

Контрольные вопросы по теме 7.
1. Полупроводниковые усилители – как они устроены?
2. Нуль-орган, его функции и устройство.
3. Нуль-индикатор, его функции и устройство.
4. Гидравлический усилитель – где применяется?
5. Пневматический усилитель – как устроен?
6. Функции усилителя и его место в системе автоматики.
Тема 8. Исполнительные элементы.
8.1. Электромагнитные реле
Схема простейшего электромагнитного реле показана на рисунке 8.1. Подвижный якорь 1 притягивается к неподвижному сердечнику 2 электромагнита, по обмотке 3 которого протекает ток. Перемещение якоря приводит к замыканию контактов 5. При отсутствии тока якорь и контакты возвращаются в исходное положение противодействующей пружиной 4. Чтобы под влиянием остаточного магнитного потока якорь не оставался притянутым к сердечнику, на нем укреплен небольшой штифт 6. высотой 0,1—0,2 мм, называемый штифтом отлипания. Якорь и сердечник реле изготовляются из магнитомягкого материала, а штифт — из немагнитного материала (латуни или меди).

По роду тока в обмотке различают электромагнитные реле постоянного и переменного тока промышленной и высокой частоты. В свою очередь, реле постоянного тока делятся на нейтральные и поляризованные.
Нейтральные реле не различают полярности сигнала и одинаково реагируют на постоянный
ток обоих направлений, протекающий по его обмотке. В поляризованных реле в зависимости от полярности сигнала изменяется направление действующего на якорь усилия и при срабатывании замыкаются только те контакты, которые соответствуют полярности данного сигнала.
По своему назначению реле подразделяются на основные, реагирующие на изменение основных электрических величин, и вспомогательные. К вспомогательным можно отнести промежуточные реле, предназначенные для размножения числа контактов и передачи сигнала от одних реле к другим реле или аппаратам с одновременным повышением коммутационной способности управляемых цепей; реле выдержки времени, осуществляющие функции управления по временному фактору, и сигнальные реле, фиксирующие действия основных реле и управляющие световыми и звуковыми сигналами.
Правильная и надежная работа электромагнитных реле во многом зависит от надлежащего согласования тяговых и механических характеристик.
Под тяговой характеристикой понимается зависимость электромагнитного усилия от воздушного зазора между якорем и сердечником электромагнита реле. Зависимость усилия противодействующей пружины от перемещения якоря в реле называют противодействующей или механической характеристикой.
Для того чтобы реле сработало, тяговая характеристика должна лежать выше механической, а чтобы реле отпустило — ниже ее.
Тяговые характеристики Fэ =f(δ) представляют собой семейство гипербол для различных ампервитков в пределах изменения зазора от δминдо δмаксмеханическаяFм=f(δ) ломаную линию. Если якорь притянут (δмин) то, очевидно, увеличение электромагнитного усилия не вызовет дополнительного его перемещения (отрезок 1—2). Отпускание реле происходит приFм=Fэ.отп.в точке 2, после чего с ростом δ противодействующая сила пружины реле постепенно уменьшается (отрезок 2—3), а затем резко падает до конечного значения (отрезок 3—4). При увеличении тока в обмотке якорь реле трогается в точке 4, но притягивается к сердечнику только в точке 3 приFэ.ср.
Особенность реле переменного тока состоит в том, что в них применяются специальные меры для устранения вибрации контактов, а сердечник электромагнита набирается из листовой трансфроматорной стали с целью уменьшения потерь на вихревые токи. Вибрация контактов вызывается периодическим изменением величины и направления переменного синусоидального тока. При синусоидальном токе тяговое усилие реле меняется с двойной частотой от нуля до максимума в течение каждого полупериода. Следовательно, и якорь реле будет отходить и притягиваться также с двойной частотой, что ухудшает работу контактов и вызывает специфическое гудение реле. Для устранения вибраций на часть полюса электромагнита насаживают медный коротко-замкнутый виток, называемый экраном (рис. 8.1, а), который вызывает расщепление общего магнитного потока Ф реле на два потока ФАи ФВсдвинутых между собой на некоторый угол φ.

