), полягає в тому, що систему (2.1) приводять послідовним виклю-
ченням невідомих до еквівалентної системи (2.8) з верхньою трикутною матрицею (2.9):
К.Ф. Гаус (2.7)
ГАУС Карл Фрідріх (1777-1855), німецький математик, іноземний член-кореспондент (1802) і іноземний почесний член (1824) Петербурзької АН. Для творчості Гауса характерний органічний зв’язок між теоретичною і прикладною математикою, широта проблематики. Праці Гауса зробили великий вплив на розвиток алгебри (доведення основної теореми алгебри), теорії чисел (квадратичні вирахування), диференціальної геометрії (внутрішня геометрія поверхонь), математичної фізики (принцип Гауса), теорії електрики і магнетизму, геодезії (розробка методу найменших квадратів) і багатьох розділів астрономії.
Еквівалентна система (2.8)
Говорять, що дві лінійні системи розміру N x N еквівалентні, якщо вони мають ту саму множину рішень. Теореми з лінійної алгебри показують, що застосування певних перетворень до заданої системи не змінює множини рішень.
Верхня трикутна матриця(2.9)
Матриця A = aij розміру N x N називається верхньою трикутною в тому випадку, якщо
елементи aij = 0 |
, як тільки i > j . Матриця A = |
|
розміру N x N називається нижньою |
aij |
|||
трикутною в тому випадку, якщо елементи aij = 0 , як тільки i < j . |
|||
x1 +α12 x2 + ...+α1n xn = β1 |
|
|
|
|
x2 + ...+α2n xn = β2 |
|
|
|
, |
(2.2) |
|
|
.................................. |
||
|
|
|
|
|
xn = βn |
|
|
|
|
|
|
рішення якої знаходять за рекурентними формулами (формулами впорядкування):
n |
|
xn = βn , xi = βi − ∑αi , j x j , (i = n − 1, n − 2,...,1) |
(2.3) |
j=i+1
У матричному записі це означає, що спочатку (прямій хід методу Гауса) елементарними операціями над рядками приводять розширену матрицю системи до східчастого виду:
a11
A1 = a21Lan1
a12 L a1n
a22 L a2n
L L L
an2 L ann
b1 |
|
1 |
α12 |
L α1n |
|
b |
|
0 |
1 |
L α |
|
2 |
|
|
|
|
2n |
L |
|
|
|
|
|
L L L L |
|||||
b |
|
|
0 |
L 1 |
|
|
0 |
||||
n |
|
|
|
|
|
β1
β2 =Â1,
L
βn
а потім (зворотний хід методу Гауса) цю східчасту матрицю перетворюють таким чином, щоб у перших n стовпцях вийшла одинична матриця:
1 |
0 |
L 0 |
x1 |
|
|
|
1 |
L 0 |
x2 |
|
|
0 |
|
||||
L L L L L |
|
. |
|||
|
0 |
L 1 |
x |
|
|
0 |
|
|
|||
|
|
|
|
n |
|
Останній, (n+1) стовбець цієї матриці містить рішення системи (2.1).
43

1.3.1. Алгоритм зворотної підстановки
Розглянемо алгоритм зворотної підстановки, що є корисним для розв’язання систем лінійних рівнянь, що мають верхню трикутну матрицю коефіцієнтів.
