

Классификация автоматических систем регулирования (аср)
І. В зависимости от принципа действия АРС классифицируют:
1) АСР по отклонению;
2) АСР по возмущению;
3) АСР комбинированные.
Рассмотрим конкретно эти ситуации.
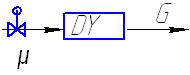
АСР по отклонению:
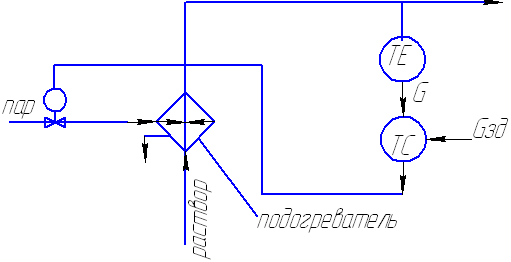
ТЕ - датчик температуры (термопара);
ТС - автоматический регулятор;
G - текущее значение регулируемого параметра;
GЗД - заданное значение этого параметра;
В
АСР – по отклонению регулятор непрерывно
сравнивает текущее значение параметра
с заданным, т.е. выполняет операцию
вычитания:![]() G=G
- GЗД,
если
G=G
- GЗД,
если
![]() G=0,
т.е. отклонение отсутствует, то никаких
перестановок регулирующего органа не
происходит и система находится в
равновесном состоянии.
G=0,
т.е. отклонение отсутствует, то никаких
перестановок регулирующего органа не
происходит и система находится в
равновесном состоянии.
При
появлении рассогласования
![]() G
G![]() 0,
регулятор обычно по величине этого
отклонения
0,
регулятор обычно по величине этого
отклонения![]() G
вырабатывает регулирующее воздействие,
и перемещает регулирующий клапан до
тех пор, пока текущее значение параметра
G не достигнет заданного значения GЗД.
G
вырабатывает регулирующее воздействие,
и перемещает регулирующий клапан до
тех пор, пока текущее значение параметра
G не достигнет заданного значения GЗД.
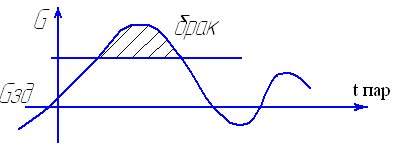
Недостатком такой АСР является временное отклонение регулируемого параметра от заданного значения, причем это отклонение может быть настолько большим, что при этом будет получен некачественный продукт.
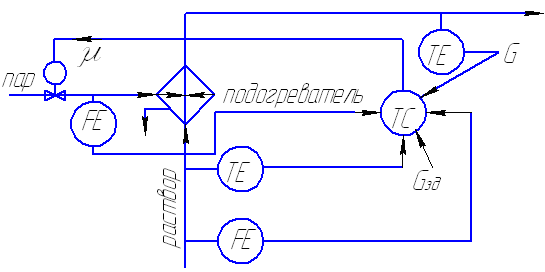
АСР по возмущению:

FE - измерители расхода пара и раствора на входе в подогреватель;
ТЕ - измеритель температуры раствора на входе в подогреватель;
В АСР по возмущению измеряются основные возмущающие параметры, значения которых воспринимает регулятор и в соответствии с заложенным алгоритмом обрабатывает их и вырабатывает регулирующее воздействие. В этих АСР отсутствует обратная связь, т.е. не измеряется непосредственно значение регулируемого параметра, поэтому такие АСР называются ещё разомкнутыми.
Отсутствие обратной связи (т.е. не измеряется температура на выходе из подогревателя) не позволяет осуществлять точное регулирование параметра в таких АСР.
Недостатки:
1)недостаточно высокая точность регулирования из-за отсутствия обратной связи в системе.
2)необходимо измерять все основные возмущающие параметры, для чего требуется установить дополнительные приборы и, соответственно, система регулирования становится более дорогой.
Комбинированные АСР:
В
комбинированных АСР регулирующее
воздействие осуществляется как по
величине отклонения измеряемого
регулируемого параметра от заданного
значения
![]() ,
так и с учетом измеряемых значений
основных возмущающих параметров.
,
так и с учетом измеряемых значений
основных возмущающих параметров.
Такие
АСР дают высокую точность регулирования
(отклонение параметра от
![]() ЗД
будет min).
ЗД
будет min).
Недостаток: громоздкость системы регулирования и необходимость измерения большого числа возмущающих параметров.
I I. По характеру алгоритма функционирования аср делятся:
1)стабилизирующие;
2)программные;
3)следящие.
Стабилизирующей АСР называется система, которой предписано поддерживать регулируемый параметр на строго заданном значении
![]() і=
і=![]() ЗД
;
ЗД
;
![]() ЗД=const.
