Поле р визначає пріоритет каналу. •
Другий байт BUSY визначає стан каналу:
BUSY = FFH – канал зайнятий; BUSY = OOH – канал вільний.
Наступні два слова містять сегментний і відносний компоненти адреси блоку параметрів.
Блок параметрів (РВ) може бути сформований по будь-якій адресі (ХХХХХ для каналу 1, YYYYY для каналу 2), але обов'язково в системному просторі. У перших двох словах блоку втримуються сегментний і відносний компоненти початкової адреси програми каналу. Інша частина РВ не обмежена по числу слів і служить для передачі вихідних параметрів програмі каналу.
Початкова ініціалізація СПВБ починається після системного скидання по сигналі запиту готовності каналу СА. Цей сигнал формується за Допомогою дешифратора, підключеного до системної шини адреси ЦП, без використання лінії АТ. Коли ЦП виставить адреса AADR, обраний для звертання до СПВБ, на виході дешифратора сформується сигнал СА. Значення адреси ADDR може бути обране довільно. Кожний запит готовності СА супроводжується видачею сигналу SEL, для формування якого використовується лінія АТ системної шини адреси ЦП. Таким чином, адреса ADDR, виставлений ЦП, сприймається як СА=1, SEL = 0, а адреса ADDR + 1 -як СА=1, SEL = 1. Сигнал SEL виконує різні функції на двох стадіях ініціалізації. При ініціалізації, що починається по першому (після системного скидання) сигналу СА, значення SEL визначає статус СПВБ:
SEL = 0 призначає СПВБ ведучим шини, тобто розпоряджається шиною й надає її іншим по сигналі запиту по лінії RQ/GT;
SEL= 1 призначає ВМ89 веденим, тобто він одержує шину від ЦП ВМ86 або іншого СПВБ ВМ89, виставляючи сигнал запиту на лінію RQ/GT.
При ініціалізації каналів СПВБ, що починається по другому й наступному сигналах СА (аж до перезапуску системи сигналом RESET), значення SEL визначає номер ініціалізуємого каналу:
SEL = 0 – команда видається в канал 1; SEL=1 – команда видається в канал 2.
Для виконання початкової ініціалізації СПВБ програма ЦП повинна виконати наступні дії:
1) сформувати керуючі блоки SCPB і SCB;
2) установити в блоці СВ байт BUSY1=FFH, BUSY2 = OOH;
3) видати сигнал СА, тобто виконати будь-яку команду (звичайно OUT), що пов'язана з виставлянням адреси ADDR (якщо СПВБ визначається як ведучий) або ADDR + l (якщо СПВБ визначається як ведений);
4) очікувати установки байта BUSY1 у нуль.
По зрізі сигналу СА процесор уведення – виводу автоматично виконує наступні дії:
1) уводить байт SYSBUS з адреси FFFF6H і настроюється, на задану ширину СШ;
2) формує адреса SSSSS блоку SCB з покажчика, розміщеного в FFFF8H і FFFFAH;
3) уводить байт S0C і SCB, визначаючи ширину ШВВ і режим лини:
RO/GT;
4) формує адреса LLLLL блоку СВ із покажчика, розміщеної в SSSSS і SSSSS + 2, і запам'ятовує його в регістрі СРР загального КП;
5) установлює байт BUSY1 у нуль;
6) очікує від ЦП наступного запиту готовності СА.
На цьому закінчується початкова ініціалізація СПВБ. При наявності у системі декількох СПВБ центральний процесор ініциалізує їх до черги, користуючись тією ж процедурою ініціалізації й тими ж областям: пам'яті для блоків SCPB і SCB. Природно, перед початкової ініціализацією кожного СПВБ центральний процесор повинен модифікувати блок SCB, тому що кожний СПВБ повинен мати свій блок СВ керування каналам і, можливо, свої ширину ШВВ і статус.
У результаті початкової ініціалізації СПВБ одержує інформації про фізичну ширину СШ і ШВВ, запам'ятовує адреса свого керуючого блоку (LLLLL на мал. 4.11), визначає свій статус і переходить до режиму; очікування команди каналам, називаному режимом простоювання.
