

Короткі теоретичні відомості
Довільну
систему сил, прикладених до абсолютно
твердого тіла, можна звести до однієї
сили
![]() ,
яка дорівнює головному вектору системи
сил і прикладена в центрі зведенняО,
і однієї пари з моментом
,
яка дорівнює головному вектору системи
сил і прикладена в центрі зведенняО,
і однієї пари з моментом
![]() ,
який дорівнює головному моменту системи
сил відносно центраО.
,
який дорівнює головному моменту системи
сил відносно центраО.
Головним
вектором системи сил
називається величина
![]() ,
що дорівнює геометричній сумі всіх сил
системи;головним
моментом системи сил
відносно центра О
називається величина
,
що дорівнює геометричній сумі всіх сил
системи;головним
моментом системи сил
відносно центра О
називається величина
![]() ,
що дорівнює сумі моментів всіх сил
відносно цього центраО:
,
що дорівнює сумі моментів всіх сил
відносно цього центраО:
![]() ;
;
![]() .
.
Звідси
необхідні й достатні умови рівноваги
будь-якої системи сил виражаються
рівностями
![]() ,
тобто її головний вектор і головний
момент відносно будь-якого центра
дорівнюють нулю.
,
тобто її головний вектор і головний
момент відносно будь-якого центра
дорівнюють нулю.
Оскільки
вектор
![]() дорівнює нулю, то дорівнюють нулю його
проекціїRx
і Ry,
тобто повинні виконуватись рівності:
дорівнює нулю, то дорівнюють нулю його
проекціїRx
і Ry,
тобто повинні виконуватись рівності:
Rx=0,
Ry=0
та
![]() ,
,
де М0 – алгебраїчний момент сили, а О – будь-яка точка в площині дії сил.
Ці рівності будуть виконуватись тоді, коли:
![]() .
.
Ці формули виражають аналітичні умови рівноваги: для рівноваги довільної плоскої системи сил необхідно і достатньо, щоб суми проекцій всіх сил на кожну з двох координатних осей і сума їх моментів відносно будь-якого центра, що лежить у площині дії сил, дорівнювали нулю.
Одночасно ці рівності виражають умови рівноваги твердого тіла, яке перебуває під дією плоскої системи сил.
Методами статики можуть розв’язуватись задачі таких двох типів:
1) в яких відомі сили, прикладені до тіла, і вимагається з’ясувати, в якому положенні та при яких співвідношеннях між силами тіло буде перебувати у рівновазі;
2) в яких наперед відомо, що тіло перебуває у рівновазі, і треба з’ясувати, чому дорівнюють сили, що діють на тіло.
Реакції в’язей є величинами, наперед невідомими.
Всі розрахунки в задачі слід виконувати в загальному вигляді (аналітично),числа підставляються тільки в кінцеві результати. Це дає змогу проаналізувати здобуті результати.
Геометричним методом зручно користуватись, коли кількість сил (і заданих, і шуканих), прикладених до твердого тіла, дорівнює трьом.
Аналітичним методом користуються при будь-якій кількості сил. Для того, щоб дістати простіші рівняння необхідно:
а) складаючи рівняння проекцій сил, проводити координатну вісь перпендикулярно якій-небудь невідомій силі;
б) складаючи рівняння моментів, брати за центр моментів точку, де перетинаються більше невідомих сил.
Розв’язок багатьох задач статики зводиться до визначення реакцій опор. У техніці зустрічаються три типи опорних закріплень.
1.
Рухома шарнірна опора
А
(рис.11). Реакція
![]() такої опори напрямлена по нормалі до
поверхні, на яку спираються котки рухомої
опори.
такої опори напрямлена по нормалі до
поверхні, на яку спираються котки рухомої
опори.