ЗД=const.
Программной АСР называется система, которой предписано поддерживать регулируемый параметр в соответствии с заранее заданной временной программой.
![]() і=
і=![]() ЗД;
ЗД;
![]() ЗД=f(t),
ЗД=f(t),
где
![]() і
- текущее значение регулируемого
параметра;
і
- текущее значение регулируемого
параметра;
![]() ЗД
–
заданное значение; t – текущее время
; f(t) – заданная программа.
ЗД
–
заданное значение; t – текущее время
; f(t) – заданная программа.
Следящей АСР называется система, которая содержит предписание изменять регулируемую величину в зависимости от изменения другой величины, изменение которое происходит случайным образом.
![]() і=f(z),
где
і=f(z),
где
z – измеряемая величина, которая изменяется во времени случайным образом.
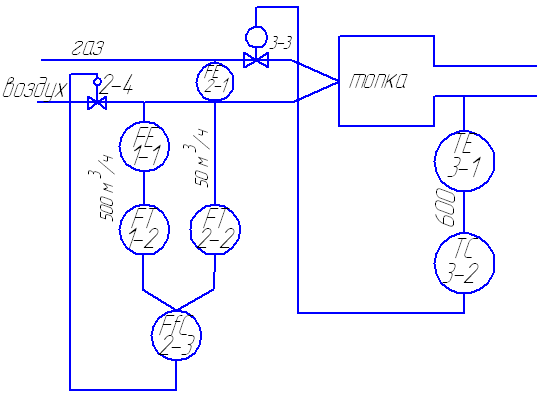
Пример следящей АСР в энергетике представлен ниже. Это регулирование соотношения расходов топливо – воздух с целью полного и эффективного сжигания топлива.
Анализ объектов регулирования
Свойства объекта регулирования.
Объекты характеризуются тем, что через них непрерывно протекает вещество или энергия. Количество вещества или энергии, которое протекает через объект за единицу времени, называется нагрузкой объекта.
Нагрузка может быть min, max или средняя (оптимальная).
Чтобы управлять объектом, необходимо иметь запас по нагрузке хотя бы 20%.
Все объекты обладают способностью накапливать вещество или энергию.
Ёмкостью объекта управления называется количество содержащегося в нем в данный момент времени вещества или энергии.
Характеристикой объекта является коэффициент ёмкости.
Для гидравлических объектов, содержащих жидкость, коэффициент ёмкости численно равен площади поверхности зеркала жидкости или площади поперечного сечения сосуда.
![]() ,
,
где Н - высота уровня жидкости в ёмкости
Коефициент ёмкости – количество вещества или энергии, которое необходимо прибавить или вывести из объекта, чтобы регулируемый параметр изменился на единицу.
Для тепловых объектов коэффициент ёмкости:
![]() (кДж/0С)
(кДж/0С)
Это - количество тепла,
которое необходимо подать в объект или
вывести из объекта, чтобы температуру
![]() изменить на 1 градус.
изменить на 1 градус.
Коэффициент емкости может быть величиной переменной.
Объекты с переменным коэффициентом емкости менее благоприятны для автоматического управления. Чем больше коэффициент емкости объекта, тем более инерционным является объект.
Динамические характеристики объектов управления
В производственной практике встречаются 2 вида объектов:
-статические (устойчивые) ;
-астатические (нейтральные);
-неустойчивые (реактор Чернобыля).
