

9.12. Релейно-контакторное управление
Различают неавтоматическое (ручное) и автоматическое управление.
При ручном управлении переключения в цепях электродвигателей производят вручную, непосредственно воздействуя на рукоятки аппаратов управления. Подобное управление возможно в нерегулируемых приводах незначительной мощности (электропривод центробежного насоса, вентилятора или других простейших механизмов). В мощных электроприводах ручное управление затруднено, а в некоторых случаях вообще невозможно (объекты управления могут находиться в местах, недоступных для оператора, или на значительном расстоянии).
При автоматическом управлении переключения в цепях электродвигателей производят аппаратами, контакты которых приводятся в действие силой тяги электромагнитов, вспомогательных двигателей гидравлических или других устройств. Роль оператора сводится к воздействию на кнопки управления, что, кроме того, позволяет осуществлять управление на значительном расстоянии от управляемого объекта, т. е. дистанционно.
Д вигатели,
аппараты управления, вспомогательные
электротехнические устройства,
соединенные в определенной функциональной
связи и последовательности, составляют
электроустановку.
вигатели,
аппараты управления, вспомогательные
электротехнические устройства,
соединенные в определенной функциональной
связи и последовательности, составляют
электроустановку.
Для каждой электроустановки, в том числе и для автоматизированного электропривода, основными схемами являются принципиальная и монтажная.
Принципиальная (или элементная) схема (рис. 9.28) содержит полный состав элементов устройств, входящих в электроустановку (электропривод), и отражает их взаимосвязь. Такая схема дает, как правило, детальное представление о принципе работы электроустановки.
Аппараты управления и защиты, а также электрические машины состоят в основном из однотипных элементов: контактов, катушек, устройств, позволяющих получить выдержки времени, обмоток машин и т. д. Все эти элементы имеют стандартные условные графические обозначения, некоторые из которых приведены
Особенностью принципиальной схемы является то, что элементы отдельных устройств (изделий) разнесены так, как это представляется удобным для отражения принципа действия электроустановки в целом. При этом может оказаться, что условные графические обозначения элементов разных устройств (изделий) расположены рядом и составляют одну цепь (ветвь) схемы. Так, например, на схеме рис.9.29 силовые контакты, включающие статорную обмотку двигателя, обозначены буквой Л. Катушка этого контактора и блокировочный контакт (включенный на зажимы кнопки «Пуск»), входящие в цепь управления, обозначены той же буквой как элементы одного и того же контактора.
М онтажная
схема (рис.9.29)
—
схема, на которой показаны соединения
составных частей установки, разводка
проводов и кабелей, их сечения, марки и
способ прокладки, а также места
присоединения к разъемам, клеммникам
и т. п. Элементы аппаратов на такой схеме
вычерчивают в соответствии с их
действительным размещением на панели
или в шкафу управления.
онтажная
схема (рис.9.29)
—
схема, на которой показаны соединения
составных частей установки, разводка
проводов и кабелей, их сечения, марки и
способ прокладки, а также места
присоединения к разъемам, клеммникам
и т. п. Элементы аппаратов на такой схеме
вычерчивают в соответствии с их
действительным размещением на панели
или в шкафу управления.
Чтение схем представляет определенную трудность. Для того чтобы шаг за шагом проследить срабатывание аппаратов, составляющих звенья схемы, их взаимодействия между собой и произведенные ими
переключения, прежде всего необходимо хорошо знать условные графические обозначения. Как видно из табл., условные обозначения приняты не для аппаратов (или машин) в целом, а для отдельных их элементов. При этом обозначение элементов одного и того же аппарата обязательно должно быть одинаковым и таким же, каким обозначен этот аппарат в схеме главной цепи, или его катушка в цепи управления.
Например, если катушка контактора, предназначенного для подключения статорной обмотки асинхронного двигателя, обозначена буквой Л, то и силовые и блокировочные контакты его должны быть обозначены этой же буквой.
Обозначение аппаратов на схемах чаще всего делают по функциональным признаком. Например, Л — линейный контактор, т. е. аппарат, соединяющий линии сети с обмоткой машины; Т — контактор торможения; В — контактор «Вперед»; РВ — реле времени; РУ — реле ускорения и т. п. Таким образом, прежде чем приступить к рассмотрению работы той или иной схемы, необходимо уяснить назначение каждого из аппаратов, входящих в схему, и «расшифровать» его обозначение, т. е. разобраться в спецификации машин и аппаратов, составляющих схему.
При этом следует отметить для себя, какие аппараты включаются вручную или механическим путем (от упоров, рычагов или кулачков, не показанных на схеме, т. е. различного рода блокировки, контакты с ручным возвратом и т. д.).
Кроме того, следует помнить, что на принципиальной схеме всегда все контакты реле, контакторов, кнопок управления, путевых выключателей и других аппаратов изображают в отключенном состоянии, т. е. при отсутствии электромагнитного или механического воздействия на кнопки и рычаги этих аппаратов.
После такой обработки схемы можно мысленно осуществить подачу напряжения на цепи управления. В одних случаях этого достаточно для того, чтобы схема считалась подготовленной к принятию команды, после которой в схеме автоматически производится ряд переключений, в других — катушки некоторых аппаратов, например реле напряжения, сразу получают питание, срабатывают и тем самым подготавливают схему к пуску.
