

Lektsiyi_7-15
.pdfОтже,
√ |
|
(12.13) |
|
Величину, яка СТОЇТЬ у правій частині (12.13), називають граничною гнучкістю і позначають гр. Так, для Ст3 маємо σпц = 200МПа, а E=2*105МПа,
ТОДІ
гр=√
Якщо гнучкість стержня менша від г р , то формулами Ейлера (12.11) і (12.12) користуватись не можна. Так, для сталі Ст3 при гнучкостях 405≤ <100 критичне напруження визначається за емпіричною формулою Ясинського
(12.14)
де α=310 МПа, b = 1,14 МПа — коефіцієнти, які визначаються з дослідів.
При гнучкостях |
<40 |
за |
критичне |
напруження |
приймається |
||||
σТ=240МПа. |
|
|
|
|
|
|
|
|
|
Отже, для стержнів з матеріалу Ст3 з малою гнучкістю ( |
<40) σкр = σТ; з |
||||||||
середньою гнучкістю (40≤ < |
100) |
|
; з великою гнучкістю |
||||||
( ≥100) |
. |
Графік |
залежності |
σкр |
від |
для |
стержнів з |
||
маловуглецевої |
сталі |
Ст3 |
зображено |
на |
рис. |
12.3. |
|||
Лекція 13
КОЛИВАННЯ СИСТЕМ З ОДНИМ СТУПЕНЕМ ВІЛЬНОСТІ
13.1 Основні поняття теорії коливань
Пружні системи, що зазнають коливань, поділяються за числом ступенів вільності. Числом ступенів вільності називається кількість незалежних координат, що визначають положення мас системи.
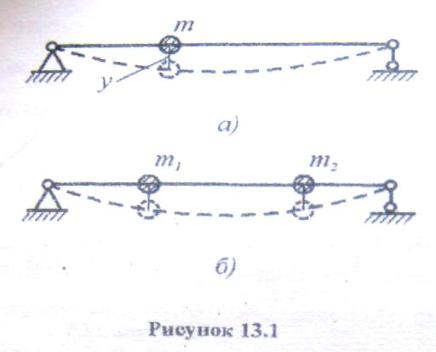
Наприклад, проста балка з прикріпленим до неї вантажем з масою т (рис. 13.1 а), вісь якої коливається у вертикальній площині, буде системою
зодним ступенем вільності, коли масою балки можна нехтувати порівняно
змасою вантажу. Положення вантажу при коливаннях визначається лише однією координатою — переміщенням у його центр ваги відносно положення рівноваги. Аналогічно, балка з двома прикріпленими до неї
вантажами з масами m1, і m2 (рис. 13.1 б), буде системою з двома ступенями вільності.
Залежно від характеру сил, що підтримують коливання, розрізняють вільні і вимушені коливання. Вільними називаються коливання, що відбуваються під дією одних лише сил пружності системи. У реальних умовах вільні коливання внаслідок дії сил опору поступово затухають і система приходить у стан спокою. Вимушені коливання відбуваються при активній дії зовнішніх сил, здебільшого періодичних, які підтримують коливальний рух. Залежно від напрямку коливань відносно осі стержня розрізняють його поздовжні, поперечні і крутильні коливання.

13.2 Вільні коливання балки з одним ступенем вільності
Розглянемо вільні коливання системи з одним ступенем вільності, наприклад, невагомої балки з прикріпленим до неї вантажем вагою Р (рис.13.2 а). Під дією ваги Р балка зігнеться і вантаж зміститься вниз на величину
(13.1)
де с — жорсткість балки.
Приймемо координатну вісь ОY з початком у центрі ваги вантажу після його статичного переміщення. Якщо вантаж змістити вниз на величину у і потім відпустити, то він почне коливатися під дією пружної реакції балки відносно рівноважного положення О, яке він займав при статичній деформації балки.
Нехай у довільний момент часу t вантаж рухається вниз. На нього діє сила Р напрямлена вниз і сила пружної реакції балки Fпр напрямлена вгору (рис.13.2 б). За другим законом Ньютона
̈ |
( |
) |
(13.2) |
де |
( |
). |
Підставляючи (13.1) в (13.2), одержимо
̈ |
(13.3) |