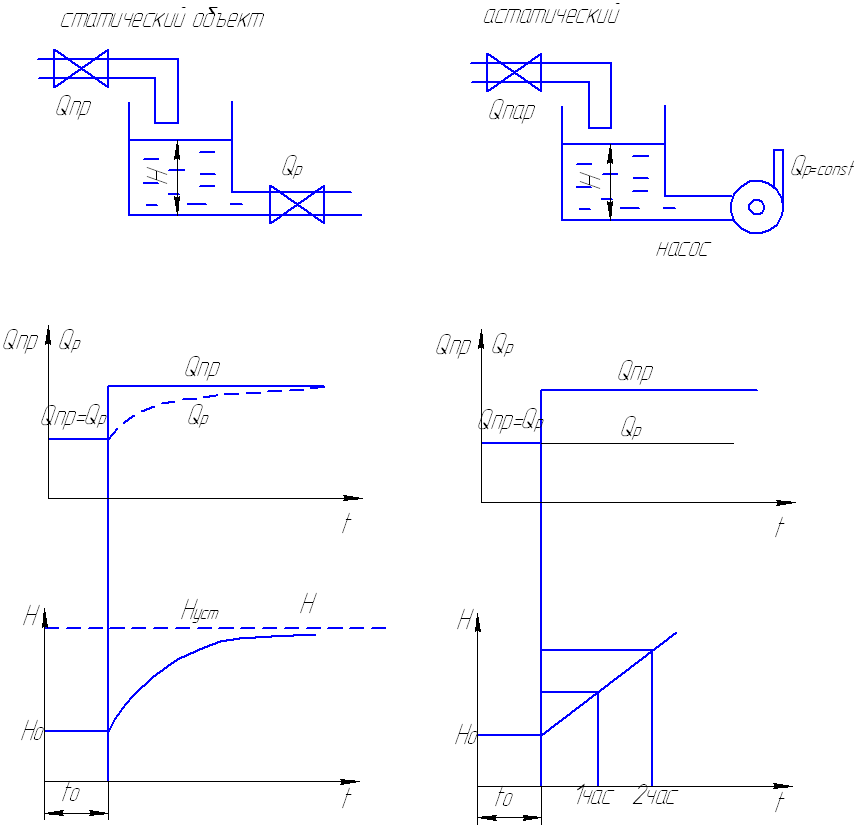
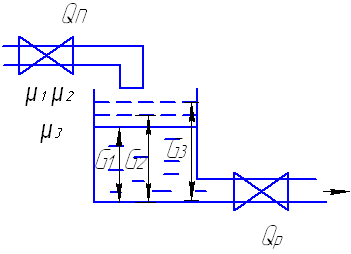
Qпр-приход жидкости; Qр-расход жидкости;
Н0-начальное значение уровня;
Н- текущее значение уровня;
Нуст- установившееся значение уровня;
t-текущее время;
t0-момент внесения возмущения.
Статические объект обладает свойством самовыравнивания (саморегулирования).
При нарушении равенства притока и расхода, такой объект приходит к новому установившемуся равновесию без помощи регулятора. Это связано с тем, что статический объект имеет внутреннюю обратную связь.
При увеличении притока
жидкости уровень в объекте начинает
постепенно увеличиваться : и при этом
увеличивается гидростатическое давление
( пред золотником клапана). Это приводит
к тому, что через золотник с определенным
сечением увеличивается расход жидкости.
Наступает такой момент, когда Qпр
= Qр
и изменение уровня прекращается, потому
что имеет место обратная связь : Qр![]() , т.е. чем больше уровень, тем больше
расход.
, т.е. чем больше уровень, тем больше
расход.
Астатические объекты свойством самовыравнивания не обладают. При нанесении на объект ступенчатого возмущения в таком объекте уровень жидкости будет изменяться непрерывно с постоянной скоростью. Это происходит потому, что астатические объекты не имеют внутренней обратной связи. В данном случае производительность насоса, который откачивает жидкость , не зависит от изменения уровня.
Динамические характеристики объектов могут быть выражены аналитически в виде дифференциальных уравнений или графически. При этом динамические свойства объекта представляют кривыми разгона, которые еще называются временным характеристиками.
Кривая разгона представляет графически зависимость изменения регулируемого параметра во времени при нанесении на объект ступенчатого возмущения. Если на объект наносится импульсное возмущение , то получаем импульсную характеристику.
§ Запаздывания в объектах управления.
Большинство объектов управления обладают запаздыванием.
При нанесении на объект возмущения выходная величина остаётся некоторое время без изменения – это и есть чистое время запаздывания – это интервал времени от начала возмущения до начала изменения выходного параметра.

l – длина ленточного питателя, м;
V – скорость перемещения ленты, м/с.
Время транспортного (чистого) запаздывания вычисляют по формуле:
![]() ,
[с]
,
[с]
l = 5 м; V
= 0,5 м/с;
![]() с.
с.
Различают запаздывания в объектах:
1) чистое или транспортное;
2) емкостное или переходное;

l = 100;
V = 1 м/с;
![]() с.
с.
Запаздывание определяют в основном по кривой разгона, которую снимают экспериментально. Для простых объектов время запаздывания можно рассчитать аналитически.
Рассмотрим, как определяется время запаздывания по кривым разгона.