Якщо A - верхня трикутна матриця, то говорять, що A x = B - це верхня трикутна система рівнянь, і вона має вигляд:
a11 x1 + a12 x2 + a13 x3 |
|
|
a22 x2 + a23 x3 |
|
|
|
a33 x3 |
|
|
|
|
+K+ a1N −1 xN −1 + a1 N xN = b1
+K+ a2 N −1 xN −1 + a2 N xN = b2
+K+ a3 N −1 xN −1 + a3 N xN |
= b3 |
(2.4) |
M |
M |
|
aN −1N −1 xN −1 + aN −1N xN = bN −1 aNN xN = bN
Теорема про зворотну підстановку. Припустимо, що A x = B - верхня трикутна си-
стема рівнянь, задана у вигляді (2.4). Якщо |
|
||||||||
|
akk |
≠ 0 для k = 1, 2,K, N , |
(2.5) |
||||||
те існує єдине рішення системи (2.4) |
|
||||||||
Доказ. |
|
|
|
|
|
|
|
|
|
Рішення можна легко знайти. Останнє рівняння включає тільки один невідоме xN , |
|||||||||
тому обчислюємо його першим: |
bN |
|
|
|
|
||||
|
|
xN = |
. |
|
|
(2.6) |
|||
|
|
|
|
||||||
|
|
|
|
aNN |
|
||||
Відоме xN можна використати в наступному рівнянні: |
|
||||||||
|
|
xN −1 = |
bN −1 −aN −1N xN |
. |
|
(2.7) |
|||
|
|
|
|
||||||
Після цього відомі xN |
|
|
|
|
aN −1N −1 |
|
|||
й xN −1 використаємо для знаходження xN −2 : |
|
||||||||
|
xN −2 = |
bN −2 − aN −2 N −1 xN −1 − aN −2 N xN |
. |
(2.8) |
|||||
|
|
||||||||
|
|
|
|
|
|
aN −2 N −2 |
|
||
Коли значення xN , xN −1 ,K, xk+1 відомі, можна записати загальну формулу: |
|||||||||
|
|
N |
|
|
|
|
|
|
|
|
bk |
− ∑ akj |
x j |
|
|||||
xk = |
|
j=k+1 |
|
|
для k = N − 1, N − 2,K, 1 |
(2.9) |
|||
|
akk |
|
|
||||||
|
|
|
|
|
|
|
|
||
Легко бачити, що рішення єдине.
1.3.2. Метод виключення Гауса і вибір головного елемента
Розглянемо схему рішення системи A x = B N рівнянь із N невідомими. Метою роботи є побудова еквівалентної верхньої трикутної системи α x = β , яку можна вирішити
методом зворотної підстановки.
Наступні операції, застосовані до лінійної системи, приводять до еквівалентної систе-
ми: перестановка (2.10), масштабування (2.11), заміщення (2.12).
Перестановка (2.10)
При перестановці порядок двох рівнянь може бути змінений
44
Масштабування (2.11)
При масштабування дозволяється множення рівняння на не рівну нулю константу
Заміщення (2.12)
Рівняння можна замінити сумою цього ж рівняння й будь-якого іншого рівняння, помноженого на не рівну нулю константу
Найчастіше використають заміщення, щоб замінити рівняння різницею між цим рівнянням і кратним іншому рівнянню. Розглянемо це на прикладі
Приклад. Знайдемо параболу y = A + B x + C x2 , що проходить через три крапки:
(1; 1), (2; -1), (3; 1).
Для кожної крапки знайдемо рівняння що пов’язує значення
зультатом є система лінійних рівнянь: |
( 1;1 ) |
|
A + B + C = 1 |
||
|
B + 4 C = −1 |
( 2;−1 ) |
A + 2 |
||
|
B + 9 C = 1 |
( 3;1 ) |
A + 3 |
||
x із значенням y . Ре-
(2.10)
Якщо відняти перше рівняння із другого і третього, то виключається змінна А. Це застосування перетворення заміщення. У результаті одержуємо еквівалентну лінійну систему.
A + B + C = 1 |
|
|
|
B + 3 C = −2 |
(2.11) |
|
||
|
2 B + 8 C = 0 |
|
|
|
|
Змінна В виключається із третього рівняння (2.11) шляхом дворазового вирахування з нього другого рівняння. Виходить еквівалентна верхня трикутна система рівнянь.
A |
+ B + C = 1 |
|
|
B + 3 C = −2 |
(2.12) |
|
||
|
2 C = 4 |
|
|
|
|
Скористаємося алгоритмом |
зворотної підстановки для знаходження коефіцієнтів: |
|
C = 4 / 2 = 2 ; B = −2 − 3 2 = −8 ; |
A = 1 −( −8 ) − 2 =7 . Отже рівняння параболи має ви- |
|
гляд: y =7 − 8 x + 2 x2 .