Для виконання ініціалізації каналів СПВБ ЦП повинен виконує наступні дії.
1. Сформувати блоки СВ керування каналами. Помістити сегменти! і відносний компоненти адреси блоку параметрів за адресою LLLLL+ 2 LLLLL + 4 для каналу 1 або LLLLL + A, LLLLL + C для каналу 2. Завантажить: байт CCW1 командою для каналу 1 або CCW2 командою для каналу 2.
2. Підготувати блок параметрів РВ для відповідного каналу. У перші два слова РВ помістити сегментний і відносний компоненти початкової адреси програми каналу. У наступну область – параметри, необхідні для виконання програми. Параметри каналу визначаються користувачем і можуть містити або значення параметрів, або їхньої адреси в пам'яті (у вигляді сегментного й відносного компонентів).
3. Якщо байт CCW ініціалізуємого каналу містить команду «за пустити» програму каналу, то ЦП повинен очікувати скидання байта BUSY перш ніж перейти до наступної дії.
4. Видати СА, тобто виконати будь-яку команду, що пов'язана з виставленням адреси ADDR (якщо ініціалізується канал 1) або ADDR + 1 (якщо ініціалізується канал 2).
По зрізі сигналу СА процесор уведення – виводу виконує наступні дії:
1) аналізує сигнал SEL і встановлює байт BUSY1=FFH (npi SEL = 0) або BUSY2 = FFH (при SEL = 1);
2) завантажує байт CCW1 з адреси LLLLL + 0 (при SEL = 0) чи CCW2 з адреси LLLLL+ 8 (при SEL = 1);
3) декодує байт керування каналом і починає виконувати дії відповідно до кодів керуючих полів.
Використання СПВВ у місцевій і вилученій конфігурації має cboї особливості.
У місцевій конфігурації (мал. 4.13) процесори ВМ86 і ВМ89 спільно використовують загальну шину.
Тимчасові діаграми, що пояснюють використання сигналу RQ/GT для запиту/надання шини, наведені на мал. 4.14. Коли один із процесорів використовує шину, іншої переводить свої виходи стану S2 – S0 і адреси/дані у високоомний стан. Формування шини керування, адреси й даних здійснюється схемою шинного інтерфейсу, що складає із системного контролера К1810ВГ88, трьох фіксаторів адреси К580ИР82 і двох шинних формувачів К1810ВА86.
У місцевій конфігурації використовується загальний генератор тактових імпульсів К1810ГФ84, що здійснює синхронізацію роботи процесорів, формує сигнали їхньої початкової установки й синхронізує сигнали готовності від зовнішніх пристроїв. Для формування сигналу запиту готовності СА використовується дешифратор адресних ліній А15 – А1, що


спрацьовує по команді OUT ADDR або OUT ADDR + 1, де ADDR – адреса, виділена для ВМ89.
Значення сигналу SEL формується на адресній лінії АТ. Часи установки й утримання сигналу SEL стосовно зрізу сигналу СА показані на мал. 4.15, а. Сигнали запитів переривань із виходів SINTR1, SINTR2 процесори ВМ89 подаються на вхід INTR BM86 через програмувальний контролер переривань. На мал. 4.15,6 показана затримка сигналів SINTR1, SINTR2 стосовно зрізу сигналу CLK.

Сигнали запитів прямого доступу DMQ від зовнішніх пристроїв, що беруть участь у Пдп-Пересиланнях, подаються безпосередньо на входи DRQ1, DRQ2 процесори ВМ89. Якщо пристроїв, що запитують ПДП, більше двох, їхні виходи DMQ можуть бути об'єднані на схемі АБО. Аналогічно, сигнали INT, що вимагають закінчення Пдп-Пересилання, підключаються до входів ЕХТ1, ЕХТ2 процесори ВМ89. Часи установки сигналів DRQ1, DRQ2 і ЕХТ1, ЕХТ2 (мал. 4.15, в, г) установлюються такими, щоб вони розпізнавалися пристроєм керування уведенням – виводом у наступному такті CLK.
