

ПЗ_ЕПА_заочное
.pdfрозрядів шини даних АЦП чи ЦАП (молодші біти ЦАП повинні бути підключені до загального проводу). При використанні АЦП необхідно, крім шини даних АЦП, також підключити до ОЕОМ два керуючих сигнали: пуск перетворення (START) і готовність даних (READY). Шину даних АЦП чи ЦАП рекомендується підключати до виводів порту Р1.
АЦП послідовного наближення К1113ПВ1 являє собою функціонально завершену напівпровідникову БІС, що використовується в керуючих і вимірювальних системах для узгодження аналогових датчиків з цифровими пристроями обробки інформації. ІМС К1113ПВ1 являє собою 10-розрядний АЦП, що працює з однополярним і двуполярним вхідними напругами. Переключення режиму роботи здійснюється шляхом подачі керуючого сигналу на вхід O/D. Процес перетворення аналогового сигналу в цифровий код запускається шляхом подачі на вхід START сигналу «ПУСК» (лог. 0). Для збросу поточного вихідного коду, перед запуском перетворення, необхідно подати на вхід START сигнал логічної одиниці тривалістю не менш 2 мкс. У процесі перетворення на виході АЦП READY підтримується сигнал логічної одиниці. По закінченні перетворення на шині даних АЦП з'явиться цифровий код пропорційний вхідному аналоговому сигналу, а на виході READY сигнал лог. 0. Мікроконтролер, одержавши з виходу АЦП READY сигнал готовності, може прочитати результат перетворення із шини даних. Призначення виводів АЦП К1113ПВ1 наведено на рис. 5:
|
|
DD1 |
||
|
INA |
|
ADC |
|
|
|
|||
13 |
|
|
||
|
|
|
||
|
GNDA |
|
|
|
14 |
|
|||
|
|
|
||
|
|
|
|
|
|
(O)/D |
|
1 |
|
15 |
||||
|
|
|||
|
(START) |
|
ПВ |
|
11 |
||||
|
|
1113 |
||
|
READY |
|
||
17 |
||||
|
|
К |
||
|
|
|
||
|
|
|
|
|
|
VCC1 |
|
|
|
10 |
|
|||
|
|
|
||
|
VCC2 |
|
|
|
12 |
|
|||
|
|
|
||
|
GNDD |
|
|
|
16 |
|
|||
|
|
|
||
|
|
|
|
|
D0 18
D1 1
D2 2
D3 3
D4 4
D5 5
D6 6
D7 7
D8 8
D9 9
Рис. 5. УГП АЦП типу К1113ПВ1
D0 – D9 – цифрові виходи;
O/D - вибір типу вхідного сигналу. При подачі на цей вхід «цифрової зе-
11
млі» на вхід АЦП можна подавати однополярний сигнал у діапазоні 0 - +10,24 В, якщо вивід 15 знаходиться в повітрі, то на вхід можна подавати біполярний сигнал у діапазоні -5,12 ... +5,12 В;
START – вхід запуску перетворення: лог. 1 – скидання АЦП, лог. 0 – запуск перетворення АЦП;
READY – вихід готовності даних: лог. 1 – результат перетворення ще не готовий, лог. 0 – перетворення завершене;
INA – вхід аналогового сигналу (подається відносно аналогової землі
GNDA);
VCC1 – вивід напруги живлення: +5 В;
VCC2 – вивід напруги живлення: -15 В. Параметри АЦП типу К1113ПВ1:
-розрядність – 10 біт;
-диференціальна нелінійність – 0,1%;
-час перетворення – 30 мкс;
-напруга зсуву нуля – не більш 0,3 В;
-діапазон вхідної напруги: 0 ... 10,24 В або -5,12 ... +5,12 В;
-вхідний опір – 10 кОм;
-струм споживання не більш 20 мА;
-напруга живлення - +5 В±5%/-15 В±5%;
-вихідні логічні сигнали – ТТЛ - стандарт.
Перемножувальний ЦАП типу К572ПА1 виробляє струм, лінійно зв'язаний із двійковим керуючим кодом. Для одержання напруги, до токового виходу ЦАП (I1 чи I2) необхідно підключити перетворювач струму в напругу, який можна реалізувати на операційному підсилювачі. Приклад підключення ЦАП К572ПА1 наведено на рис. 6.