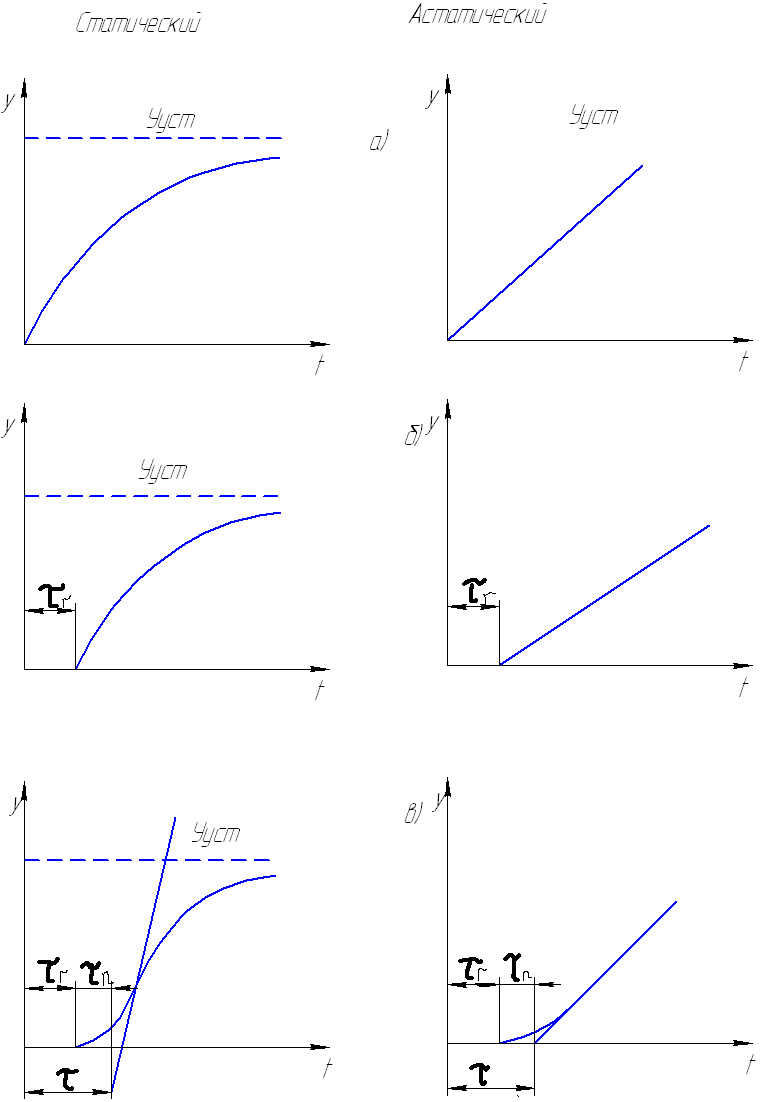
![]() –ступенчатое возмущ-е,
которое наносится на объект;
–ступенчатое возмущ-е,
которое наносится на объект;
![]() - время чистого запаздывания;
- время чистого запаздывания;
![]() - время переходного запаздывания.
- время переходного запаздывания.
Кривая а) запаздыванием не обладает.
В случае б)
объекты обладают
![]() чистым запаздыванием.
чистым запаздыванием.
Кривые в) обладают и чистым и переходным запаздыванием.
При расчете АСР учитывают в основном полное запаздывание, которое рассчитывают:
![]()
Запаздывание в объектах
отрицательно влияет на работу АСР, оно
существенно снижает качество регулирования,
поэтому при конструировании объектов
необходимо стремиться уменьшить
![]() .
.
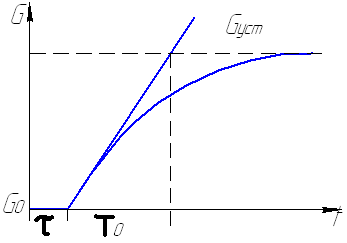
Экспериментальное снятие кривой разгона.
Для синтеза АСР необходимо знать динамические характеристики объекта управления, которые определяют в основном по экспериментально снятой кривой разгона. Перед снятием этой кривой объект приводят в состояние равновесия, т.е.
![]() , (приток = расход),
, (приток = расход),
при этом регулируемый параметр σ = const.
Затем на объект наносят ступенчатое возмущение величиной 10 - 20%. С момента нанесения возмущения начинают фиксировать изменение выходного параметра σ через определенные отрезки времени.
По кривой разгона определяют коэффициент передачи объекта:
![]() , [% / %].
, [% / %].