Одержане рівняння — це диференціальне рівняння вільних коливань системи з одним ступенем вільності. Вводячи позначення
(13.4)
запишемо рівняння (13.3) у вигляді
̈ |
(13.5) |
Загальний розв'язок цього рівняння
( ) (13.6)
де А, — довільні сталі інтегрування.
Це рівняння називається рівнянням вільних коливань системи. Графік цих коливань показаний на рис. 13.2, б.
Стала А, тобто величина найбільшого відхилення вантажу від рівноважного положення, називається амплітудою коливань, стала — їх початковою фазою. З рівняння (13.6) видно, що переміщення у повторюється через проміжок часу Т що називається періодом коливань i
|
|
|
|
|
|
|
|
(13.7) |
|
= 2 / Т , що є числом коливань системи за 2 |
|||||||
Величина |
секунд, |
|||||||
називається коловою частотою коливань. |
|
|||||||
На основі залежності (13.4) видно, що |
|
|||||||
|
|
√ |
|
|
|
(13.8) |
||
|
|
|
|
|
|
|||
|
|
|
||||||
і не залежить від початкових умов. |
|
|||||||
Враховуючи, |
що m=P/g і с = Р/ , можна колову частоту вільних |
|||||||
коливань записати так |
|
|||||||
|
√ |
|
|
(13.9) |
||||
|
|
|
|
|
||||
|
|
|||||||
Формули (13.8), (13.9) справедливі як для поздовжніх, так і для крутильних вільних коливань систем з одним ступенем вільності.
13.3 Вимушені коливання систем з одним ступенем вільності
Сила, що викликає вимушені коливання, називається збурюючою силою. Нехай збурююча сила прикладена до системи в тому ж перерізі, де прикріплений вантаж Р, і величина ЇЇ змінюється за законом
( ) |
, |
|
де H — найбільше значення збурюючої сили, |
— її колова частота. |
|
Диференціальне рівняння вимушених коливань системи з одним |
||
ступенем вільності має вигляд |
|
|
̈ |
|
(13.10) |
Частковий розв'язок цього рівняння шукаємо у вигляді |
||
|
. |
(13.11) |
Підставимо (13.1) в (13.10). Одержимо рівність |
||
( |
) |
, |
яка перетворюється на тотожність, коли
( )
З останнього рівняння знаходимо
( )
Одержану формулу для амплітуди вимушених коливань можна записати
(13.12)
де β називається коефіцієнтом зростання коливань і |
|
. |
(13.13) |
( )

Коли → , тобто при резонансі, коефіцієнт β, а разом з ним і
амплітуда вимушених коливань необмежено зростають. У реальних умовах амплітуда вимушених коливань при резонансі не зростає необмежено внаслідок наявності сил опору.
Максимальне динамічне переміщення |
|
можна зобразити як суму |
||||||||
статичного переміщення ст від дії сили |
Р і амплітуди вимушених |
|||||||||
коливань |
|
|
||||||||
|
|
|
|
|
|
|
|
( |
|
), |
|
|
|
|
|||||||
або |
|
|
||||||||
де кд — динамічний коефіцієнт, що дорівнює |
|
|
||||||||
|
|
|
|
|
|
|
|
|
(13.14) |
|
|
|
|
|
|
|
|
|
|
||
Оскільки в межах справедливості закону Гука напруження пропорційні деформаціям, то при вимушених коливаннях динамічне напруження σд дорівнює
|
(13.15) |
а умова міцності має вигляд |
|
[ ] |
(13.16) |

