

3.5. Характеристики элементов автоматики
Как было установлено, всякая система автоматики состоит из отдельных элементов, отличающихся как по выполняемым ими функциям, так и по принципу их действия. Однако многие определения и характеристики являются общими для всех элементов или для больших их групп.
Пусть на вход элемента подается величина х, а на выходе получается величинау. Связь между зависимой переменной у и аргументомхy = f(x)определяется задачей, выполняемой элементом. Одни элементы должны только количественно преобразовывать входную величину, другие — еще и качественно. Например, входной величиной первичного измерительного элемента уровня воды является измеряемый уровень; выходной величиной может быть угол поворота выходной оси элемента, напряжение электрического тока и т. п.
Мы рассмотрим главным образом основные статические характеристики элементов, то есть зависимости между величинами уих, при которых выходная величинаузависит только от входной величиных(но не от времени, как это наблюдается в переходных процессах). Режим, при котором действующие в системе сигналы не зависят от времени, называется равновесным.
О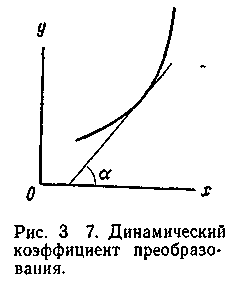 бщей
характеристикой любого элемента является
коэффициент преобразования, или
передаточный коэффициент, представляющий
собой либо отношение выходной величины
к входной, либо отношение их производных
по времени. Соответственно, различают
статический
бщей
характеристикой любого элемента является
коэффициент преобразования, или
передаточный коэффициент, представляющий
собой либо отношение выходной величины
к входной, либо отношение их производных
по времени. Соответственно, различают
статический![]() kи динамический
kи динамический![]() коэффициенты преобразования. Как тот,
так и другой коэффициент может быть
либо безразмерной величиной (если
элемент осуществляет количественное
преобразование), либо иметь размерность
(если элемент осуществляет качественное
преобразование).
коэффициенты преобразования. Как тот,
так и другой коэффициент может быть
либо безразмерной величиной (если
элемент осуществляет количественное
преобразование), либо иметь размерность
(если элемент осуществляет качественное
преобразование).
Рис 3.10. Динамический коэффициент преобразования.
Динамический коэффициент преобразования
характеризует крутизну статической
характеристики y =
f(x)и численно равен тангенсу угла наклона
касательной в данной точке характеристики,
то есть![]() (рис. 3.10).
(рис. 3.10).
Значения статического и динамического коэффициентов меняются в зависимости от значения хи не равны между собой. Исключение составляет лишь прямолинейная характеристикау = сх; в этом случаеkl = k = с.
Относительным коэффициентом преобразования
называется отношение относительного
приращения выходной величины к
относительному приращению входной:
![]() .
Как видно из приведенного определения,k0является
безразмерной величиной; при прямолинейной
статической, характеристикеk0
=1.
.
Как видно из приведенного определения,k0является
безразмерной величиной; при прямолинейной
статической, характеристикеk0
=1.
Коэффициент преобразования (передаточный коэффициент) имеет и другие, частные названия в зависимости от функций, выполняемых элементами. Так, применительно к усилителю говорят о коэффициенте усиления, в случае датчиков — о чувствительности элемента и т. п. Мы будем пользоваться обобщенным термином «коэффициент преобразования», указывая иногда дополнительно функциональное название.
Характерной величиной всякого элемента автоматики является также погрешность — отклонения выходной величины при одной и той же входной. Такие отклонения возникают вследствие изменения либо внутренних свойств элемента (старение материала, трение), либо внешних условий его работы (температура, напряжение питания и т. п.). Различают абсолютную и относительную погрешности. Абсолютная погрешность Δуравна разности между фактическим у и полученным (у"илиу') значениями выходной величины (рис. 3.8, а). Очевидно, эта разность может быть положительной (Δу=у"–у'>0) или отрицательной (Δу=у"–у'<0). Относительной погрешностью называется отношение абсолютной погрешности к расчетному значению выходной величины:
![]() или
или![]() .
.
Приведенной относительной погрешностью называют отношение абсолютной погрешности к максимальному значению выходной величины:
![]() или
или![]() .
.
Для оценки точности работы элементов автоматики обычно пользуются именно приведенной относительной погрешностью.
Погрешность характеризует разброс значений упри одной и той же величинех.
Итак, вследствие разброса одной и той же входной величине хмогут соответствовать различные значенияу, заключенные междуу'иу". Вместе с тем одной и той же величине у могут соответствовать различные значениях(рис. 3.10).
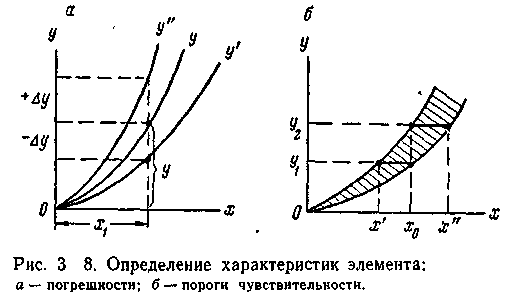
Рис 3.10. Определение характеристик элемента:
а- погрешности; б- пороги чувствительности.
Таким образом, в интервалах х' - х0их" - х0изменение входной величины может не вызывать изменения выходной величины. Этот интервал называется зоной нечувствительности. Значения (х'их") входной величины, с которых она начинает изменяться (становится заведомо меньшеу1или большеу2), называются порогами чувствительности.
Ш ирокое
распространение в системах автоматики
находит обратная связь, то есть воздействие
на вход элемента величины, пропорциональной
выходной величине. На рисунке 3.11 показано,
что обратная связь осуществляется с
помощью дополнительного элемента
обратной связи ОС. На вход элемента,
помимо входной величиных, подается
также величинахо.с. =
βy1.
Множительβназывается коэффициентом
обратной связи и может быть как
положительным, так и отрицательным.
ирокое
распространение в системах автоматики
находит обратная связь, то есть воздействие
на вход элемента величины, пропорциональной
выходной величине. На рисунке 3.11 показано,
что обратная связь осуществляется с
помощью дополнительного элемента
обратной связи ОС. На вход элемента,
помимо входной величиных, подается
также величинахо.с. =
βy1.
Множительβназывается коэффициентом
обратной связи и может быть как
положительным, так и отрицательным.
Рис 3.11. Структурная
схема элемента:
а- без обратной связи,
б- с обратной связью
При наличии обратной связи величина
сигнала на входе элемента равна х+хо.c.
= х + βу1. что большехпри
положительной обратной связи (β>0) и
меньше при отрицательной (β<0). Введение
обратной связи изменяет коэффициент
преобразования элемента. Если без
обратной связи статический коэффициент
преобразования был равен![]() ,
то с введением обратной связи, имеем
,
то с введением обратной связи, имеем![]() ,
где по прямой связи
,
где по прямой связи![]() ;
отсюда
;
отсюда![]()
Из формулы видно, что с введением положительной обратной связи величина коэффициента преобразования увеличивается, ас введением отрицательной — уменьшается. Поэтому положительная обратная связь применяется в тех случаях, когда надо получить большие значенияупри малых значенияхх.
Однако введение обратной связи изменяет не только коэффициент преобразования, но и относительную погрешность. Положительная обратная связь повышает погрешность выходной величины, а отрицательная вместе
с уменьшением коэффициента преобразования снижает и относительную погрешность выходной величины. Поэтому отрицательная обратная связь применяется, когда требуется погрешность свести к минимуму. Так, отрицательная обратная связь применяется в системах автоматического регулирования, где требуется высокая устойчивость выходной величины.