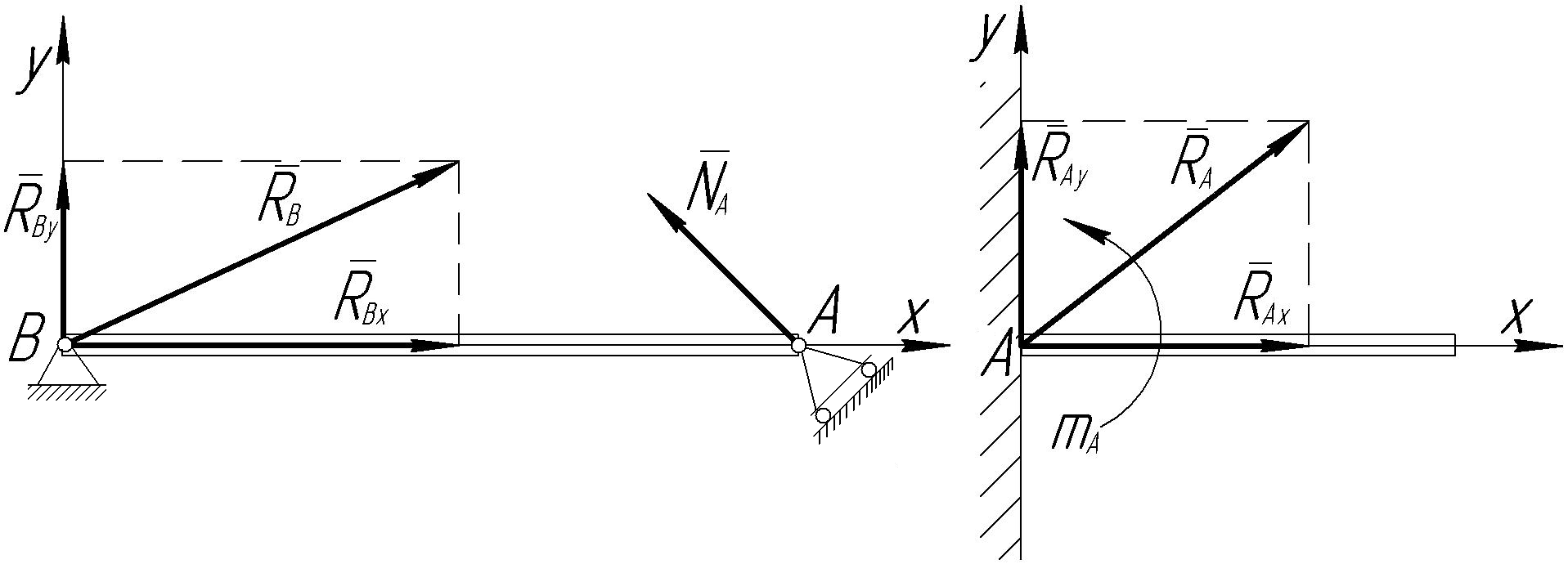
Рис.11 Рис.12
2.
Нерухома шарнірна опора
В
(рис.11). Реакція
![]() такої опори проходить через вісь шарніра
і може мати будь-який напрямок у площині
креслення. Реакцію
такої опори проходить через вісь шарніра
і може мати будь-який напрямок у площині
креслення. Реакцію![]() будемо зображати її складовими
будемо зображати її складовими![]() і
і![]() по напрямках координатних осей. Якщо
визначимо їх, то:
по напрямках координатних осей. Якщо
визначимо їх, то:
![]() .
.
3.
Жорстке защемлення (нерухома защемляюча
опора)
(рис.12). Тут система реакцій зводиться
до реакції
![]() ,
яка може бути розкладена на
,
яка може бути розкладена на![]() та
та![]() ,
і пари з моментомmA.
Таким чином, для визначення реакції
нерухомої защемляючої опори треба
знайти три величини
,
і пари з моментомmA.
Таким чином, для визначення реакції
нерухомої защемляючої опори треба
знайти три величини
![]() ,
,![]() таmA.
таmA.