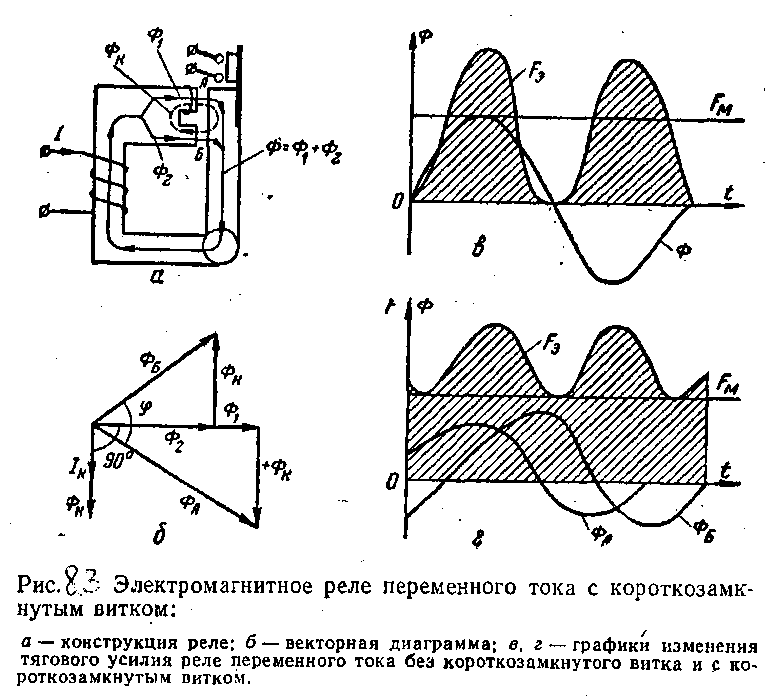

Магнитный поток Ф1наводит в короткозамкнутой обмотке токIk, сдвинутый на угол 90° по отношению к потоку Ф (при неучете потерь в стали). ТокIксоздает магнитный поток Фк, который в части А полюса геометрически складывается с потоком Ф1: ФА= Ф1+ Фk, а в части Б вычитается из потока Ф2: ФВ = Ф2– Фк
Таким образом, потоки ФАи ФБсдвинуты на угол φ. Каждый из них создает тяговое усилие, а результирующее усилиеFэимеет тем меньше пульсаций, чем ближе к 90° угол φ (рис. 8.3 ,в и г).
У поляризованных реле поток, создаваемый постоянным магнитом 1, на пути от южного полюса Sразветвляется на два равных потока и по магнитопроводящим винтам 6 проходит через часть сердечника электромагнита 7 (рис.8.4, а). Далее через воздушные зазоры обе части потока Ф0проходят с противоположных сторон в якорь 2. Из якоря по магнитопроводящему лепестку 4 поток возвращается к северному полюсу N магнита / (рис. 8.4).
Направление магнитного потока Ф в электромагните зависит от полярности тока в обмотке. Следовательно, в одном из полюсов электромагнита 7 результирующий поток равен сумме потоков Ф и Ф0, а в другом — их разности. Для реле, изображенного на рисунке 8.4, а можно записать:
Фл= Ф - Ф0и Фп= Ф + Ф0.
Естественно, что якорь реле, поворачиваясь вокруг оси 5, притягивается к тому полюсу электромагнита 7, в котором поток больше (в нашем случае — правый), и замыкает концом 3 левый контакт реле. При изменении направления тока в обмотке якорь перебрасывается в другую сторону. Повышенная чувствительность и быстродействие поляризованного реле объясняются малым воздушным зазором 6 и усиливающим действием магнитного потока Ф0. Из выражения видно, что чем больше поток Ф0, тем меньшей величины может быть поток Ф и, следовательно, тем выше чувствительность реле.
В двухпозиционных реле замыкается один из двух неподвижных контактов в зависимости от полярности входного сигнала постоянного тока и остается замкнутым после снятия сигнала. Если неподвижные контакты отрегулировать так, как показано на рисунке 8.4 б, то получится двухпозиционное реле с преобладанием к правому контакту. При отсутствии сигнала всегда будет замкнут правый контакт. Это объясняется тем, что левый воздушный зазор между магнитопроводом и якорем всегда меньше, чем правый. В трехпозиционном реле имеется возвратная пружина, возвращающая якорь в среднее положение после снятия сигнала.