Ефективніше за все можна зберігати коефіцієнти лінійної системи A x = B як матрицю розміру N х (N+1) (розширена матриця (2.13)). Коефіцієнти В зберігаються в (N+1)- му стовпці матриці. В такому випадку систему рівнянь представляють у вигляді:
Розширена матриця (2.13)
Матриця розміру N х (N+1). Позначається як A B
|
|
|
a11 |
a12 L a1N |
b1 |
|
|
|||||
|
|
|
a |
|
a |
|
L a |
|
b |
|
|
|
A |
|
B |
= |
21 |
|
22 |
|
|
2 N |
2 |
|
(2.13) |
|
|
|
|
M |
M |
L |
M |
M |
|
|
||
|
|
|||||||||||
|
|
|
|
|
a |
|
L |
a |
|
b |
|
|
|
|
|
a |
N 1 |
N 2 |
NN |
|
|
||||
|
|
|
|
|
|
|
N |
|
||||
До розширеної матриці також можна застосовувати операції відповідно до вищевикладеної теореми про елементарні перетворення.
Визначення (головний елемент). Коефіцієнт arr матриці А, що використається, щоб
45

виключити елементи akr , де k = r + 1, r + 2,K, N , називається r -м головним (ведучим)
елементом і r -я рядок – головним рядком.
Приклад. Представити наступну систему у формі розширеної матриці, знайти еквівалентну їй верхню трикутну систему лінійних рівнянь і її рішення
x1 + 2 x2 + x3 +4 x4 =13
2 x1 |
+0 x2 +4 x3 + 3 x4 = 28 |
4 x1 |
+ 2 x2 + 2 x3 + x4 =20 |
−3 x1 + x2 + 3 x3 + 2 x4 = 6
Розширена матриця має вигляд: |
|
|
|
|
|
||||||
|
|
|
|
|
|
2 |
1 |
4 |
13 |
|
|
|
|
|
1 |
||||||||
|
Головний елемент |
||||||||||
|
|
|
|
|
|
|
|
|
|||
2 |
0 |
4 |
3 |
28 |
|||||||
|
|
m21=2 |
|
|
|||||||
|
|
m31=4 |
|
4 |
2 |
2 |
1 |
20 |
|
||
|
|
|
−3 1 |
3 |
2 |
6 |
|
||||
|
|
m41=-3 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Перший рядок використається, щоб виключити елементи під діагоналлю в першому стовпці. Ми звертаємося до першого рядка, як до головного, і називаємо елемент a11 = 1 головним елементом (2.14). Значення mk 1 є множником рядка 1, що віднімаємо з k рядків, k = 2,3,4 . Результатом першого виключення буде:
Головний елемент (2.14)
Коефіцієнт arr матриці А, |
що |
використається, |
|
щоб |
виключити елементи akr , де |
|||||
k = r + 1, r + 2,K, N , називається |
r -м головним (ведучим) елементом і r -ий рядок – |
|||||||||
головним рядком. |
|
|
|
|
|
|
|
|
||
|
|
|
1 |
2 |
1 |
4 |
|
13 |
|
|
|
|
|
|
|||||||
|
Головний елемент |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
−4 |
|
2 |
−5 |
|
2 |
||
|
|
|
0 |
|
|
|
||||
|
m32=1,5 |
0 |
−6 |
|
−2 −15 |
|
−32 |
|
||
|
|
7 |
6 |
14 |
|
45 |
|
|||
|
m42=-1,75 |
0 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Другий рядок використається, щоб виключити елементи під діагоналлю в другому стовпці. Цей рядок є головним, і значення mk 1 є множником рядка 2, що віднімаємо з k рядків, k = 3,4 . Результатом виключення буде.
