

Приклади розв’язання задач
Задача 1. Знайти рівняння руху шатуна стругального верстата, якщо кривошип обертається рівномірно: r – довжина кривошипа, L – довжина шатуна, ω0 – кутова швидкість кривошипа (рис. 32).
Розв’язання
Ш
Рис.32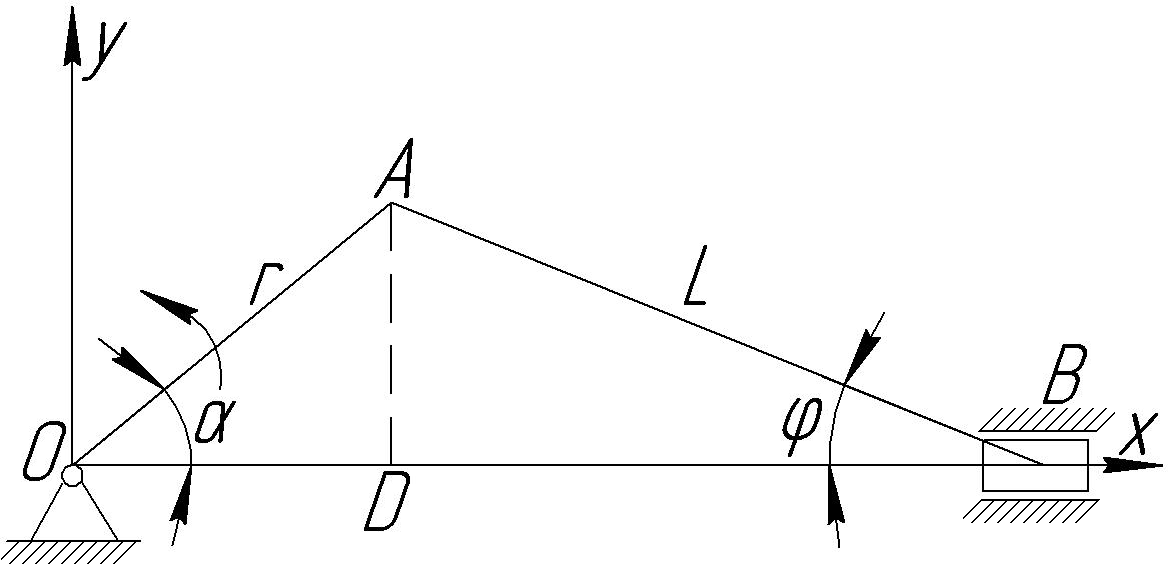
Отже, рівняння руху шатуна: xА=r cosω0t, yA=r sinω0t.
Далі визначимо sinφ:
sin
φ=![]() =
=![]() .
.
Звідки:
φ=arcsin(![]() sinω0t).
sinω0t).
З
Рис.33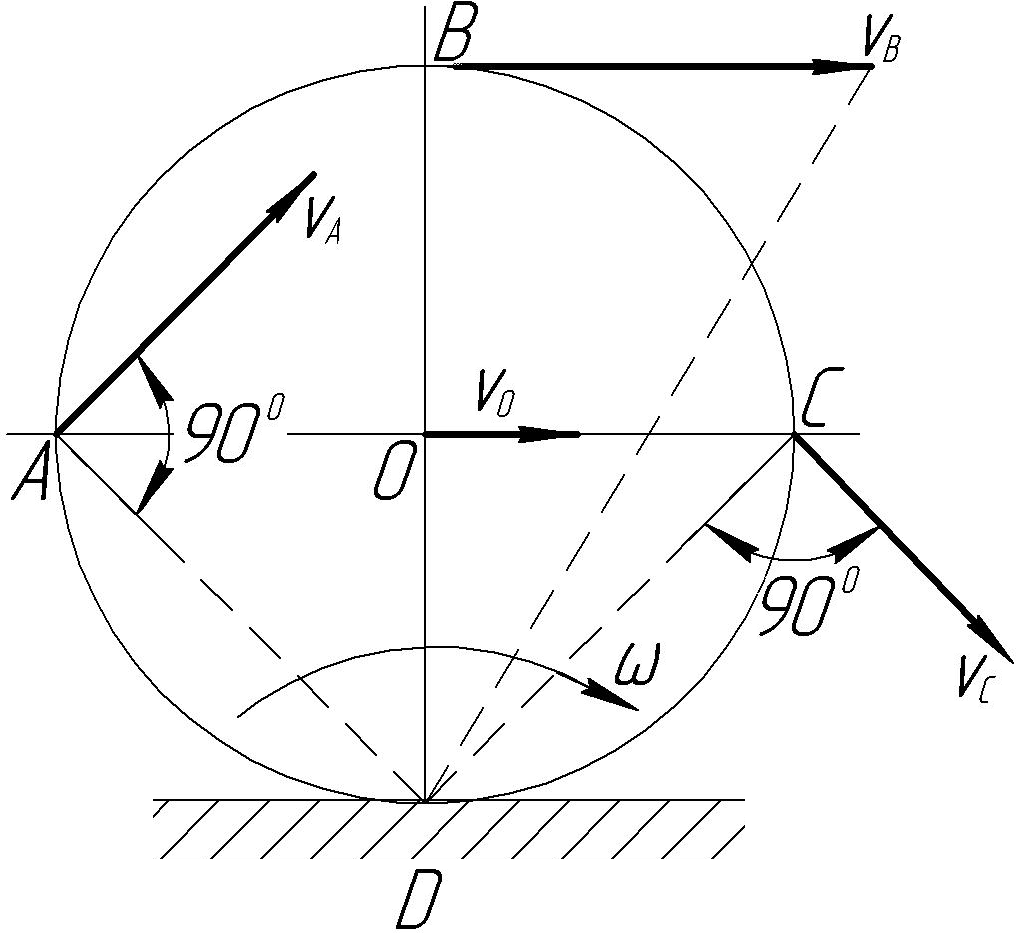
Розв’язання
За умовою задачі колесо трактора котиться без ковзання, тому швидкість у точці дотикання колеса до площини дорівнює нулю. Тому точка D є миттьовим центром швидкостей колеса (рис.33). Знаючи швидкість точки О, визначимо кутову швидкість колеса:
ω=![]() (с–1).
