

З
До задачі 7.9
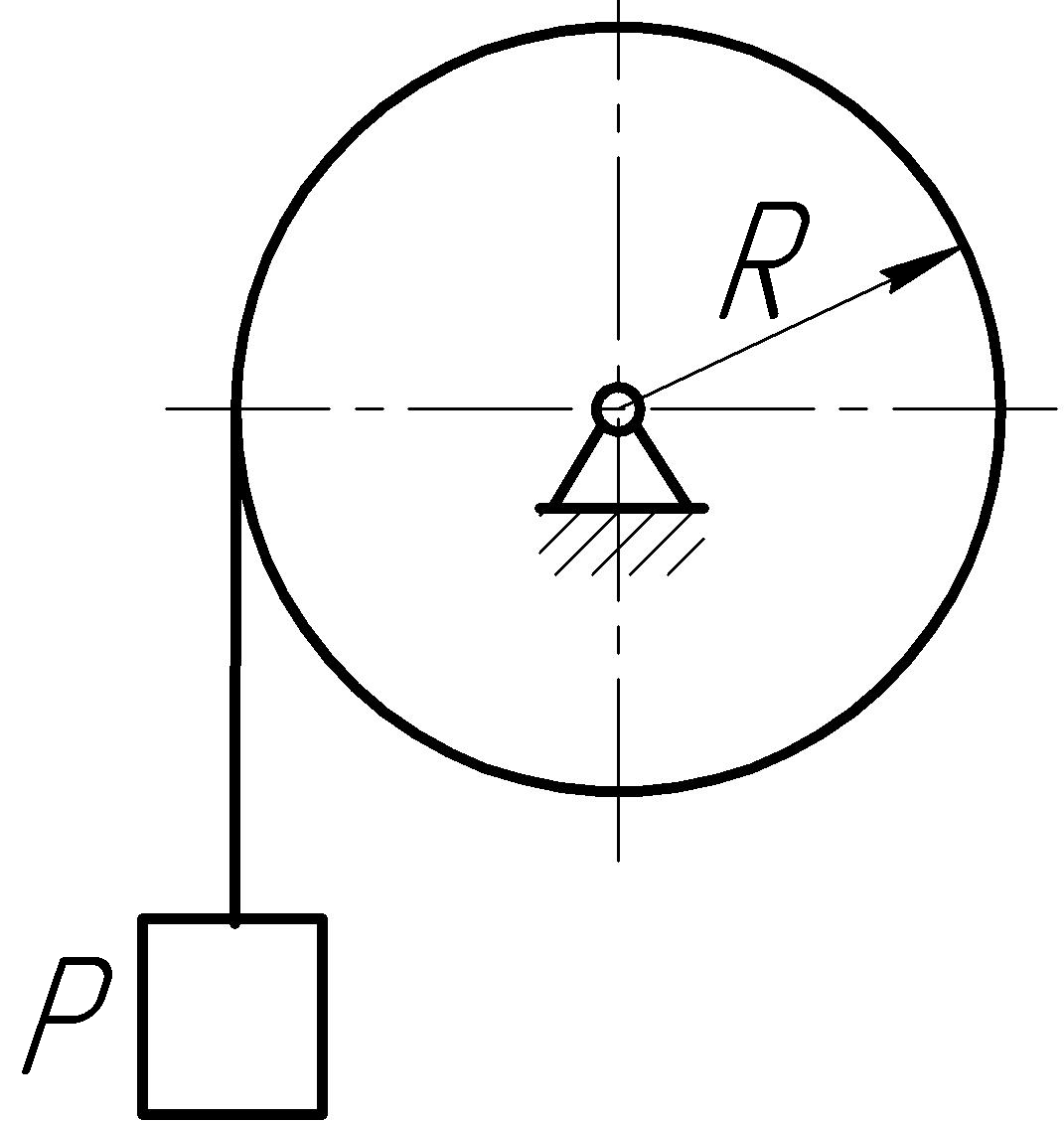
адача 7.9.
Вал радіусом R=10см
приводиться в обертання гирею Р,
підвішеною до нього на нитці. Рух гирі
визначається рівнянням
![]() ,
дех
– відстань від місця сходження нитки
з поверхні вала, виражена в сантиметрах,
t
– час у секундах.
Визначити кутову швидкість ω
і кутове прискорення ε
вала, а також повне прискорення а
точки на поверхні вала в момент t.
,
дех
– відстань від місця сходження нитки
з поверхні вала, виражена в сантиметрах,
t
– час у секундах.
Визначити кутову швидкість ω
і кутове прискорення ε
вала, а також повне прискорення а
точки на поверхні вала в момент t.
