

Розв’язання
З
а)
б) Рис.35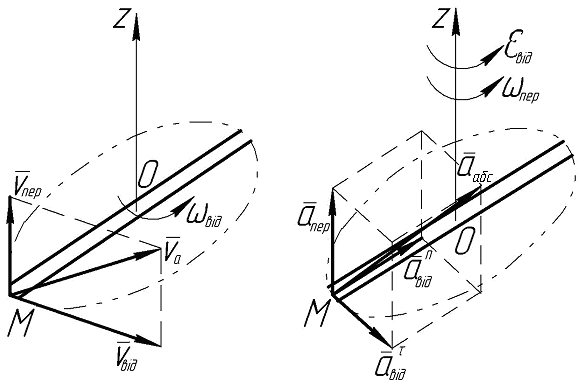
Застосуємо теорему про додавання швидкостей у складному русі (рис.35,а):
![]() .
.
Переносна швидкість точки М гвинта дорівнює швидкості тієї точки корпуса, яка збігається в даний момент часу з точкою гвинта. У поступальному русі корпуса швидкості всіх його точок однакові. Їх модуль визначиться з рівняння його поступального руху вертикально вгору z=0,25t2:
vпер=z/ =(0,25t2) / =0,5t.
При t=5с :vпер=0,5·5=2,5м/с.
Для визначення відносної швидкості точки знаходимо кутову швидкість гвинта:
ωвід=φ/=(3t2) / =6t.
При t=5с: ωвід=6·5=30рад/с.
Лінійна відносна швидкість точки визначається із формули:
vвід=Rωвід=0,5·30=15(м/с).
Оскільки переносна та відносна швидкості взаємно перпендикулярні, то абсолютна швидкість точки буде діагоналлю прямокутника, побудованого на цих швидкостях. Її модуль дорівнює:
![]() .
.
Для визначення прискорення застосуємо теорему Каріоліса (рис.35 ,б):
![]() .
.
Зазначимо, що оскільки переносний рух є поступальним, то:
![]() .
.
Тоді:
![]()
Переносне прискорення точки М гвинта дорівнює прискоренню тієї точки корпуса, яка збігається в даний момент з точкою гвинта.
Прискорення всіх точок корпуса однакові й визначаються:
апер=v/пер=(0,5t) / =0,5м/с2.
Відносне прискорення точки М гвинта визначається як:
![]() ,
,
де
![]() – нормальне прискорення у відносному
русі;
– нормальне прискорення у відносному
русі;![]() – дотичне прискорення у відносному
русі.
– дотичне прискорення у відносному
русі.
![]() ;
;
Оскільки
![]() ,
,
то
![]()
![]() .
.
Вектори
![]() ,
,![]() ,
,![]() взаємно перпендикулярні, тому абсолютне
прискорення зображається діагоналлю
прямокутного паралелепіпеда (див. рис.
35, б). Його модуль:
взаємно перпендикулярні, тому абсолютне
прискорення зображається діагоналлю
прямокутного паралелепіпеда (див. рис.
35, б). Його модуль:
![]() .
.
Питання для самоконтролю
Який рух називається плоскопаралельним? Навести приклади.
Рівняння плоскопаралельного руху.
Розкладання руху плоскої фігури на поступальний (переносний) і обертальний (відносний).
Як визначаються швидкості та прискорення точок тіла у плоскопаралельному русі?
Теорема про проекції швидкостей двох точок тіла на пряму, що їх з’єднує.
Миттьовий центр швидкостей і способи його визначення в різних випадках.
Як визначити швидкості точок плоскої фігури, знаючи положення миттьового центра швидкостей?
Миттьовий центр прискорень та його визначення.
Який рух точки або тіла називається складним? Навести приклади.
Дати означення абсолютному, відносному та переносному рухам. Навести приклади.
Сформулювати теорему про додавання швидкостей у складному русі. Довести її.
Сформулювати та довести теорему про додавання прискорень у складному русі (теорему Коріоліса).
Як визначається величина і напрямок прискорення Коріоліса?
В яких випадках прискорення Коріоліса дорівнює нулю?
Задачі для самостійного розв’язання
Задача
8.1.
Колесо котиться по похилій площині, яка
утворює кут
![]() із горизонтом. ЦентрО
колеса рухається за законом
із горизонтом. ЦентрО
колеса рухається за законом
![]() ,
дех
– вісь, напрямлена паралельно похилій
площині. До центра О
колеса підвішений стержень ОА=36см,
який коливається навколо горизонтальної
осі О,
перпендикулярної площині рисунка, за
законом
,
дех
– вісь, напрямлена паралельно похилій
площині. До центра О
колеса підвішений стержень ОА=36см,
який коливається навколо горизонтальної
осі О,
перпендикулярної площині рисунка, за
законом
![]() .
Визначити швидкість кінцяА
стержня АО
в момент часу t=1с.
.
Визначити швидкість кінцяА
стержня АО
в момент часу t=1с.