ЦАП використовується для формування аналогових сигналів у цифрових вимірювальних пристроях, а також для керування аналоговими виконавчими механізмами. ЦАП К572ПА1 виконаний по КМОП - технології і являє собою матрицю резисторів типу R-2R, а також набір ключів, виконаних на МОПтранзисторах. Для керування даною ІМС не потрібно ніяких керуючих сигналів, необхідно тільки підключити до виводу UREF джерело опорної напруги, що буде задавати необхідний діапазон вихідної напруги.
Призначення виводів ЦАП К572ПА1 (див. рис. 6): D0 –D9 – цифрові входи;
I1, I2 – токові виходи;
12
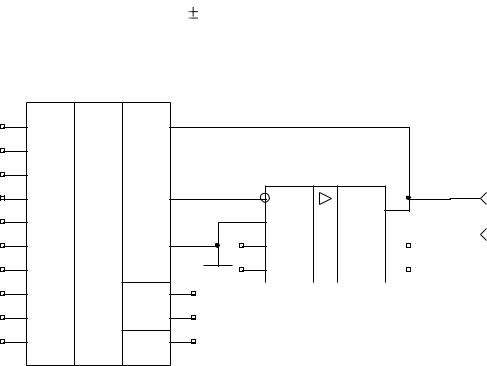
Roc – вивід резистору зворотного зв'язку; UREF – вхід опорної напруги. Параметри ЦАП типу К572ПА1:
-розрядність – 10 біт;
-диференціальна нелінійність – 0,1%;
-час перетворення – 5 мкс;
-напруга джерела живлення – не більш 17 В;
- опорна напруга – не більш 15 В;
-струм споживання – не більш 2 мА;
-вхідні логічні сигнали – ТТЛ - стандарт.
4D9
5D8
6D7
7D6
8D5
9D4
10 D3
11 D2
12 D1
13 D0
DD1
DAC
К572ПА1
Roc 16
I1 1
I2 2
VCC 14
GND 3
UREF 15
|
DA1 |
|
Uвых |
|
|
|
|
2 |
|
OUT |
6 |
|
X1 |
||
|
|
||
|
|
|
3 |
|
|
|
|
|
1 |
|
|
|
|
|
7 |
+U |
|
|
RB2 |
|
|
|
|
X2 |
||
|
|
5 |
|
|
|
||||||
4 |
-U |
|
|
RB1 |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
LF355N |
|
|
|
|
|
|
|
||
Рис. 6. УГП ЦАП типу К572ПА1
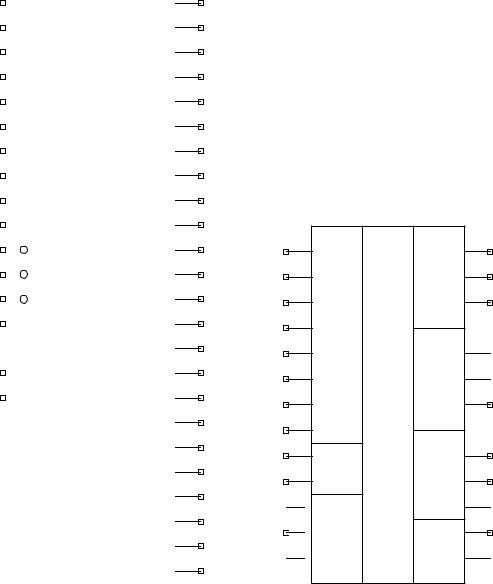
При підключенні ПІТ типу К580ВИ53 чи ППІ типу К580ВВ55 необхідно обов’язково підключити до ОЕОМ адресні входи А0 і А1, а також входи керування режимами запису (WR) і читання (RD). Входи керування CS і RESET можна до ОЕОМ не підключати, тому що дані пристрої використовуються в системі в однині. На дані виводи треба подати логічні сигнали від джерела живлення в залежності від алгоритму роботи даного зовнішнього пристрою. Для підключення шини даних ПІТ або ППІ необхідно використовувати порт Р1, а для формування керуючих сигналів використовувати порт Р3 ОЕОМ.