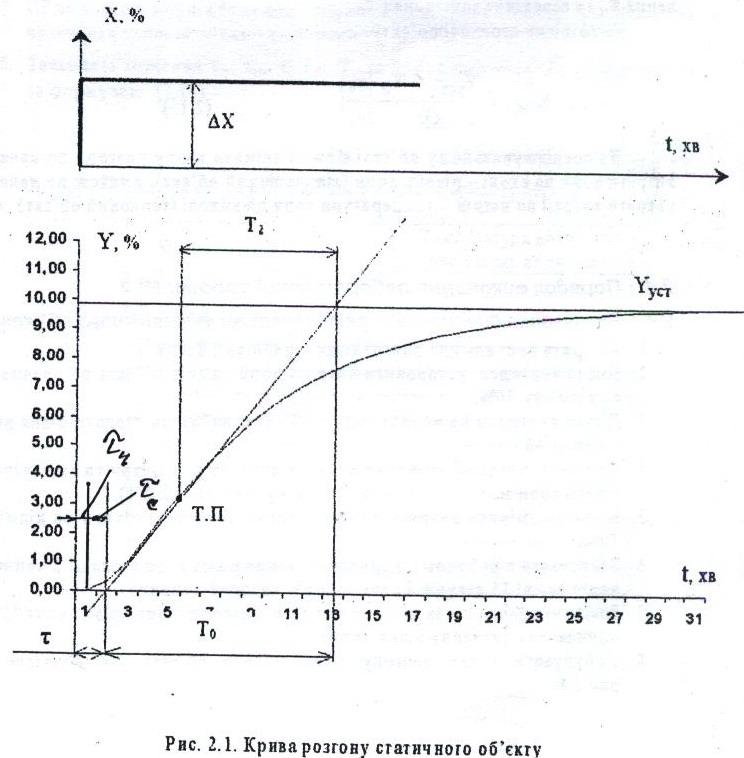
На кривой разгона находят точку nерегиба и через неё проводят касательную.
По касательной определяют
общую постоянную времени
![]() и время полного запаздывания
и время полного запаздывания![]() ,
а также
,
а также![]() ,
,![]() ).
).
Интервал времени от точки
nерегиба до пересечения
касательной с
![]() представляет собой постоянную времени
2-го звена
представляет собой постоянную времени
2-го звена![]() ”.
”.
![]() - постоянную времени 1-го звена вычисляют
по эмпирической формуле из методички.
По этим данным составляют математическую
модель динамики объекта по данному
каналу.
- постоянную времени 1-го звена вычисляют
по эмпирической формуле из методички.
По этим данным составляют математическую
модель динамики объекта по данному
каналу.
Математическую модель динамики представляют в 3-х видах:
1)дифференциальное уравнение 2-го порядка
![]()
![]() .
.
2) переходная функция является результатом решения дифференциального уравнения 2-го порядка, т.е. аналитическое описание экспоненты
![]()
 ,
,
пригодно для случая:
![]() >
>![]() .
.
1′) Дифференциальное уравнение 2-го порядка можно представить в виде системы дифференциальных. уравнений 1-го порядка:
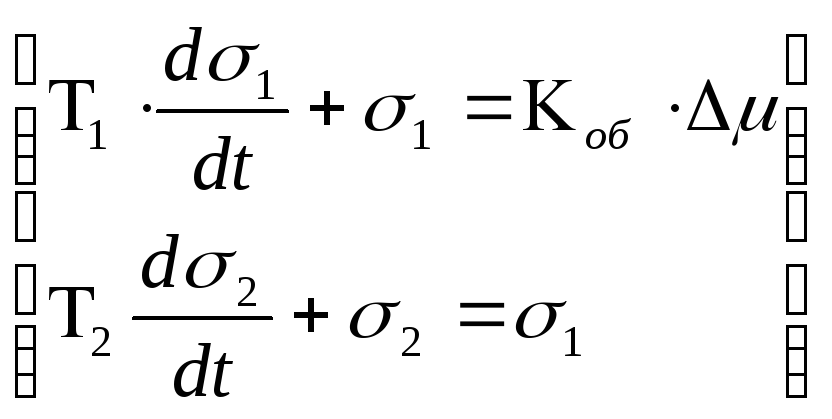
T1
T2![]()



![]()
![]()
3) передаточная функция
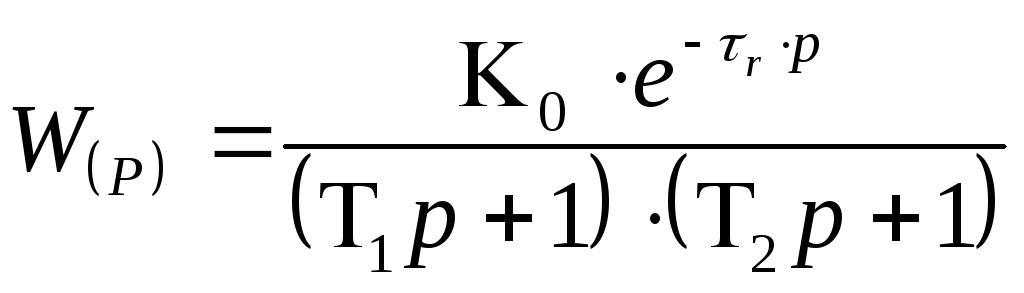 ;
;
![]() - оператор диференц-я.