(с–1).
Використовуючи властивості миттьового центра швидкостей, визначаємо модулі швидкостей точок А, В та С колеса:
![]() ;
;
![]() ;
;
![]() .
.
Вектори швидкостей точок А, В і С перпендикулярні до прямих, які сполучають ці точки з миттьовим центром швидкостей (див. рис. 33).
З
Рис.34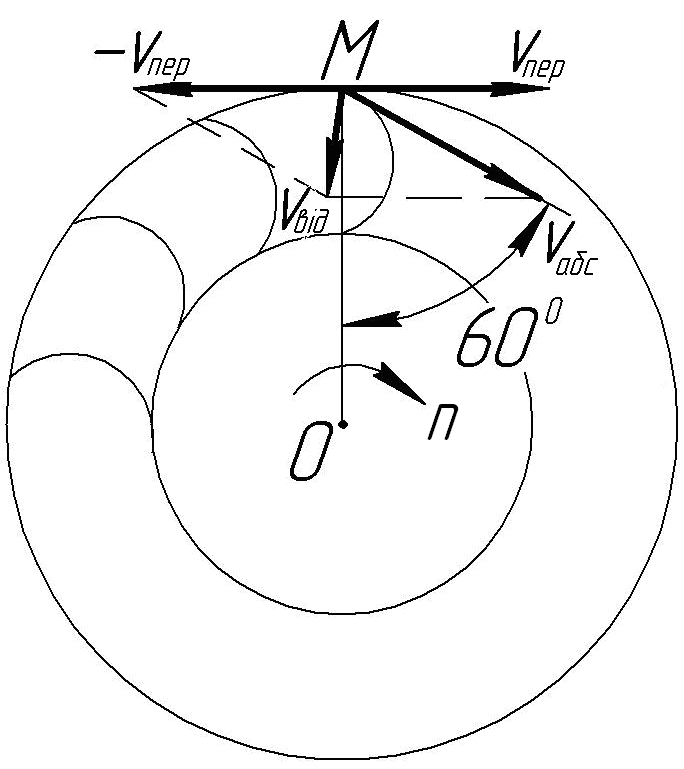
![]() дотикалась до лопатки. Знайти відносну
швидкість частинки води на зовнішньому
ободі колеса (у момент входу), якщо її
абсолютна швидкість при вході
дотикалась до лопатки. Знайти відносну
швидкість частинки води на зовнішньому
ободі колеса (у момент входу), якщо її
абсолютна швидкість при вході![]() =15м/с,
кут між абсолютною швидкістю і радіусом
α=600,
радіус входу R=2м,
частота обертання колеса n=30об/хв
(рис.34).
=15м/с,
кут між абсолютною швидкістю і радіусом
α=600,
радіус входу R=2м,
частота обертання колеса n=30об/хв
(рис.34).
Розв’язання
Для
визначення відносної швидкості частинки
води М
на зовнішньому ободі колеса скористаємося
тим, що відносна швидкість
![]() – це вектор, який дорівнює геометричній
сумі двох векторів: вектора абсолютної
швидкості
– це вектор, який дорівнює геометричній
сумі двох векторів: вектора абсолютної
швидкості![]() і вектора, що дорівнює за величиною
переносній швидкості
і вектора, що дорівнює за величиною
переносній швидкості![]() ,
але протилежного їй за напрямком:
,
але протилежного їй за напрямком:
![]() .
.
Знайдемо
спочатку переносну швидкість
![]() .
Переносним рухом частинки водиМ
є обертальний рух колеса навколо осі О
з кутовою швидкістю:
.
Переносним рухом частинки водиМ
є обертальний рух колеса навколо осі О
з кутовою швидкістю:
![]() =π
(с-1).
=π
(с-1).
Отже, переносна швидкість точки М дорівнює:
![]() (м/с).
(м/с).
Вона
напрямлена перпендикулярно до радіуса
ОМ
у бік обертання. Відклавши в протилежну
сторону вектор –![]() ,
за правилом паралелограма додамо
швидкості
,
за правилом паралелограма додамо
швидкості![]() і –
і –![]() .
Відносна швидкість точкиМ
напрямлена по діагоналі побудованого
на цих векторах паралелограма.
.
Відносна швидкість точкиМ
напрямлена по діагоналі побудованого
на цих векторах паралелограма.
Модуль її визначається формулою:
![]()
![]()
Задача 4. Вертикальний підйом гелікоптера проходить згідно рівняння z=0,25t2, де t виражено в секундах, z – в метрах. При цьому рівняння обертання гвинта має вид: φ=3t2, де t – в секундах, φ – в радіанах. Визначити абсолютну швидкість та прискорення точки гвинта, розташованої на відстані R=0,5м від вертикальної осі обертання, в кінці 5секунди.