Лекція 14
УДАРНІ НАВАНТАЖЕННЯ. ДИНАМІЧНИЙ КОЕФІЦІЄНТ ПРИ УДАРІ
14.1 Основні поняття і припущення
Ударним навантаженням називають навантаження, яке передається на тіло протягом малого проміжку часу і викликає значні прискорення в тілі, що зазнає удару.
Розрахунок на дію ударного навантаження проводиться у так званій технічній теорії удару, в основу якої покладені такі припущення:
1.Під час удару виникають тільки пружні деформації, тобто після припинення дії ударного навантаження тіло повертає свої початкові форму і розміри.
2.Для ударного навантаження матеріалу розраховуваного елемента конструкції дійсний закон Гука.
3. Удар вважають абсолютно непружним, тобто ударний вантаж після удару не відскакує від пружної системи, а продовжує в процесі дії деформації рухатися разом з нею.
4.Маса пружної системи, яка приймає удар, мала порівняно з масою ударного тіла, і тому масою пружної системи можна нехтувати.
5.Робота падаючого (ударного) тіла повністю переходить у потенціальну енергію деформації елемента конструкції, який сприймає дію удару.
На основі цих припущень визначимо напруження і деформації, що виникають у стержневих елементах при ударі.
14.2 Поздовжній удар
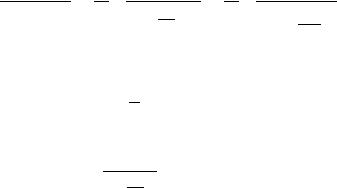
Розглянемо систему, яка складається з вертикального пружного стержня і вантажу Q, який падає на цей стержень (рис. 14.1, а).
Розглянемо два випадки:
1)вантаж Q прикладається до стержня статично і стискає стержень на
величину (рис. 14.1, б); 2) вантаж падає на стержень з висоти к і стискає стержень на величину
(рис. 14.1, в).
Зміна деформації стержня при ударному навантаженні Q порівняло з деформацією при статичній дії сили Q характеризується коефіцієнтом динамічності
(14.1)
З фізичних міркувань очевидно, що кд > 1.
Враховуючи лінійний зв'язок між напруженнями і деформаціями по аналогії з формулою (14.1) одержимо
(14.2)
де
|
|
|
|
|
|
|
|
|
(14.3) |
|
— напруження, що виникає в стержня при статичній дії сили Q. |
||||||||||
|
||||||||||
За законом Гука |
|
|||||||||
|
|
|
|
; |
|
|
|
|
(14.4) |
|
|
|
|
|
|
|
|||||
На основі закону збереження енергії робота, яку виконує вантаж під час падінні дорівнює потенціальній енергії деформації стержня:

( |
д) |
|
д д |
(14.5) |
|
де Nд — найбільша величина динамічної сили при ударі.
З (14.4) визначаємо і підставляємо в (14.5)
; |
( |
д) |
|
|
д |
|
|
|
|
|
або
( |
д) |
; |
( |
) |
(14.6) |
|
|
Одержаний вираз перепишемо так |
|
|
|
д |
|
|
(14.7) |
Звідси знаходимо динамічну деформацію |
|
||
|
|
|
|
д |
√ |
(14.8) |
|
Так як знак мінус не відповідає фізичному змісту задачі, то в (14.8)
беремо знак плюс.
Враховуючи (14.1), знаходимо коефіцієнт динамічності
√ |
|
(14.9) |
|
Оскільки h = (V — швидкість вантажу в момент удару), то коефіцієнт динамічності можна визначати ще так:
√ |
|
(14.10) |
|
Звернемо увагу, що при h = 0, тобто, коли сила прикладається миттєво, то з (14.9) або з (14.10) одержимо kд= 2. Отже, при динамічному навантаженні стержня переміщення, зусилля і напруження у два рази більше від відповідних статичних величин.
Використовуючи формулу (14.2), визначимо динамічні напруження при ударі
( √ |
|
) |
|
( √ |
|
) . |
(14.11) |
|
|
|
14.3 Поперечнийудар
При поперечному ударі залишаються чинними формули (14.9-14.11), одержані для поздовжнього удару, якщо в них під розуміти статичний прогин балки.
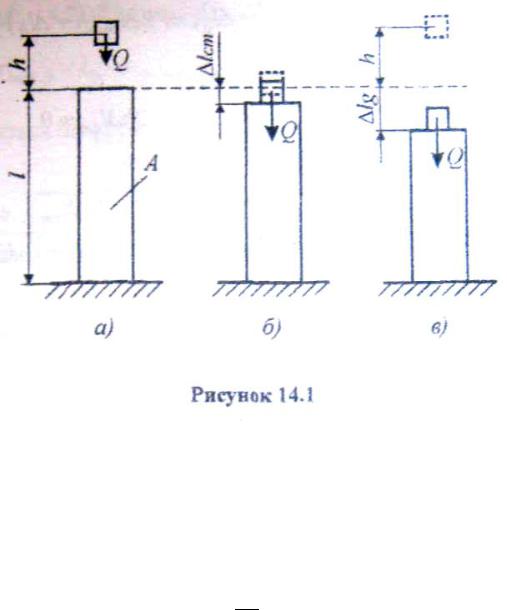
Наприклад, при ударному навантаженні силою Q, що падає з висоти h на кінець балки (рис. 14.2), будемо мати
де kд обчислюється за формулою (14.9), а |
|
, наприклад, за способом |
|||||||||||||
Верещагина |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
( |
) |
|
( |
|
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|||||||||