|
|
|
|
1 |
2 |
1 |
4 |
|
13 |
|
|
|
|
|
|
||||||||
|
Головний елемент |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
−4 |
2 |
−5 |
|
2 |
|
||
|
|
|
0 |
0 |
|
|
−7 ,5 |
|
−35 |
|
|
|
|
|
|
−5 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
m43=-1,9 |
|
0 |
9,5 |
5,25 |
|
48,5 |
||||
|
0 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Нарешті, множимо m43 |
= −1,9 на третій рядок, віднімаємо із четвертого рядка і у ре- |
||||||||||
зультаті одержуємо верхню трикутну систему рівнянь
46
|
1 |
2 |
1 |
4 |
|
13 |
|
|
|||||||
|
|
−4 |
2 |
−5 |
|
2 |
|
0 |
|
|
|||||
0 |
0 |
−5 |
−7 ,5 |
|
−35 |
|
|
|
|
0 |
0 |
−9 |
|
−18 |
|
0 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Для рішення системи лінійних рівнянь скористаємося алгоритмом зворотної підстановки і одержимо:
x4 = 2 |
x3 = 4 |
x2 = −1 |
x1 = 3 |
Описаний вище процес називається методом виключення Гауса і повинен бути модифікований таким чином, щоб його можна було використати в більшості випадків. Якщо akk = 0 , то рядок k не можна використати для виключення елементів стовпця k і рядок k
варто замінити таким же рядком під діагоналлю, щоб одержати головний елемент, що не дорівнює нулю. Якщо цього не можна зробити, виходить, матриця коефіцієнтів системи лінійних рівнянь є виродженою і система не має єдиного рішення.
Розглянемо рішення системи в загальному виді на прикладі системи 4 рівнянь із 4 невідомими:
a11 x1 + a12 x2 + a13 x3 |
+ a14 x4 =a15 |
|
||||
|
x1 |
+ a22 x2 |
+ a23 x3 |
+ a24 x4 |
=a25 |
|
a21 |
(2.14) |
|||||
|
x1 |
+ a32 x2 |
+ a33 x3 |
+ a34 x4 |
=a35 |
|
a31 |
|
|||||
|
x1 |
+ a42 x2 |
+ a43 x3 |
+ a44 x4 |
=a45 |
|
a41 |
|
|||||
Перший крок. Оберемо провідний (головний) елемент першого кроку, відмінний від 0. Якщо a11 ≠ 0 , то візьмемо його за ведучий на першому кроці, якщо дорівнює 0, то перес-
тавимо рівняння в системі так, щоб a11 ≠ 0 .
Розділимо перше рівняння на провідний елемент a11 , одержимо рівняння:
|
|
|
|
x1 + |
a12 |
x2 + |
a13 |
x3 |
+ |
a14 |
x4 |
= |
a15 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
a11 |
|
|
|
|
|||||||||||||
|
|
a1 j |
|
|
|
a11 |
|
|
|
a11 |
|
a11 |
|
|
|
|
|
|||||||
(1) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Позначимо a1 j |
= |
|
. Тоді рівняння прийме вид: |
|
|
|
|
|
|
|
||||||||||||||
a11 |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Виключимо x1 |
|
|
|
x1 + a12(1) x2 + a13(1) x3 + a14(1) x4 = a15(1) |
|
|
||||||||||||||||||
з інших рівнянь системи, склавши їх з першим, помноженим, відпові- |
||||||||||||||||||||||||
дно, на −ai 1 (i ≥ 2). Для коефіцієнтів при x2 , x3 , x4 введемо позначення: |