Відповідь:
ω=20t
![]() ,
ε=20
,
ε=20
![]() ,
,
![]() .
.
Задача 7.10. Махове колесо радіусом R=0,5м обертається рівномірно навколо своєї осі; швидкість точок, що лежать на його ободі, дорівнює 2м/с. Скільки обертів за хвилину робить колесо?
Відповідь: п=38,2об/хв.
Практичне заняття №8 Тема: Плоскопаралельний рух твердого тіла. Складний рух точки та тіла Програмні питання
Плоскопаралельний рух твердого тіла, рівняння руху. Визначення швидкості та прискорення точок плоскої фігури. Миттьовий центр швидкостей і прискорень.
Складний рух точки. Абсолютний, відносний і переносний рухи. Визначення швидкості й прискорення точки в складному русі. Прискорення Коріоліса. Складний рух твердого тіла. Додавання поступальних рухів. Додавання обертальних рухів навколо двох паралельних та перетинних осей.
Література
Курок В.П. Технічна механіка. Курс лекцій: навч. посіб. для студ. вищих навч. закл. – К.: Пед. преса, 2007. – 272с., л.13, л.14, л.15.
Курок В.П. Технічна механіка. Розділ: Кінематика: навч. посібник. – К., 2004. – 90 с., §§10 – 17.
Тарг С.М. Краткий курс теоретической механики. – М.: Высшая школа, 1986. – 416с., §§52 – 59.
Никитин Е.М. Краткий курс теоретической механики. – М.: Наука, 1983. – 400с., §§59 – 65.
Цасюк В.В. Теоретична механіка: Навчальний посібник. – К.: Центр навчальної літератури, 2004. – 402с., §§10.1 – 10.6, 12.1 – 13.3.
Мещерский И.В. Сборник задач по теоретической механике. – М.: Наука, 1986. – 448с.
Короткі теоретичні відомості
Плоскопаралельний рух твердого тіла. Плоскопаралельним рухом або плоским рухом твердого тіла називається такий рух, в якому всі його точки переміщаються паралельно деякій нерухомій площині. Такий рух спостерігається в багатьох механізмах і машинах, наприклад, рух шатуна в кривошипно-повзунковому механізмі, рух колеса, яке котиться по прямолінійній ділянці. Обертальний рух тіла можна розглядати частковим випадком плоскопаралельного руху.
В
Рис.28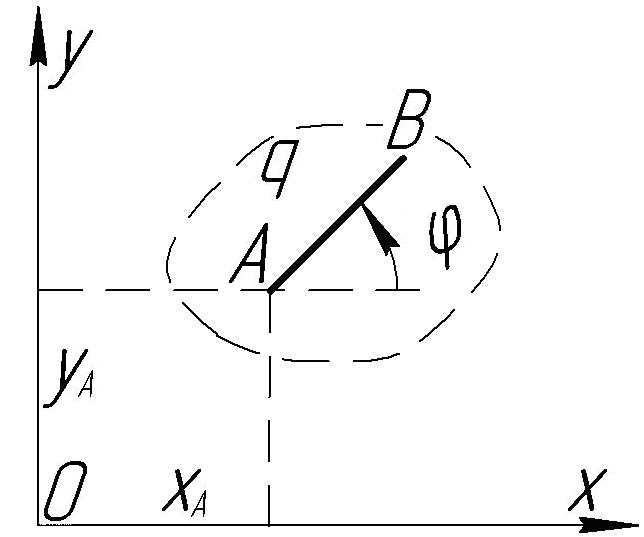
У свою чергу положення відрізка АВ можна визначити через координати хА, уА точки А і кутом φ, який він утворює з віссю х. Довільно обрана точка А для визначення положення фігури називається полюсом.
Оскільки координати хА, yА і кут φ будуть змінюватися з часом, то для визначення положення тіла в будь-який момент часу треба знати залежності:
xа=f1(t), уА=f2(t), φ=f3(t).
Ц
Рис.