БІС типу К580ВИ53 являє собою програмний інтервальний таймер, що призначений для формування часових затримок і реалізації часових функцій: генерування сигналів змінної частоти, підрахунок числа зовнішніх подій і т.п. Тривалість часових інтервалів можна задавати програмно у двійковій або
13
двійково-десятичній формі.
|
|
|
DD1 |
|
|
|
|
|
|
34 |
|
D0 |
PIO |
PA0 |
|
|
|||
33 |
|
|
||
|
D1 |
|
PA1 |
|
32 |
|
|
||
|
D2 |
|
PA2 |
|
31 |
|
|
||
|
D3 |
|
PA3 |
|
30 |
|
|
||
|
D4 |
|
PA4 |
|
29 |
|
|
||
|
D5 |
|
PA5 |
|
28 |
|
|
||
|
D6 |
|
PA6 |
|
27 |
|
|
||
|
D7 |
|
PA7 |
|
9 |
|
|
||
|
|
|
|
|
|
A0 |
|
PB0 |
|
8 |
|
|
||
|
A1 |
|
PB1 |
|
5 |
|
|
||
|
|
|
|
|
|
RD |
|
PB2 |
|
36 |
|
K580BB55 |
||
|
WR |
PB3 |
||
6 |
|
|||
|
CS |
PB4 |
||
35 |
|
|
||
|
RES |
|
PB5 |
|
|
|
|
||
26 |
|
|
|
PB6 |
|
|
|
||
|
VCC |
|
PB7 |
|
7 |
|
|
||
|
|
|
|
|
|
GND |
|
PC0 |
|
|
|
|
||
|
|
|
|
PC1 |
|
|
|
|
PC2 |
|
|
|
|
PC3 |
|
|
|
|
PC4 |
|
|
|
|
PC5 |
|
|
|
|
PC6 |
|
|
|
|
PC7 |
|
|
|
|
|
4
3
2
1
40
39
38
37
18
19
20
21
22
23
24
25
14
15
16
17
13
12
11
10
8 D0
7 D1
6 D2
5 D3
4 D4
3 D5
2 D6
1 D7
19A0
20A1
 22
22
 RD 23
RD 23
 WR
WR  21
21
 CS
CS
DD2
CT
К580ВИ53
C0 9
E0 11 OUT0 10
C1 15

E1 14 OUT1 13
OUT1 13
C2 18
E2 16 OUT2 17 VCC 24 GND 12
VCC 24 GND 12
Рис. 7. УГП ППІ типу К580ВВ55 і ПІТ типу К580ВИ53
Призначення виводів ПІТ К580ВИ53 (рис. 7): D0 –D7 – шина даних;
A0,A1 – адресні входи;
RD – керуючий вхід: читання з таймера;
WR – керуючий вхід: запис у таймер або РКС; CS – керуючий вхід: вибір мікросхеми;
C(0-2) – вхід тактових імпульсів для таймера (0-2);
E(0-2) – вхід дозволу роботи таймера (0-2): лог. 1 – таймер працює, лог. 0
– таймер не реагує на імпульси, що надходять на тактовий вхід С;
14

OUT(0-2) – вихід таймера (призначення в залежності від режиму роботи таймера).
Параметри ПІТ типу К580ВИ53:
-кількість таймерів – 3;
-розрядність таймерів – 16 біт;
-максимальна частота роботи таймерів - 2 МГц;
-напруга живлення - +5 В 5%;
-потужність споживання – не більш 0,5 Вт;
-діапазон температур - -10 ... +70 0С.
До складу БІС К580ВИ53 входить три 16-розрядних декрементних таймери. Кожен таймер незалежний і може працювати в одному із шести режимів: режим 0 – програмна затримка; режим 1 – програмний одновібратор; режим 2
– програмний дільник частоти; режим 3 – програмний генератор тактових імпульсів; режим 4 – строб із програмним запуском; режим 5 – строб з апаратним запуском. Ініціалізація та керування роботою таймерів здійснюється за допомогою керуючого слова, що записується в регістр керуючого слова (РКС) ПІТ К580ВИ53, структура якого наведена на рис. 8.