Схема включення СПВБ у місцевій конфігурації, показана на мал. 4.13, не є єдиною. Оскільки ЦП ВМ86/ВМ86 має дві лінії RQ/GT, до нього можна безпосередньо підключити більше одного співпроцесора. На мал. 4.16 показана місцева конфігурація, що включає співпроцесор ВМ87 і СПВБ ВМ89, які разом із ВМ86 використовують загальну шину. Тому що лінія RQ/GT0 BM86 має пріоритет стосовно RQ/GT1, то при одночасних запитах шини від ВМ89 і ВМ87 перевага віддається процесору ВМ89. Але якщо в момент запиту шину використовує співпроцесор ВМ87, то запит ВМ89 не буде підтверджуватися до звільнення шини ВМ87. На мал. 4.16 (штриховою лінією) показаний варіант включення другого СПВБ ВМ89, лінія RQ/GT

якого підключена до лінії RQ/GT1 співпроцесора ВМ87. При такому включенні запит шини від ВМ89 змусить ВМ87 звільнити її після поточного циклу, якщо навіть йому потрібно ще кілька циклів шини для завершення поточної команди.
Перевага використання СПВБ у місцевій конфігурації полягає в тому, що з'являється можливість здійснювати в системі «розвинені» Пдп-Пересилання при мінімальних додаткових витратах (досить підключити один ВМ89). Недоліки місцевої конфігурації – обмеження можливості паралельної роботи ВМ86 і ВМ89. Дійсно, паралельна обробка можлива тільки в ті періоди часу, коли ВМ86 виконує команди зі своєї черги, не потребуючі використання шини.
У вилученій конфігурації (мал. 4.17) СПВБ ВМ89 може використовувати системну шину, що є загальною для всіх процесорних модулів системи. Обігу ВМ89 до СШ управляються арбітром шини К1810ВБ89, пов'язаним з арбітрами інших модулів по шині арбітражу. Крім системної шини СПВБ завжди доступна локальна шина (ЛШ), що фізично відділена від СШ. У вилученій конфігурації СПВБ може звертатися до ПВВ і пам'яті, підключеним К ЛШ, не «відволікаючи» ВМ86, що використовує для цього СШ. Найбільша незалежність СПВБ від ЦП досягається, коли програми каналу розміщені в локальній пам'яті (підключеної К ЛШ) і при добуванні команд ВМ89 також не відволікає ВМ86. У системній пам'яті в цьому випадку розташовується тільки список із чотирьох керуючих блоків SCPB, SCB, СВ і РВ. Таким чином, у вилученій конфігурації можна реалізувати дійсно паралельну роботу ВМ89 і ВМ86, що істотно збільшує продуктивність системи.
У схемі мал. 4.17 використовується дві схеми шинного інтерфейсу: для обігу СПВБ К СШ і К ЛШ. Схема шинного інтерфейсу СШ включає системний контролер К1810ВГ88, трьох фіксатора адреси К580ИР82 і двох шинного формувача К1810ВА86. Схема шинного інтерфейсу ЛШ ідентична, але містить два фіксатори адреси, тому що простір адрес ЛШ відповідає простору уведення – виводу й обмежено ємністю 64 К. Для поділу адрес системного простору й простору уведення – виводу використовується сигнал CEN, що виробляється дешифратором адрес і надходить на керуючий вхід системних контролерів, як показано на мал. 4.17. Коли ВМ89 виставляє адресу, що ставиться до простору уведення – виводу, що відповідає контролер забезпечує доступ К ЛШ, оскільки на його вході AEN = 0. Коли ВМ89 вимагає доступу К СШ, те відповідний контролер надає його тільки в тому випадку, якщо арбітр К1810ВБ89 сформує сигнал AEN = 0.
Коли ВМ89 здійснює Пдп-Пересилання, що вимагає монопольного використання СШ (наприклад, звертання К загальної бази даних), сигнал LOCK забезпечує таку можливість. Тимчасові характеристики сигналу LOCK представлені на мал. 4.18.