29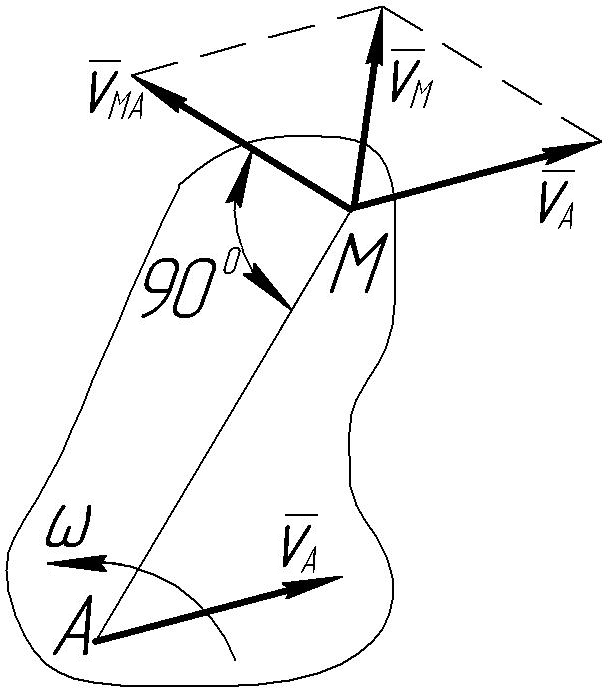
Швидкість будь-якої точки М тіла у його плоскопаралельному русі дорівнює геометричній сумі швидкості будь-якої іншої точки А, обраної за полюс, і швидкості точки М в її обертальному русі разом з тілом навколо цього полюса (див. рис.29):
![]() .
.
Величина
швидкості
![]() обчислюється за формулою:
обчислюється за формулою:
vMA=ω АМ.
Вектор
![]() напрямлений
перпендикулярно
до АМ.
напрямлений
перпендикулярно
до АМ.
П
Рис.
30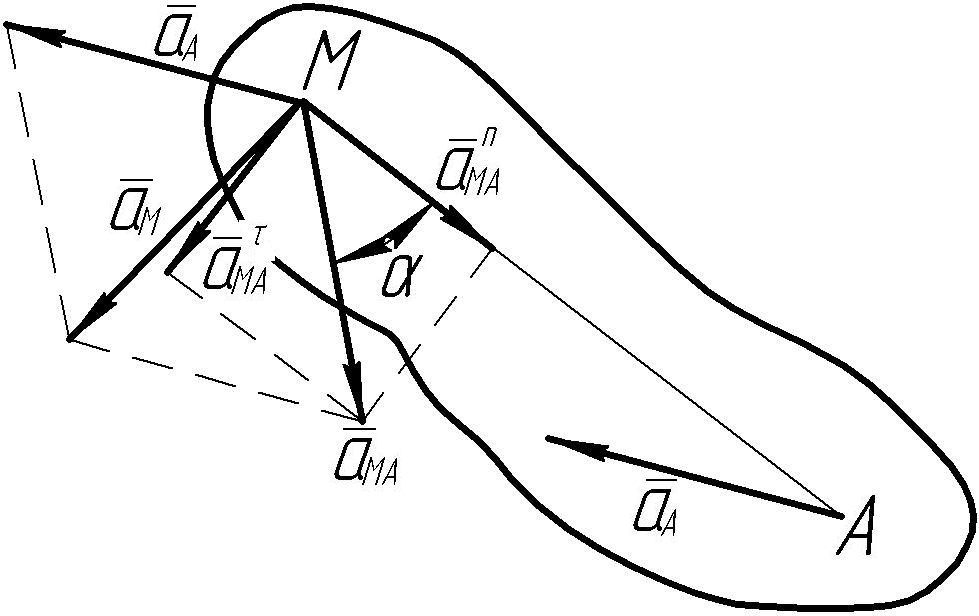
![]()
Скориставшись формулами для обертального руху, маємо:
![]()
При
розв’язанні задач часто зручнішим є
заміна вектора
![]() його дотичною
його дотичною![]() і нормальною
і нормальною![]() складовими,
де
складовими,
де
![]() =АМ·ε,
=АМ·ε,
![]() =АМ·ω2.
=АМ·ω2.
Вектор
![]() напрямлений
перпендикулярно відрізку
АМ
у бік обертання, коли воно прискорене,
і в протилежний бік, коли воно сповільнене.
Вектор
напрямлений
перпендикулярно відрізку
АМ
у бік обертання, коли воно прискорене,
і в протилежний бік, коли воно сповільнене.
Вектор
![]() напрямлений завжди вздовж відрізка
АМ,
причому від точки М
до полюса А (рис.
30).
напрямлений завжди вздовж відрізка
АМ,
причому від точки М
до полюса А (рис.
30).
Тоді дістанемо рівняння:
![]() .
.
М
Рис.