- оператор диференц-я.
§ Статический одноемкостный объект.
![]() ,
[% / %]
,
[% / %]
а)
![]() если решить это
дифференциальное . уравнение, то получим
переходную функцию б);
если решить это
дифференциальное . уравнение, то получим
переходную функцию б);
б)
![]() уравнение кривой
;
уравнение кривой
;
в) передаточная функция
![]() ;
;
![]() - оператор дифференцирования.
- оператор дифференцирования.
Статические характеристики объектов управления
Статическая характеристика
объекта управления (ОУ) представляет
собой зависимость выходной величины
объекта σ от изменения входной величины
![]() (регулирующего воздействия) в равновесном
состоянии.
(регулирующего воздействия) в равновесном
состоянии.
Обычно статические характеристики ОУ находят экспериментально путем постановки соответствующих опытов.
Для простых объектов статическая характеристика их может быть рассчитана аналитически.
Экспериментальное снятие статической характеристики
Открываем клапан
![]() и уровень увеличивается до
и уровень увеличивается до![]() и т.д.
и т.д.
Д анная
статическая. характеристика получена
для определенного значения расхода
жидкости.
анная
статическая. характеристика получена
для определенного значения расхода
жидкости.
Если
![]() изменить, то статическая характеристика
сместится.
изменить, то статическая характеристика
сместится.
Статический объект имеет
семейство статических характеристик,
положение которой зависит от изменения
расхода жидкости
![]() (от степени открытия клапана)
(от степени открытия клапана)
1 – соответствует min нагрузке объекта;
2 – max нагрузке;
3 – статическая. характеристика астатичического объекта;
4 – статичическая характеристика объекта с идеальным самовыравниванием.
Аналитический расчет статической характеристики
![]() - основное уравнение расхода для
расходомеров переменного перепада
давления.
- основное уравнение расхода для
расходомеров переменного перепада
давления.
В гидравлическом объекте
![]()
![]()
![]() - статическая характеристика гидравлического
объекта
- статическая характеристика гидравлического
объекта
В момент равновесия
![]()
![]()
![]() - коеффициент расхода; F – площадь щели
выходного клапана объекта.
- коеффициент расхода; F – площадь щели
выходного клапана объекта.
Отсюда следует, что
![]()
![]() - статическая характеристика статического
объекта, полученная аналитическики.
- статическая характеристика статического
объекта, полученная аналитическики.
§ Автоматические регуляторы (АР).
Классификация АР:
по конструктивному исполнению регуляторы бывают:
- приборные;
- агрегатные;
- микропроцессорные.
Приборные встраивают внутри измерительных приборов.
Агрегатные выполняют в виде отдельных блоков, из которых можно составить требуемый закон регулирования.
В зависимости от регулируемой величины приборные регуляторы называют по названию измеряемого и регулируемого параметра. Например, регуляторы температуры, …давления, …уровня, … концентрации.
по роду действия:
- регуляторы прерывистого действия, РПД;
- регуляторы непрерывного действия, РНД.
РПД делятся на релейные (позиционные) и импульсные.
В импульсных измер-е регулируемого параметра осущ. непрерывно, а регулир-е возд-е оказ-тся периодически через опред-е инт-лы времени опред-й длительности. Для созд-я импульсных АСР на выходе управ-х ЭВМ устан-т цифроимпульсный преобразователь ЦИП.
У непрерывных регуляторов измер-е регулир-го параметра осуществляется непрерывно и так же непрерывно оказ-тся регулир-е возд-е на объект.
Выбирают род действия регулятора в зависимости от динам. хар-к ОУ
при
![]() >
0,2 (0,1) –релейный
регулятор;
>
0,2 (0,1) –релейный
регулятор;
![]() =
0,2
=
0,2
![]() 1
– регулир-рнепрер-го
действия;
1
– регулир-рнепрер-го
действия;
![]() >
1
(0,6) -
импульсный регулятор.
>
1
(0,6) -
импульсный регулятор.
по способу действия:
- регуляторы прямого действия;
-регуляторы косвенного (непрямого) действия.
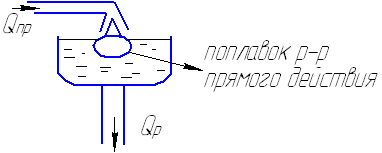
Регулятор непрямого действия использует энергию извне, т.е. требуют подачи энергии для питания.
По виду используемой энергии регуляторы бывают:
- электрический;
- пневматические (используют энергию сжатого воздуха);
- гидравлические (используют энергию жидкости под давлением);
- комбинированные.
