

З
До задачі 3.10
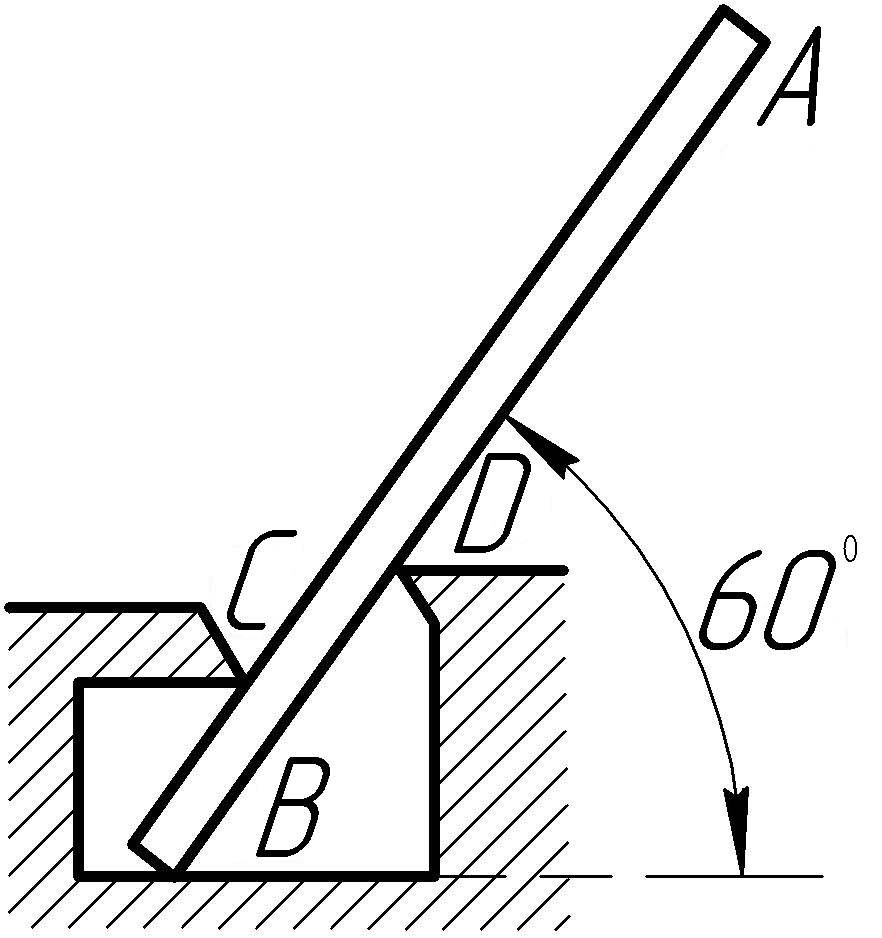
адача 3.10.Однорідна
балка АВ
вагою 200
Н спирається
на гладеньку горизонтальну підлогу в
точці В
під кутом
![]() і, крім цього, підтримується двома
опорамиС
і D.
Визначити реакції опор в точках В,
С
і D,
якщо довжина АВ=3
м; ВС=CD=0,5
м.
і, крім цього, підтримується двома
опорамиС
і D.
Визначити реакції опор в точках В,
С
і D,
якщо довжина АВ=3
м; ВС=CD=0,5
м.
Відповідь: RВ=200Н, RС=300Н, RD=300Н.
Практичне заняття №4
Тема: Просторова система сил
Програмні питання
Просторова система сил. Момент сили відносно осі. Послідовність його визначення, часткові випадки. Обчислення головного вектора і головного моменту просторової системи сил. Зведення просторової системи сил до найпростішого вигляду. Рівновага довільної просторової системи сил. Випадки збіжних і паралельних сил.
Література
Курок В.П. Технічна механіка. Курс лекцій: навч. посіб. для студ. вищих навч. закл. – К.: Пед. преса, 2007. – 272с., л.9.
Тарг С.М. Краткий курс теоретической механики. – М.: Высшая школа, 1986. – 416с., §§28 – 30.
Никитин Е.М. Краткий курс теоретической механики. – М.: Наука, 1983. – 400с., §§32 – 36.
Цасюк В.В. Теоретична механіка: Навчальний посібник. – К.: Центр навчальної літератури, 2004. – 402с., §§4.1 – 4.8.
Мещерский И.В. Сборник задач по теоретической механике. – М.: Наука, 1986. – 448с.
Короткі теоретичні відомості
Проекція
вектора
![]() ,
тобто моменту сили
,
тобто моменту сили
![]() відносно центра О,
на яку-небудь вісь z,
що проходить через цей центр (рис. 15),
називається моментом сили
відносно центра О,
на яку-небудь вісь z,
що проходить через цей центр (рис. 15),
називається моментом сили
![]() відносно осі z,
тобто
відносно осі z,
тобто
![]() або
або
![]() ,
,
де
![]() – момент сили
– момент сили![]() відносно осіz,
γ
– кут між вектором
відносно осіz,
γ
– кут між вектором
![]() і віссюz.
