

8.2. Реле выдержки времени и программные устройства
Реле выдержки времени предназначены для создания определенной временной задержки при передаче сигнала от одного элемента автоматики к другому.
Программное устройство представляет собой разновидность реле выдержки времени и имеет обычно несколько независимых выдержек времени сравнительно большой величины.
Реле выдержки времени изготовляются с электрическими, пневматическими и гидравлическими воспринимающими органами и с электрическими, механическими, пневматическими, гидравлическими' и другими устройствами замедления. Наибольшее распространение получили реле с электрическими воспринимающими органами, реагирующие на сигналы постоянного или переменного тока.
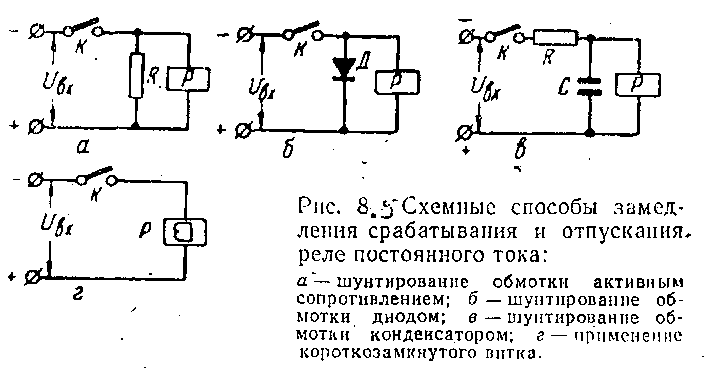
Для создания сравнительно небольшой выдержки времени (до 5 сек) часто применяются простейшие схемные методы, замедляющие нарастание или спадание токов в обмотке электромагнитного реле постоянного тока при помощи резисторов, конденсаторов, полупроводниковых диодов, дросселей и короткозамкнутых витков или колец.
На рисунке 8.5 показаны схемные способы замедления электромагнитного реле Р при срабатывании и отпускании. При большом числе витков обмотки реле весьма эффективным методом является шунтирование обмотки активным сопротивлением или диодом (рис.8.5 а и б). Сущность такого метода состоит в том, что э.д.с. самоиндукции, возникающая в обмотке реле после его отключения ключом К, поддерживает протекание тока, в прежнем направлении. Этот ток, замыкаясь через шунтирующее сопротивление R, медленно убывает, а якорь реле некоторое время остается в притянутом состоянии.
Выдержка времени на отпускание реле может быть определена по формуле:
![]() ,
,
где RpиL— соответственно активное сопротивление и индуктивность обмотки реле в положении покоя, то есть при максимальном рабочем зазоре;Iтр— ток трогания якоря реле при срабатывании.
Следует заметить, что шунтирующее сопротивление вызывает дополнительный расход мощности. Этот недостаток устранен в схеме с шунтирующим диодом Д, включенным навстречу питающему напряжению. Кроме того, схема с диодом позволяет получить большую выдержку времени, поскольку диод включен в проводящем направлении и в уравнении, сопротивление R= 0.
На рисунке 8.5 в представлена схема, в которой после замыкания ключа К протекает большой ток заряда емкости С, а напряжение Uвхпочти полностью гасится на резистореR. По мере заряда емкости ток в обмотке реле возрастает до определенного значения, при котором реле срабатывает. Продолжительность времени задержки срабатывания зависит от постоянной времени цепи и может изменяться в широких пределах подбором соответствующей емкости конденсатора С и сопротивленияR.
8.3. Электрические исполнительные механизмы.
Исполнительные механизмы автоматических устройств предназначены для силового воздействия на регулирующие органы объектов управления. Они классифицируются по виду используемой энергии: электрические, гидравлические и пневматические. В мелиорации обычно применяют электрические и гидравлические механизмы. По характеру воздействия на регулирующий орган различают двухпозиционный, многопозиционные и пропорциональные исполнительные механизмы.
Двухпозиционные выполняют простейшие операции (например, открыть — закрыть), многопозиционные — ступенчатое, пропорциональное и плавное регулирование
Электрические исполнительные механизмы выполняются с электромагнитным (соленоидным) и электродвигательным приводом.
Исполнительные механизмы с электромагнитным приводом обеспечивают поступательное перемещение регулирующих органов. Они применяются главным образом в электромагнитных клапанах и вентилях для двухпозиционного регулирования. Чтобы открыть клапан и вентиль, питание подают на катушку электромагниту которая втягивает сердечник, связанный с запорным органом вентиля. Закрытие вентиля происходит под действием пружины при отключении катушки электромагнита.
Для снижения потребления электроэнергии эти механизмы оснащаются механическими защелками, удерживающими сердечник при открытом вентиле и отключении питания катушки. Закрытие происходит за счет подачи импульса тока в маломощную катушку электромагнита освобождения защелки.
В электродвигательных исполнительных механизмах для привода используются одно- и двухфазные двигатели переменного тока, асинхронные трехфазные, синхронные, двигатели постоянного тока и сельсины.
На рисунке приведена схема двухпозиционного исполнительного механизма с электродвигательным приводом типа ДР-1М, который состоит из конденсаторного двигателя I и контактного управляющего устройства II. Двигатель имеет две статорные обмотки 3 и 4. В одну из них включен конденсатор для смещения фазы протекаемого тока и получения вращающегося магнитного поля. С валом ротора 2 кинематически связан ползунок 5 контактного управляющего устройства. В исходном положении ползунок находится на одном из контактов 8 или 9, выступающих над контактной пластиной 6. Когда ползунок размещен на контакте 8 и замыкается вверх контакт датчика 1, управляющего исполнительным механизмом, получают питание обмотки двигателя и он начинает вращаться. Ползунок сходит с контакта 8 на пластину 6, но цепь питания двигателя остается замкнутой за счет перемыкания ползунком пластин 6 и 7. Сделав полоборота, ползунок окажется на контакте 9 и двигатель остановится. При переключении контакта датчика 1 вниз, двигатель вновь получает питание и вращаясь, переместит ползунок на полоборота до размещения на контакте 8. Двигатель всегда вращается в одном направлении, а направление движения регулирующего органа изменяется за счет внешних кинематических связей между исполнительным механизмом и регулирующим органом.