31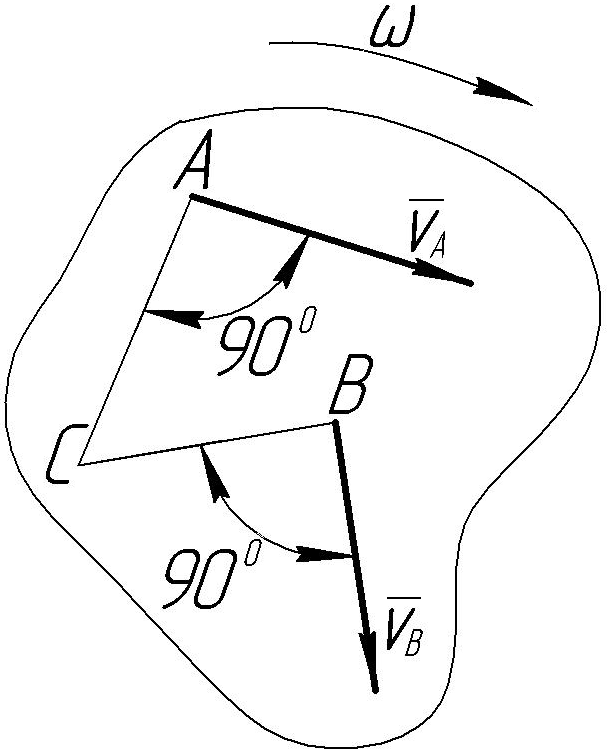
Якщо, наприклад, у даний момент часу миттьовий центр швидкостей знаходиться в точці С (рис.31), то швидкості будь-яких інших точок А і В будуть перпендикулярні до прямих, які з'єднують ці точки з точкою С, і напрямлені в бік їх обертання, а їх модулі:
![]() =ω·АС;
=ω·АС;
![]() =ω·ВС.
=ω·ВС.
Отже, швидкість точки плоскої фігури дорівнює її обертальній швидкості навколо миттьового центра швидкостей С. Із рівності також виходить, що
![]() ,
,
тобто швидкості точок тіла пропорційні їх відстаням до митьового центра швидкостей.
Складний рух точки. До цього часу ми розглядали рух тіла відносно однієї системи відліку. Але в механіці часто доводиться досліджувати рух точки або тіла відносно двох систем відліку. При цьому одна з них вважається умовно нерухомою, а друга рухається якимось чином по відношенню до першої. Такий рух точки або тіла називається складним.
Рух
точки М
відносно
рухомої системи координат називається
відносним.
У цьому випадку ми умовно зупиняємо
рухому систему відліку. Траєкторія, яку
описує точка М
у відносному русі, називається відносною
траєкторією.
Швидкість руху при цьому називається
відносною
швидкістю
і позначається
![]() ,
прискорення – відносним
прискоренням
і позначається
,
прискорення – відносним
прискоренням
і позначається
![]() .
.
Рух
рухомої системи відліку разом з точкою
М
відносно
нерухомої системи називається для точки
М
переносним.
Швидкість
тієї незмінно зв’язаної з рухомими
осями
точки,
з якого в даний момент часу збігається
точка М,
називається
переносною
швидкістю
точки
М
у
цей момент часу і позначається
![]() ,
а прискорення цієї точки –переносним
прискоренням точки
М
і позначається
,
а прискорення цієї точки –переносним
прискоренням точки
М
і позначається
![]() .
.
Рух
точки в рухомій системі координат по
відношенню до нерухомої системи
називаються абсолютним
або складним. Траєкторія
цього руху
називається абсолютною
траєкторією, швидкість
–
абсолютною швидкістю
і позначається
![]() ,
прискорення
–
абсолютним
прискоренням і
позначається
,
прискорення
–
абсолютним
прискоренням і
позначається
![]() .
.
Абсолютна швидкість матеріальної точки у складному русі дорівнює геометричній сумі її переносної і відносної швидкостей:
![]() =
=![]() +
+![]() .
.
Вектори
![]() ,
,![]() і
і![]() напрямлені по дотичних, проведених до
відповідних траєкторій.
напрямлені по дотичних, проведених до
відповідних траєкторій.
Абсолютне прискорення точки в складному русі дорівнює геометричній сумі трьох прискорень: відносного, яке характеризує зміну відносної швидкості точки у відносному русі; переносного, яке характеризує зміну переносної швидкості точки в переносному русі, і прискорення Коріоліса, яке характеризує зміну відносної швидкості точки в переносному русі й переносної швидкості точки у відносному русі.
![]() .
.
Це твердження виражає теорему Коріоліса.
Величина
![]() називаєтьсяповоротним
або коріолісовим
прискоренням
точки і характеризує зміну вектора
відносної швидкості
називаєтьсяповоротним
або коріолісовим
прискоренням
точки і характеризує зміну вектора
відносної швидкості
![]() у переносному русі й вектора переносної
швидкості
у переносному русі й вектора переносної
швидкості![]() у відносному русі:
у відносному русі:
![]() .
.