і віссюz.
І
Рис.15
![]() ,
як проекція вектора на вісь,величина
алгебраїчна.
Знак
,
як проекція вектора на вісь,величина
алгебраїчна.
Знак
![]() визначається так само, як і знак проекції
будь-якого вектора, у нашому випадку
визначається так само, як і знак проекції
будь-якого вектора, у нашому випадку![]() >0.
>0.
Знайдемо
ще один вираз для визначення цієї
величини. Для цього через довільну точку
О1
осі z
(див. рис.15) проведемо площину (xy),
перпендикулярну цій осі, й спроектуємо
∆ОАВ
на цю площину. Оскільки вектор
![]() перпендикулярний площиніОАВ,
а вісь z
перпендикулярна ΔО1А1В1,
то кут γ,
як кут між нормалями до цих площин, буде
кутом між цими площинами. Тоді:
перпендикулярний площиніОАВ,
а вісь z
перпендикулярна ΔО1А1В1,
то кут γ,
як кут між нормалями до цих площин, буде
кутом між цими площинами. Тоді:
![]() або
або
![]() .
.
Отже,
момент сили
![]() відносно осі z
дорівнює
алгебраїчному моменту проекції цієї
сили на площину, перпендикулярну осі
z,
взятому відносно точки О1
перетину осі з цією площиною.
відносно осі z
дорівнює
алгебраїчному моменту проекції цієї
сили на площину, перпендикулярну осі
z,
взятому відносно точки О1
перетину осі з цією площиною.
Ц
Рис.16
Момент
сили відносно осі буде мати знак плюс,
коли з додатного кінця осі поворот, що
прагне здійснити сила
![]() ,
бачиться проти ходу годинникової
стрілки, а знак мінус – за ходом
годинникової стрілки.
,
бачиться проти ходу годинникової
стрілки, а знак мінус – за ходом
годинникової стрілки.
Послідовність обчислення моменту сили відносно осі (рис.16):
1) необхідно провести площину (xy), перпендикулярну осі z;
2)
спроектувати силу
![]() на цю площину і знайти величинуFxy;
на цю площину і знайти величинуFxy;
3) опустити
із точки перетину О
осі з площиною перпендикуляр на лінію
дії
![]() і знайти його довжинуh;
і знайти його довжинуh;
4) обчислити добуток Fxy·h;
5) визначити знак моменту.
Поодинокі випадки:
1) якщо сила паралельна осі, то її момент відносно осі дорівнює нулю (оскільки Fxy=0);
2) якщо лінія дії сили перетинає вісь, то її момент відносно осі також дорівнює нулю ( оскільки h=0) ;
3) якщо сила перпендикулярна осі, то її момент відносно цієї осі дорівнює взятому з відповідним знаком добутку модуля сили на відстань між лінією дії сили і віссю.
Поєднуючи пункти 1 і 2, відзначимо, що момент сили відносно осі дорівнює нулю, якщо сила і вісь лежать в одній площині.
Необхідні
й достатні умови рівноваги будь-якої
системи сил виражаються рівностями
![]() ,
,![]() .
Але вектори
.
Але вектори![]() та
та![]() дорівнюють нулю тільки тоді, коли
дорівнюють нулю тільки тоді, коли![]() і
і![]() ,
тобто коли:
,
тобто коли:
![]()
Таким чином, для рівноваги довільної просторової системи сил необхідно і достатньо, щоб суми проекцій всіх сил на кожну з трьох координатних осей і алгебраїчні суми їх моментів відносно цих осей дорівнювали нулю.
Випадок
збіжних сил. Для
рівноваги просторової системи збіжних
сил має виконуватись рівність
![]() .
Аналітично модуль головного вектора
визначається за формулою:
.
Аналітично модуль головного вектора
визначається за формулою:
![]()
Оскільки під коренем стоїть сума додатних складових, то R може дорівнювати нулю тільки тоді, коли одночасно Rx=0, Ry=0, Rz=0,тобто коли сили, що діють на тіло, будуть задовольняти рівності:
![]()
Ц
Рис.
17
Випадок паралельних сил. Якщо всі сили, що діють на тіло, паралельні одна одній, можна обрати координатні осі таким чином, щоб вісь z була паралельна силам (рис.17). Тоді проекції кожної із сил на осі x та y і їх моменти відносно осі z будуть дорівнювати О, тому будемо мати тільки три умови:
![]()
![]()
![]()
Отже, для рівноваги просторової системи паралельних сил необхідно і достатньо, щоб алгебраїчна сума проекцій всіх сил на вісь, паралельну силам, і алгебраїчні суми їх моментів відносно двох інших координатних осей дорівнювали нулю.