В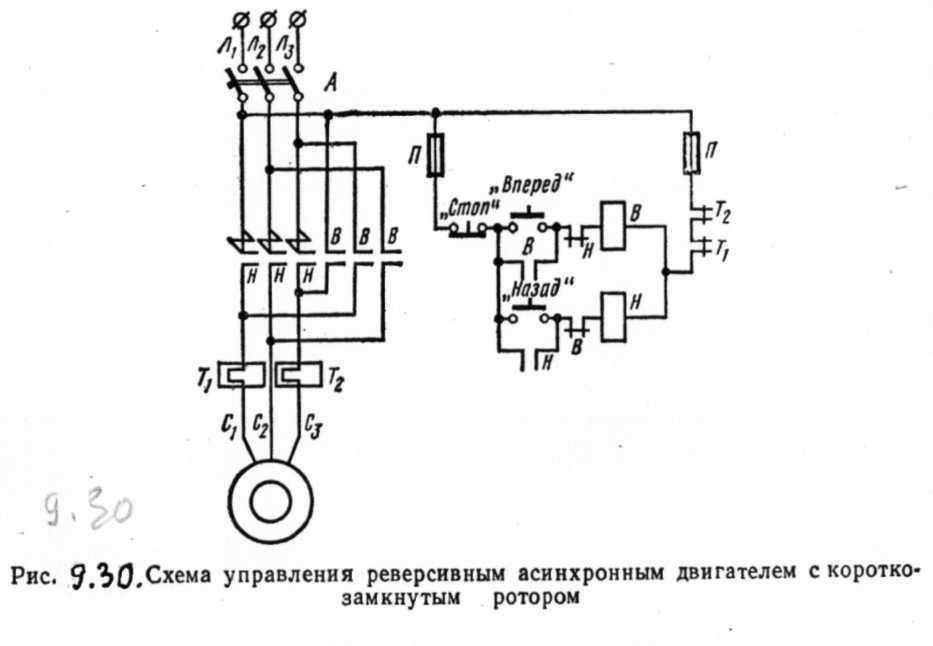 качестве примера рассмотрим простейшую
принципиальную схему управления
реверсивным асинхронным двигателем с
короткозамкнутым ротором определив
предварительно назначение и обозначения
аппаратов.
качестве примера рассмотрим простейшую
принципиальную схему управления
реверсивным асинхронным двигателем с
короткозамкнутым ротором определив
предварительно назначение и обозначения
аппаратов.
Следует заметить при этом, что элементы главных (силовых) цепей, по которым электроэнергия поступает из сети к обмоткам двигателя, вычерчивают, как правило, более жирными линиями по сравнению с элементами цепей управления — контактами реле, блокировочными контактами, катушками аппаратов и т. д.
В нашем примере для схемы приняты обозначения:
А - автоматический выключатель, с помощью которого установка вручную подключается к трехфазной сети переменного тока. Он же защищает установку от больших перегрузок, автоматически отключая ее.
В - контактор переменного тока, предназначенный для включения обмотки двигателя в трехфазную цепь переменного тока в условном направлении «Вперед».
Н - такой же контактор для включения двигателя в условном направлении «Назад».
В обоих контакторах, кроме главных контактов, обозначенных так же, как и катушки (В и Н), использованы по два блокировочных контакта — один замыкающий и один размыкающий. Замыкающий контакт блокирует соответствующую кнопку, а размыкающий включается последовательно в цепь катушки «чужого» контактора, например контакт В в цепь катушки контактора Н. Такое включение называют электрической блокировкой, исключающей одновременное включение обоих контакторов во избежание короткого замыкания.
«Вперед», «Назад» — кнопки, предназначенные для ручного замыкания цепи катушки контактора соответственно вперед и назад.
Т1 и Т2 — размыкающие контакты теплового реле. Нагревательные элементы с теми же обозначениями включены в фазы С1 и С3 обмотки двигателя. При длительной перегрузке двигателя нагревательные элементы нагревают биметаллические пластинки и контакты T1 и Т2 разомкнут цепь питания катушек контакторов.
После того как назначение аппаратов и их роль в схеме определены, прочитать схему не представляет труда.
Включением автомата А подготавливают схему к пуску. Далее, если будет нажата кнопка «Вперед», цепь катушки контактора В получит питание через следующие элементы этой цепи: размыкающий контакт «Стоп», размыкающий контакт Н и два размыкающих контакта Т1 и Т2 (цепь управления защищена предохранителями П).
Якорь контактора В втянется, замыкающие силовые контакты В замкнутся и фазы статорной обмотки двигателя С1 С2, С3 будут соединены соответственно с линейными проводами сети Ли Л2, Л3. Ротор двигателя начнет вращаться в условном направлении «Вперед».
Для изменения направления вращения сначала отключают двигатель от сети путем нажатия на кнопку «Стоп», а затем включают кнопку «Назад». При этом получит питание катушка контактора Н и подвижная система контактов подключит обмотку двигателя к линейным проводам в следующем порядке: C1 — Л3, С2 — Л2, С3 — Л1. Ротор двигателя изменит направление вращения на противоположное.