|
|||||||||||||||||||||||
|
|
|
|
|
aij(1) = aij −ai 1 a1(1j) , (i, j ≥ 2) |
|
|
|
|
|
||||||||||||||
Розглянемо систему: |
a11 x1 + a12(1) x2 + a13(1) x3 |
+ a14(1) x4 =a15(1) |
|
|||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||
|
|
|
|
x |
|
+ a(1) |
x |
|
+ a(1) x |
|
+ a(1) x |
|
=a(1) |
|
||||||||||
|
|
|
|
|
|
|
|
(2.15) |
||||||||||||||||
|
|
|
|
|
1 |
22 |
|
|
2 |
23 |
|
|
3 |
24 |
|
|
4 |
25 |
|
|||||
|
|
|
|
x1 + a32(1) x2 |
+ a33(1) x3 |
+ a34(1) x4 =a35(1) |
|
|||||||||||||||||
|
|
|
|
x1 |
+ a42( |
) |
x2 |
+ a43( |
) x3 |
+ a44( |
) x4 |
=a45( |
) |
|
||||||||||
|
|
|
|
|
|
1 |
|
|
|
1 |
|
|
|
1 |
|
|
|
1 |
|
|
||||
Взявши останні три рівняння, одержимо систему трьох рівнянь із трьома невідомими:
a22(1) x2 + a23(1) x3 + a24(1) x4 |
= a25(1) |
|
||||
|
(1) |
(1) |
(1) |
x4 |
(1) |
(2.16) |
a32 |
x2 + a33 |
x3 + a34 |
= a35 |
|||
|
(1) |
(1) |
(1) |
x4 |
(1) |
|
|
a42 |
x2 + a43 |
x3 + a44 |
= a45 |
|
|
|
|
|
|
|
|
|
47

У системі (2.16) розділимо перше рівняння на a22(1) ≠ 0 для виділення x2 (якщо a22(1) = 0 , те міняємо рівняння місцями):
x2 + a23(2) |
x3 + a24(2) |
x4 |
= a25(2) , де |
a2(2j) = a2(1j) |
(1) , ( j > 2) |
(2.17) |
||||||
Виключивши x2 |
|
|
|
|
|
|
|
|
|
a22 |
|
|
з інших рівнянь (2.16) одержимо їх у вигляді: |
|
|||||||||||
|
|
(2) |
x3 |
(2) |
x4 |
|
(2) |
|
|
|||
|
a33 |
+ a34 |
|
= a35 |
|
(2.18) |
||||||
|
|
(2) |
x |
|
+ a(2) x |
|
= a(2) |
|
||||
|
a |
3 |
4 |
|
|
|||||||
|
|
43 |
|
44 |
|
|
|
45 |
|
|
||
де aij(2) = aij(1) −ai(21) a2(2j) , (i, j ≥ 3) |
|
|
|
|
|
|
|
|||||
І, нарешті, розділивши перше рівняння (2.18) на a33(2) , одержимо: |
|
|||||||||||
x3 + a34(3) |
x4 = a35(3) , де a3(3j) |
= a3(2j) |
(2) , ( j > 3) |
(2.19) |
||||||||
Виключивши x3 |
|
|
|
|
|
|
|
|
|
a33 |
|
|
із другого рівняння (2.18) одержимо: |
|
|||||||||||
a44(3) x4 = a45(3) |
|
(aij(3) |
= aij(2) |
−ai(32) a3(3j) , |
i , j ≥ 4) |
(2.20) |
||||||
Звідси вже можна знайти x4 .
На цьому закінчується прямий хід. Легко доглянути загальний вигляд формул перерахування коефіцієнтів для прямого ходу:
akj(k) = akj(k −1) |
(k −1) , ( j > k , k |
|
ajk |
aij(k ) = aij(k−1) −aik(k−1) akj(k) , (i ,
= 1,2,...,n)
j ≥ k )
(2.21)
(2.22)
Формула (2.21) - для провідних рівнянь, а (2.22) - для інших.
Таким чином, у результаті прямого ходу отримана верхня трикутна система з рівнянь
(2.15), (2.17), (2.19) і (2.20) з якої можна знайти:
a(3)
x4 = 45 a44(3) , x3 = a35(3) −a34(3) x4 ,
x2 = a25(2) −a23(2) x3 −a24(2) x4 ,
x1 = a15(1) −a14(1) x4 −a13(1) x3 −a12(1) x2
Це називається зворотним ходом.
