

Способы автоматического регулирования гидротранспортных установок
Основной задачей автоматического регулирования гидротранспортных установок это поддержание оптимального режима работы. В общем случае это достигается при работе с такой консистенцией и скоростью движения пульпы по трубопроводу, при которых расход жидкости для перемещения насыпного груза не превышает расход, необходимый для достижения требуемой производительности по твердой фракции, при обеспечении устойчивой и надежной работы установки. При оптимальном режиме, как правило, уменьшается расход энергии на транспортирование пульпы, а также на перекачку воды для последующего ее использования.
Для одной и той же установки расход энергии зависит от потери напора на единицу длины трубопровода. В горизонтальном трубопроводе потеря напора обусловлена только сопротивлениями при движении пульпы.
Из полученной экспериментальной диаграммы рис. 15, потери напора растут с увеличением консистенции пульпы, но общий объем перекачиваемой пульпы и воды с увеличением консистенции уменьшается значительно быстрее, поэтому в общем случае рациональной является работа с гидросмесью, имеющей высокую (до известного предела) консистенцию. Потери напора для воды растут почти пропорционально скорости, а для пульпы сначала уменьшаются (до значения, при котором частицы груза в основном начинают двигаться в пульпе во взвешенном состоянии), а затем возрастают тоже почти пропорционально скорости. Таким образом, устойчивый экономический режим работы достигается при скоростях пульпы, несколько превышающих наименьшие ее значения, т. е. примерно по пересекающей прямой на рис. 15.

Рис. 15. Зависимость потерь напора от концентрации пульпы (%) и скорости ее движения
Допускаемая концентрация гидросмеси зависит главным образом от свойств перемещаемого насыпного груза. Для установки гидравлического транспорта нетяжелых и легко перемещаемых грузов (например, торфа, мелкого угля) она может быть выше, чем для трудно перемещаемых (например, руды). Если свойства груза не остаются неизменными; в этом случае изменяются потери напора и потому следует соответственно регулировать и концентрацию гидросмеси.
Рассмотрим автоматическое изменение концентрации пульпы в зависимости от действительной потери напора в горизонтальном трубопроводе, и сопротивления в нем на примере установки с естественным напором в вертикальном (или наклонном) трубопроводе (рис. 1 б).
Давление на выходе из трубопровода близко к атмосферному, следовательно, в начале горизонтального трубопровода скоростной напор выходящей струи приблизительно равен сопротивлению по всей его длине. Установленный в этом месте дистанционный манометр может служить датчиком, регистрирующим сопротивление, и через соответственную аппаратуру по кабелю передавать импульс вверх к погрузочной станции. Последняя состоит из бункера, питателя под бункером, смесительной воронки и трубопровода.
При постоянном количестве подаваемой в систему воды автоматическое регулирование концентрации пульпы может производиться изменением количества загружаемого в воронку груза, что достигается перестановкой над питателем заслонки или изменением режима работы питателя (наиболее просто это осуществляется на питателе вибрационного типа). При увеличении сопротивления в трубопроводе сверх определенного предела питатель должен уменьшать количество загружаемого в воронку груза, а при уменьшении сопротивления - увеличивать.
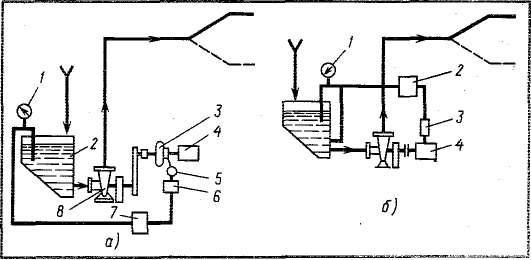
Рис. 16. Схемы гидротранспортных установок с пульпонасосом с автоматическим регулированием производительности : а - с применением гидромуфты ; б - с применением регулируемого электродвигателя
Еще одна задача регулирования гидротранспортной установки состоит в обеспечении нормального режима при неравномерном по техническим причинам поступлении твердой фракции и пульпы (например, при подаче от котлов гидросмеси со шлаками). Наиболее просто это выполняется на установке с пульпонасосом регулированием частоты вращения его рабочего колеса. Две схемы таких установок с автоматически регулируемой производительностью в зависимости от указателя уровня пульпы в резервуаре 1, из которого она засасывается пульпонасосом, показаны на рис. 16. На установке, показанной на рис. 16, а, частота вращения рабочего колеса пульпонасоса 8 изменяется регулированием гидромуфты 3, соединяющей вал колеса с коротко-замкнутым асинхронным двигателем 4; на установке, изображенной на рис. 16, б, - регулированием частоты вращения электродвигателя 4 с фазным ротором. В обоих случаях импульс для регулирования передается от указателя уровня 1 пульпы в резервуаре 2, сигнал от указателя уровня воспринимается контрольным аппаратом 7. В установке, изображенной на рис. 16, а, контрольный аппарат посылает соответствующий импульс на исполнительный механизм, изменяющий с помощью сервомотора 6 положение рычага регулятора 5 скорости ведомого вала гидравлической муфты 3.
В установке, показанной на рис. 16, б, контрольный аппарат 2 передает импульс на барабанный контролер 3, регулирующий частоту вращения двигателя 4 с фазовым ротором.
Для плавного регулирования частоты вращения рабочего колеса пульпонасоса в широком пределе можно использовать имеющую высокий КПД объемную гидропередачу. Для этой цели применяют гидротрансформаторы и установки с выпрямителем и двигателем постоянного тока.
На некоторых установках автоматическим регулированием соотношения твердого и жидкого компонентов поддерживается определенная консистенция пульпы. На установках с камерным питателем может регулироваться степень заполнения или продолжительность цикла работы питателя, а также количество нагнетаемой в трубопровод воды. Датчиками в обоих этих случаях могут служить специальные приборы для автоматического определения консистенции пульпы - консистомеры. Из них наиболее перспективны радиометрические датчики, производящие просвечивание трубопровода гамма-лучами. Действие одного из таких приборов основано на том, что при прохождении через пульпопровод гамма-лучей происходит их ослабление в зависимости от насыщенности гидросмеси твердым компонентом.