Механизм ДР-М отличается от механизма ДР-1М возможностью сочленения с регулирующим органом не только с помощью диска, совершающего вращательное движение, но и штоком, перемещающимся поступательно.
В системах пропорционального регулирования применяют исполнительные механизмы ПР-1М, ПР-М и МЭО. Для привода используются конденсаторные двигатели, но в отличие от механизмов ДР предусмотрена возможность реверсирования. Реверсирование происходит за счет переключения конденсатора С из одной цепи обмотки двигателя в другую конечными выключателями К1 и К2
Для дистанционного контроля положения и устройства обратной связи механизмы оснащаются блоками с индуктивными, резистивными датчиками и микропереключателями положения.
Исполнительные механизмы ПР, ДР и МЭО широко используются для привода поворотных дисковых затворов. В качестве привода задвижек и затворов перегораживающих сооружений применяются многооборотные электрические исполнительные механизмы.
2. Технические характеристики двигателей исполнительных механизмов М, А, Б, В, Г, Д
|
Показатели |
Тип механизма | |||||
|
М |
А |
Б |
В |
Г |
Д | |
|
Мощность двигателя, кВт
Частота вращения двигателя, об/мин |
0,03
1300 |
0,12 0,18
1400 |
0,6 1,3
1300 |
3,0 4,0
1350 |
4,0 7,5
1350 |
7,5 -
1300 |
В мелиоративной практике наиболее распространены унифицированные исполнительные механизмы типов М, А, Б, В, Г, Д, Они принципиально однотипны и отличаются по габаритам, мощности двигателя и несущественными конструктивными изменениями. Как приводные двигатели в механизмах используют асинхронные трехфазные двигатели с повышенным скольжением и фланцевым креплением. Двигатель связан с запорным органом задвижки червячным редуктором (в механизмах М и А цилиндрическим). Механизм имеет стрелку местного указателя положения, кинематически связанную с приводным валом, и потенциометр дистанционного указателя. Защищается механизм от перегрузок муфтой ограничения крутящего момента или реле максимального тока.
Предусматриваются штурвал ручного привода и механическая блокировка, которая при включении ручного привода отсоединяет вал двигателя от вала червячного редуктора, и напротив, при сочленении двигателя с редуктором расщепляется его кинематическая связь со штурвалом ручного привода.
Электрические исполнительные механизмы также применяют для привода плоских щитовых затворов перегораживающих сооружены. Промышленностью серийно выпускаются винтовые подъемники типа В-73 с асинхронным трехфазным приводом. Двигатели соединяются через редуктор с грузовыми гайками привода грузовых подъемных винтов с трапецеидальной резьбой. Для местного отсчета и дистанционных измерений установлены датчики положения затвора. В подъемниках предусмотрена рукоятка ручного подъема.
Техническая характеристика приводных двигателей винтовых подъемников приведена в таблице 3.
3. Техническая характеристика приводных двигателей винтовых подъемников В-73
|
Показатели |
Тип | |||||||
|
1ЭВ |
2,5ЭВ |
5ЭВД |
5ЭВ |
10ЭВД |
10ЭВ |
20ЭВД |
20ЭВ | |
|
Мощность двигателя, кВт |
0,4 |
0,6 |
1,0 |
1,0 |
1,3 |
1,3 |
2,0 |
2,0 |
|
Частота вращения, об/мин |
880 |
880 |
870 |
870 |
870 |
870 |
900 |
900 |
|
Продолжительность подъема на 1 м двигателем, мин |
8 |
8 |
8 |
5 |
5 |
6 |
6 |
6 |
|
Продолжительность подъема на 1 м вручную, мин |
3 |
7 |
9 |
15 |
19 |
20 |
40 |
33 |

Рис. 8.7. Регулятор уровня с мембранным исполнительным механизмом:
1 — выпускная труба; 2 — рабочая камера; 3 — мембрана; 4 — рабочий клапан; 5 — дроссельная трубка; 6 — входная дроссельная трубка; 7 — гибкая трубка; 8 — поплавковая камера; 9 — поплавок.