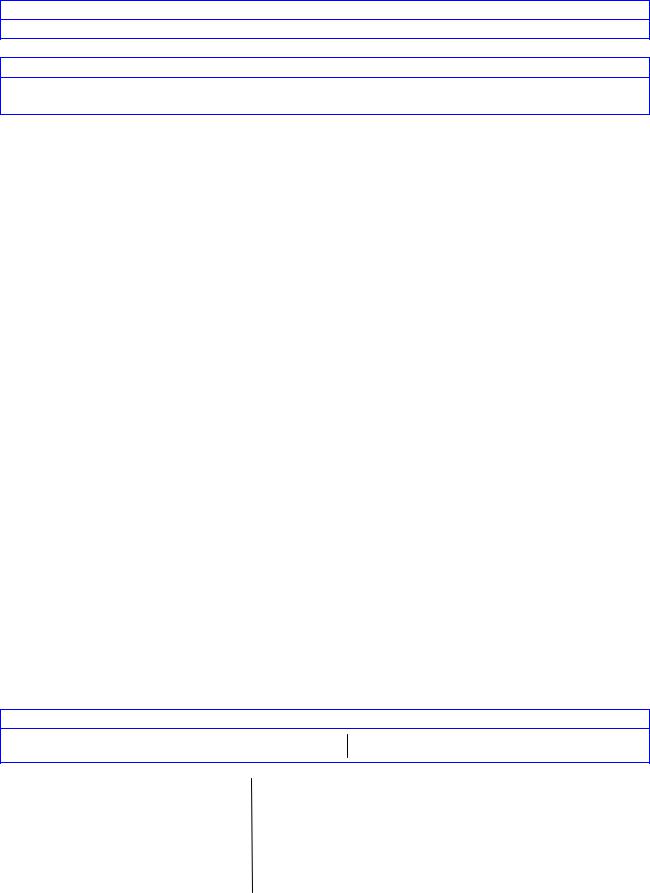
1.4. Схема єдиного ділення і реалізація метода Гауса в MS Excel
Обчислення по методу Гауса зручно зводити в таблицю (табл. 2.1), що називається
схемою єдиного ділення.
48

Таблиця 2.1
Схема єдиного ділення
|
Коефіцієнти при невідомих |
|
Праві час- |
Контрольна |
Розділ |
|||
x1 |
|
x2 |
x3 |
|
x4 |
тини |
торба |
|
|
|
|
||||||
a11 |
|
a12 |
a13 |
a14 |
a15 |
a16 |
|
|
a21 |
|
a22 |
a23 |
a24 |
a25 |
a26 |
A |
|
a31 |
|
a32 |
a33 |
a34 |
a35 |
a36 |
||
|
|
|||||||
a41 |
|
a42 |
a43 |
a44 |
a45 |
a46 |
|
|
1 |
|
a12(1) |
a13(1) |
a14(1) |
a15(1) |
a16(1) |
|
|
- |
|
a22(1) |
a23(1) |
a24(1) |
a25(1) |
a26(1) |
A1 |
|
- |
|
a32(1) |
a33(1) |
a34(1) |
a35(1) |
a36(1) |
||
|
|
|||||||
- |
|
a42(1) |
a43(1) |
a44(1) |
a45(1) |
a46(1) |
|
|
|
1 |
a23(2) |
a24(2) |
a25(2) |
a26(2) |
|
||
|
- |
a33(2) |
a34(2) |
a35(2) |
a36(2) |
A2 |
||
|
- |
a43(2) |
a44(2) |
a45(2) |
a46(2) |
|
||
|
|
|
1 |
|
a34(3) |
a35(3) |
a36(3) |
A3 |
|
|
|
- |
|
a44(3) |
a45(3) |
a46(3) |
|
|
|
|
|
|
||||
|
|
|
|
|
1 |
x4 |
x4 |
|
|
|
|
1 |
|
|
x3 |
x3 |
B |
|
1 |
|
|
|
x2 |
x2 |
||
|
|
|
|
|
||||
1 |
|
|
|
|
|
x1 |
x1 |
|
Приклад розв’язання системи лінійних рівнянь за методом Гауса в MS Excel наведено на рис. 2.2
1.5. Ітераційні методи розв’язання систем лінійних рівнянь
При великому числі невідомих лінійної системи схема методу Гауса, що дає точне рішення, стає досить складною. У цьому випадку доцільніше використати наближені (ітераційні) чисельні методи рішення систем лінійних рівнянь. Розглянемо два з таких методів -
метод ітерацій (2.15) і метод Зейделя.
Ітерація (2.15)
Ітерація (від лат. iteratio — повторення), повторне вживання якої-небудь математичної операції.
49