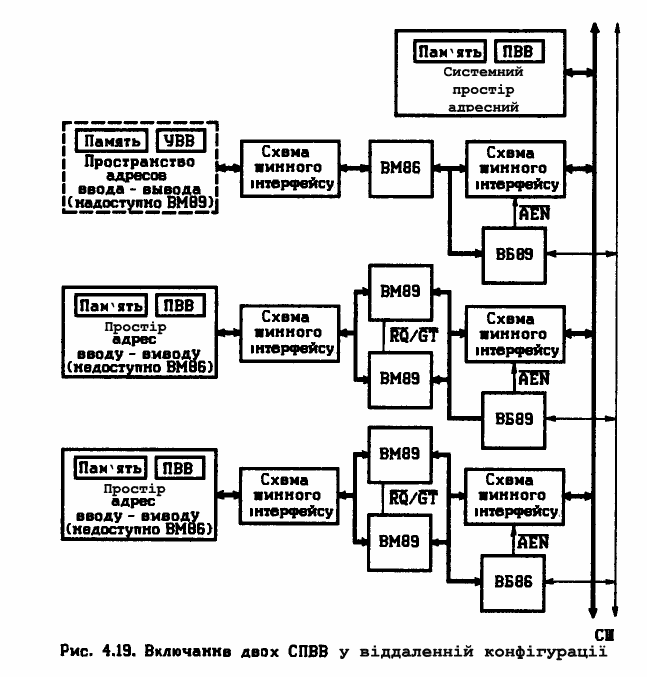
Включення СПВБ у вилученій конфігурації не вичерпується схемою мал. 4.17. Вона може бути доповнена вилученими процесорними модулями двох СПВБ, що здійснюють локальний арбітраж шин по лінії RQ/GT (мал. 4.19) і обслуговуючими ПВВ, розміщені в просторі уведення – виводу, недоступному ЦП. У свою чергу, ЦП може через схеми шинного інтерфейсу звертатися в простір уведення – виводу, недоступне СПВБ. На мал. 4.20 представлена схема із двома процесорами ВМ86, де один СПВБ використовується в місцевій конфігурації з одним ВМ86 і у вилученій стосовно іншого. Місцевий ВМ86 відіграє допоміжну роль, виконуючи всілякі обчислювальні програми для ВМ89, у тому числі обробку переривань без зниження продуктивності основного ВМ86.

Незалежно від того, у якій конфігурації використовується СПВБ, формування сигналів керування, адрес і даних відповідає тій же структурі шини, що й у ЦП ВМ86/ВМ88. Тимчасові діаграми, що описують роботу ВМ89, наведені на мал. 4.21. Адреси мультиплексуються з даними на перших 16/8 лініях AD15 – AD0/AD7 – AD0. Адреси А19 – А16 мультиплексуються в часі із сигналами станів S6 – S3. Під час циклів роботи ВМ89 сигнали S4 і S3 визначають, який з каналів виконує Пдп-Перисилку, а сигнали S6 S5=ll дозволяють визначити, що цикл шини виконує
ВМ89, а не ВМ86/ВМ87/ВМ88. Перші три сигнали стану S2 – S0 використовуються контролером К1810ВГ88 і арбітром К1810ВБ89 для керування ЛШ і СШ. Пдп-Пересилання вимагає, принаймні, два цикли шини, кожний з яких займає не менш чотирьох тактів (якщо буде потреба додаються такти очікування TW). Подібний підхід (із двома циклами) значно полегшує вимоги до тимчасових співвідношень між сигналами. На мал. 4.21 показані також сигнали, вироблювані генератором тактових імпульсів К1810ГФ84 і контролером К1810ВГ88 у режимах читання й запису. При використанні 8-бітової фізичної шини дані сигнали А15 – А8 не мультиплексуються з даними при записі й не переходять у високоомний стан при читанні. На відміну від ВМ86, у якому сигнал ПОЗА мультиплексується із сигналом S7, сигнал ПОЗА ВМ89 не мультиплексується й не вимагає запису у фіксатори адреси.