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
|
D1 |
D0 |
|
|
|
|
|
|
|
|
|
Вибір таймера |
Читання/Запис |
Режим роботи таймера |
2/ 2-10 |
|||||
|
|
|
|
|
|
|||
|
Рис. 8. Регістр керуючого слова ПІТ К580ВИ53 |
|
|
|||||
Призначення бітів керуючого слова ПІТ:
D7,D6 - вибір РКС таймера: 00 – таймер 0, 01 – таймер 1, 10 – таймер 2; D5,D4 – режим читання/запису: 00 – читання на “льоту”, 01 – запис тіль-
ки молодшого байта, 10 – запис тільки старшого байта, 11 - запис 16 розрядного числа (спочатку молодший байт, потім старший);
D3 – D1 – режим роботи таймера: 000 – режим 0, 001 – режим 1, 010 – режим 2, 011 – режим 3, 100 – режим 4, 101 – режим 5;
D0 – вибір типу лічильника: 0 – двійковий, 1 – двійково - десятичний. Для керування ПІТ К580ВИ53 використовуються п'ять керуючих сигна-
лів, значення яких і тип відповідних їм операцій наведені в таблиці 4.
БІС типу К580ВВ55 являє собою програмний паралельний інтерфейс, що призначений для вводу-виводу цифрових сигналів. До складу БІС К580ВВ55 входить три 8-розрядних порти вводу-виводу (А, В та С). Кожен порт незалежний і може працювати або на ввід, або на вивід інформації. Ініціалізація
15
та керування роботою портів здійснюється за допомогою керуючого слова, що записується в регістр керуючого слова ППІ К580ВВ55, структура якого показана на рис. 9.
|
|
|
|
|
Таблиця 4 |
|
|
|
|
Режими роботи ПІТ К580ВИ53 |
|||
|
|
|
|
|
|
|
WR |
RD |
А1 |
А0 |
CS |
Напрямок передачі та вид операції |
|
0 |
1 |
1 |
1 |
0 |
Запис у РКС |
|
0 |
1 |
0 |
0 |
0 |
Запис у таймер 0 |
|
0 |
1 |
0 |
1 |
0 |
Запис у таймер 1 |
|
0 |
1 |
1 |
0 |
0 |
Запис у таймер 2 |
|
1 |
0 |
0 |
0 |
0 |
Читання змісту таймера 0 |
|
1 |
0 |
0 |
1 |
0 |
Читання змісту таймера 1 |
|
1 |
0 |
1 |
0 |
0 |
Читання змісту таймера 2 |
|
Х |
Х |
Х |
Х |
1 |
ШД у Z - стані |
|
1 |
1 |
Х |
Х |
0 |
||
|
||||||
Призначення бітів керуючого слова ППІ:
D4 – керування режимом роботи порту А: 1 – порт настроєний на ввід інформації, 0 – порт настроєний на вивід інформації;
D3 – керування режимом роботи старшого півбайта порту С: 1 – порт настроєний на ввід інформації, 0 – порт настроєний на вивід інформації;
D1 – керування режимом роботи порту В: 1 – порт настроєний на ввід інформації, 0 – порт настроєний на вивід інформації;
D0 – керування режимом роботи молодшого півбайта порту С: 1 – порт настроєний на ввід інформації, 0 – порт настроєний на вивід інформації.
D7 |
D6 |
D5 |
D4 |
D3 |
D2 |
D1 |
D0 |
|
|
|
|
|
|
|
|
1 |
0 |
0 |
Порт А |
Порт С |
0 |
Порт В |
Порт С |
|
|
|
(А7-А0) |
(С4-С7) |
|
(В7-В0) |
(С3-С0) |
Рис. 9. Регістр керуючого слова ППІ К580ВВ55
Для керування ППІ К580ВВ55 використовуються шість керуючих сигналів, значення яких і тип відповідних їм операцій наведені в таблиці 5.