по законам регулирования регуляторы классифицируют:
- Пз – позиционные (релейные);
- П – пропорциональные регуляторы (статические);
- И – интегральные (астатические);
- Пи – пропорционально-интегральные (изодромные);
(Изодром – постоянно выравнивающий);
- ПД – пропорционально-диффереренциальные регуляторы (статические с предварением или с упреждением);
- ПИД – пропорционально-интегрально-дифференциальные (изодромные с предварением).
Закон регулирования
представляет собой
зависимость выходной величины регулятора
(положение регулирующего органа
![]() )
от изменения регулируемого параметра
)
от изменения регулируемого параметра![]() .
Зависимость закона регулирования в
общем виде записывается:
.
Зависимость закона регулирования в
общем виде записывается:![]() .
.
Позиционные (релейные) регуляторы
Позиционные регуляторы бывают:
- 2-хпозиционные;
- 3-хпозиционные;
- многопозиционные;
Двухпозиционным называется регулятор, в котором в зависимости от значения регулируемого параметра регулирующий орган может занимать только два фиксированных положения: открыто или закрыто, (включено или выключено).
Закон регулирования двухпозиционного регулятора:
µ=1 при G < GЗД (включено);
µ=0 при G > GЗД (отключено).
Переходной процесс регулирования – изменение регулируемого параметра во времени в процессе регулирования.
Вид переходного процесса двухпозиционного регулирования представлено ниже:
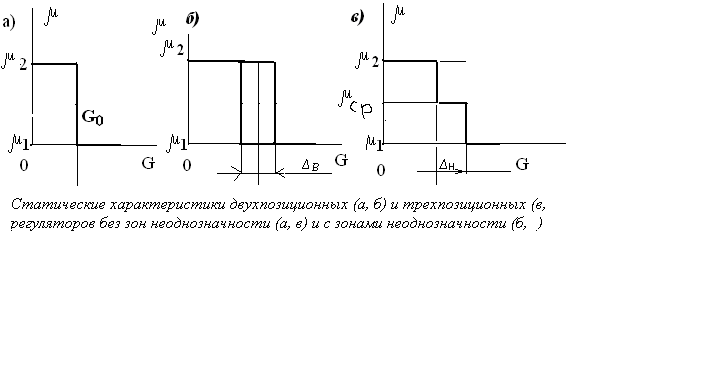
а) двухпозиционное регулирование без зоны нечувствительности;
б) двухпозиционное регулирование с зоной нечувствительности
а)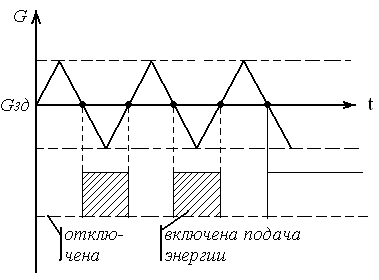
б)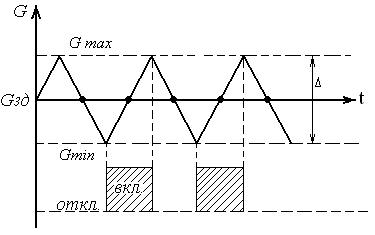
Закон регулирования двухпозиционного регулятора с зоной нечувствительности:
µ = 1 при G<GЗД + ∆/2 ;
µ = 0 при G>GЗД - ∆/2 .
(G – значение регулируемого параметра; GЗД – заданное значение регулируемого параметра; μ – положение регулирующего органа.)
Двухпозиционные регуляторы с зоной нечувствительности (неоднозначности) имеют единственный параметр настройки − величину зоны нечувствительности ∆. С увеличением зоны нечувствительности качество регулирования ухудшается, но уменьшается число срабатывания аппаратуры. Под качеством регулирования понимают величину отклонения регулируемого параметра от заданного значения GЗД.
Трехпозиционные регуляторы.
Трехпозиционным называется регулятор, у которого в зависимости от значения регулируемого параметра регулирующий орган может занимать помимо двух крайних положений еще одно среднее положение.
Закон регулирования трехпозиционного регулятора:
μ = 1 при G<(GЗД - ∆/2) ;
μ = 0,5 при (GЗД - ∆/2)< G <(GЗД +∆/2) ;
μ = 0 при G>(GЗД + ∆/2) ;
Трехпозиционные регуляторы имеют существенное преимущество по сравнению с двухпозиционными регуляторами. Если при значении μСР можно установить равенство притока и оттока вещества или энергии в объекте, т.е. при µСР QПР = QРАСХ, то значение регулируемого параметра G практически не будет изменяться, т.е. будет находиться вблизи заданного значения GЗД
Пропорциональные (статические) регуляторы.
