

Короткі теоретичні відомості
Кількістю
руху
матеріальної точки називається векторна
величина
![]() ,
яка дорівнює добутку маси точки на її
швидкість. Цей вектор
,
яка дорівнює добутку маси точки на її
швидкість. Цей вектор![]() напрямлений так само, як і швидкість
точки, тобто по дотичній до її траєкторії.
Одиниця вимірювання в системіСІ
– 1кгּм/с=1
Нּс.
напрямлений так само, як і швидкість
точки, тобто по дотичній до її траєкторії.
Одиниця вимірювання в системіСІ
– 1кгּм/с=1
Нּс.
Для характеристики дії сили на тіло за деякий проміжок часу вводиться поняття імпульсу сили.
Елементарним
імпульсом сили
називається векторна величина
![]() ,
яка дорівнює добутку сили
,
яка дорівнює добутку сили
![]() на елементарний проміжок часу dt:
на елементарний проміжок часу dt:
![]()
Елементарний імпульс напрямлений вздовж лінії дії сили.
Імпульс
![]() будь-якої сили
будь-якої сили
![]() за кінцевий проміжок часу
за кінцевий проміжок часу
![]() дорівнює:
дорівнює:
![]()
 .
.
Отже,
імпульс
сили
за деякий кінцевий проміжок часу
![]() дорівнює визначеному інтегралу від
елементарного імпульсу, взятому від
нуля до
дорівнює визначеному інтегралу від
елементарного імпульсу, взятому від
нуля до![]() .
.
Зокрема,
якщо
![]() –
величина стала (
–
величина стала (![]() =const),
то:
=const),
то:
![]()
Рівняння, що виражає теорему про зміну кількості руху в диференціальній формі:
![]()
Похідна від кількості руху матеріальної точки за часом дорівнює геометричній сумі всіх сил, що діють на точку.
Рівняння, що виражає теорему про зміну кількості руху точки в кінцевому вигляді:
![]()
Зміна кількості руху матеріальної точки за деякий проміжок часу дорівнює сумі імпульсів всіх сил, що діють на точку, за той же проміжок часу.
При розв'язанні задач замість векторного рівняння часто користуються рівняннями в проекціях:
Кількістю
руху системи
будемо називати векторну величину
![]() ,
яка дорівнює геометричній сумі (головному
вектору) кількості руху всіх точок
системи:
,
яка дорівнює геометричній сумі (головному
вектору) кількості руху всіх точок
системи:
![]()
Кількість руху системи дорівнює добутку маси всієї системи на швидкість її центра мас:
![]()
Рівняння, що виражає теорему про зміну кількості руху системи в диференціальній формі:
![]()
Похідна за часом від кількості руху системи дорівнює геометричній сумі всіх зовнішніх сил, що діють на систему.
У проекціях на координатні осі маємо:
![]()
![]()
![]()
Рівняння, що виражає теорему про зміну кількості руху системи в інтегральній формі:
![]()
Зміна кількості руху системи за деякий проміжок часу дорівнює сумі імпульсів всіх зовнішніх сил, що діють на систему, за той же проміжок часу.
У проекціях на координатні осі будемо мати:
![]()
![]()
![]()
Із теореми про зміну кількості руху системи можна зробити висновки:
Якщо сума всіх зовнішніх сил, що діють на систему, дорівнює нулю:
![]()
тоді
![]() =const.
=const.
Якщо зовнішні сили, що діють на систему, такі, що сума їх проекцій на яку-небудь вісь (наприклад Oх) дорівнює нулю:
![]()
тоді Qx=const.
Ці результати і виражають закон збереження кількості руху системи.
Моментом
кількості руху точки
відносно
деякого центра О
називається
векторна величина
![]() ,
яка визначається рівністю:
,
яка визначається рівністю:
![]()
де
![]() – радіус-вектор точки, проведений із
центраО.
– радіус-вектор точки, проведений із
центраО.
М
Рис.44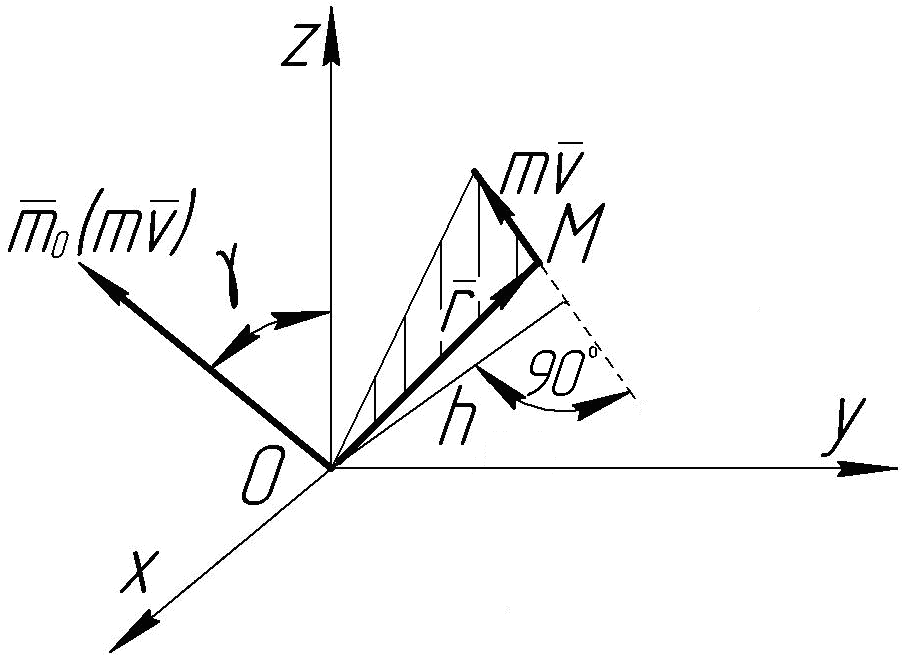
![]() напрямлений перпендикулярно площині,
яка проходить через
напрямлений перпендикулярно площині,
яка проходить через![]() і центр
О,
а
і центр
О,
а
![]() (рис.44).
(рис.44).
Момент
кількості руху точки відносно
якої-небудь
осі
Oz,
яка проходить через центр О,
буде дорівнювати проекції вектора
![]() на цю вісь:
на цю вісь:
![]()
![]()
де
γ
– кут між вектором
![]() і віссюOz.
і віссюOz.
Теорема моментів для матеріальної точки відносно центра: похідна за часом від моменту кількості руху точки, взятого відносно якого-небудь нерухомого центра, дорівнює моменту сили, що діє на точку, відносно того ж центра:
![]()
Якщо спроектувати обидві частини останнього рівняння на яку-небудь вісь Oz, яка проходить через центр О, то дістанемо:
![]()
Це рівняння виражає теорему моментів відносно осі.
Головним
моментом кількості руху (або кінетичним
моментом) системи відносно центра О
називається величина
![]() ,
яка дорівнює геометричній сумі моментів
кількості руху всіх точок системи
відносно цього центра:
,
яка дорівнює геометричній сумі моментів
кількості руху всіх точок системи
відносно цього центра:
![]()
Кінетичний момент тіла, яке обертається, відносно осі обертання дорівнює добутку моменту інерції тіла відносно цієї осі на кутову швидкість тіла:
![]()
Теорема моментів для механічної системи: похідна за часом від головного моменту кількості руху системи відносно деякого нерухомого центра дорівнює сумі моментів всіх зовнішніх сил системи відносно цього ж центра:
![]()
Проектуючи обидві частини рівності на нерухомі осі Oxyz, дістанемо:
![]()
![]()
![]()