Призначення виводів ППІ К580ВВ55 (див. рис. 7): D0 –D7 – шина даних;
A0,A1 – адресні входи вибору порту або РКС; RD – керуючий вхід: читання з порту;
WR – керуючий вхід: запис у порт або РКС;
16

RESET – вхід скидання БІС: лог. 1 – усі виводи портів настрояться на ввід, лог. 0 – робочий режим ППІ К580ВВ55;
A0 – A7 – 8-розрядний порт вводу-виводу;
B0 – B7 – 8-розрядний порт вводу-виводу;
C0 – C7 - 8-розрядний порт вводу-виводу.
|
|
|
|
|
|
|
Таблиця 5 |
|
|
|
|
Режими роботи ППІ К580ВВ55 |
|||
|
|
|
|
|
|
|
|
WR |
RD |
А1 |
А0 |
|
CS |
RESET |
Напрямок передачі та вид операції |
0 |
1 |
1 |
1 |
|
0 |
0 |
Запис у РКС |
0 |
1 |
0 |
0 |
|
0 |
0 |
Запис у порт А |
0 |
1 |
0 |
1 |
|
0 |
0 |
Запис у порт В |
0 |
1 |
1 |
0 |
|
0 |
0 |
Запис у порт С |
1 |
0 |
0 |
0 |
|
0 |
0 |
Читання з порту А |
1 |
0 |
0 |
1 |
|
0 |
0 |
Читання з порту В |
1 |
0 |
1 |
0 |
|
0 |
0 |
Читання з порту С |
X |
X |
X |
X |
|
X |
1 |
|
Х |
Х |
Х |
Х |
|
1 |
0 |
ШД у Z - стані |
1 |
1 |
Х |
Х |
|
0 |
0 |
|
Параметри ППІ типу К580ВВ55:
-кількість портів вводу-виводу – 3;
-розрядність портів – 8 біт;
-максимальна частота роботи - 2 МГц;
-напруга живлення - +5 В 5%;
-потужність споживання – не більш 500 мВт;
-діапазон температур - -10 ... +70 0С.
Сигнали керування зовнішніми пристроями, двійкові датчики та дискретні пристрої керування рекомендується підключати до порту Р3 ОЕОМ К1816ВЕ51. Якщо до складу мікропроцесорного пристрою входить ППІ К580ВВ55, то двійкові датчики та дискретні пристрої керування можна підключати до ОЕОМ через порти вводу-виводу даної ІМС.
17
СПИСОК ЛІТЕРАТУРИ
1.Сташин В.В., Урусов А.В., Мологонцева О.Ф. Проектирование цифровых устройств на однокристальных микроконтроллерах. М.: Энергоатомиз-
дат, 1990. - 224 с.
2.Микропроцессоры / Под редакцией Преснухина Л.Н. М.: Высшая шко-
ла, 1986.
3.Каган Б.М., Сташин В.В. Основы проектирования микропроцессорных устройств автоматики. М.: Энергоатомиздат, 1987.
4.Алексенко А.Г., Галицин А.А., Иванников А.Д. Проектирование радиоэлектронной аппаратуры на микропроцессорах. М.: Радио и связь, 1984.
5.Микропроцессоры: Системы программирования и отладки / Под редакцией Мясникова В.А. М.: Энергоатомиздат, 1985.
6.Шевкопляс Б.В. Микропроцессорные структуры. Инженерные решения. М.: Радио и связь, 1986.
7.Федорков Б.Г., Телец В.А. Микросхемы ЦАП и АЦП. М.: Энергоатом-
издат, 1990. - 320 с.
8.Якубовский С.В. Цифровые и аналоговые микросхемы: Справочник. М.: Радио и связь, 1990. - 496 с.
9.Большие интегральные схемы запоминающих устройств: Справочник. Под ред. Гордонова А.Ю. и Дьякова Ю.Н. М.: Радио и связь, 1990. – 288 с.
10.Шило В.Л. Популярные цифровые микросхемы: Справочник. М.: Радио и связь, 1987. - 352 с.
11.Гутников В.С. Интегральная электроника в измерительных устройствах. Л.: Энергоатомиздат, 1988. – 304 с.
18
Додаток 1
Зразок титульного листа індивідуального завдання
МІНІСТЕРСТВО ОСВІТИ І НАУКИ УКРАЇНИ
Дніпропетровський національний університет залізничного транспорту імені академіка В. Лазаряна
Кафедра АТЗ
Практичне заняття
по дисципліні «Електронні пристрої автоматики»
Виконав: студент групи 3АТЗтв1 Прізвище студента
Перевірив: доцент кафедри АТЗ Профатилов В.І.
Дніпропетровськ 2013
19