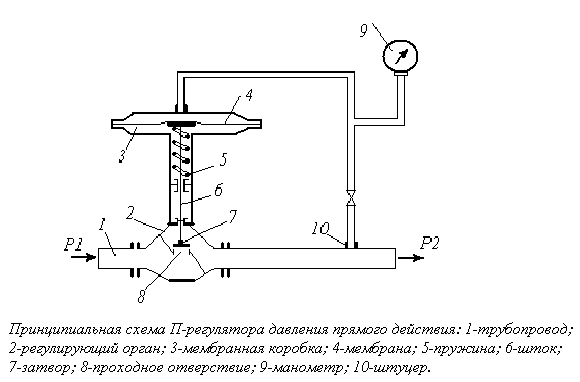
Пропорциональными (П-регуляторами) или статическими называются регуляторы, в которых перемещение регулирующего органа μ пропорционально величине отклонения регулируемого параметра от заданного значения.
-µ=S*G,
где µ − перемещение регулирующего органа;
G − изменение регулируемого параметра;
S − коэффициент пропорциональности;
Чем на большую величину отклоняется регулируемый параметр от заданного значения, тем на большую величину переместится регулирующий клапан. П-регуляторы могут регулировать параметры в пределах зоны регулирования D.
В пропорциональном регуляторе каждому значению регулируемого параметра соответствует свое строго определенное положение регулирующего органа: G1−µ1; G2−µ2;
Поэтому такие регуляторы называются еще регуляторами с отрицательной жесткой обратной связью.
С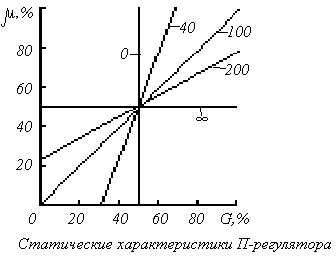 татическая
характеристика пропорционального
регулятора
татическая
характеристика пропорционального
регулятора
При D=200% изменения параметра G на 10% вызовет перемещения регулирующего органа на μ=5%.
Из-за наличия жесткой обратной связи пропорциональные регуляторы не способны поддерживать регулируемый параметр на точно заданном значении.
У пропорциональных регуляторов всегда есть остаточное отклонение регулируемого параметра от заданного значения или статическая ошибка регулирования.
Коэффициент пропорциональности S связан с пределом пропорциональности D выражением:
S=1/D*100%,
Где S - в долях единиц, D - в %.
Предел пропорциональности D – изменение регулируемого параметра, выраженное в %, соответствующее полному перемещению регулирующего органа от «открыто» до «закрыто».
Закон П-регулятора записывают в виде:
-µ=1/D *G+µ0,
где µ0 – начальное положение регулирующего органа.
Знак «-» обозначает обратное действие (когда уровень G увеличивается, то μ уменьшается, т.е. клапан прикрывается).
Предел пропорциональности D является единственным параметром настройки П-регулятора. В промышленных регуляторах D изменяется от 5 до 3000%.
П-регуляторы на возмущение регулируют практически мгновенно, то есть обладают хорошим быстродействием.
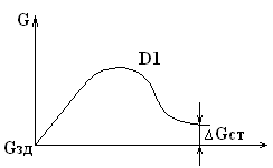
Динамическая характеристика пропорционального регулятора

Если на регулятор нанести ступенчатое возмущение, то регулирующий орган перемещается практически мгновенно на величину ∆μ – это свидетельствует о том, что П-регуляторы обладают высоким быстродействием.
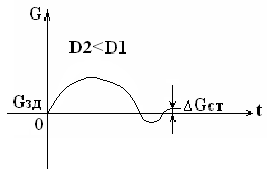
Чем меньше настраиваемый параметр регулятора D (предел пропорциональности), тем более колебательным будет переходной процесс и тем меньше по величине будет статическая ошибка регулирования ∆Gст.
Переходной процесс регулирования
D1=200%, s=0,5; D2=100%, s=1; D3=40%, s=2,5;
Апериодический переходной процесс
Переходной процесс с 20%-м перерегулированием
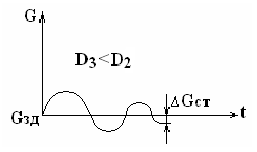
Колебательный затухающий переходной процесс
С понижением предела пропорциональности D колебания переходного процесса увеличиваются и увеличивается соответственно время регулирования. При D<5% П-регулятор превращается в двухпозиционный.
Недостаток П-регулятора: наличие статической ошибки регулирования ∆Gст.
Достоинства:
Высокое быстродействие
Дает устойчивое АСР со статическими или астатическими объектами.