

методичка №359
.pdf2
1
ТГ2



 Д
Д
ТГ1
СУ
U
Рис.3.5. Функциональная схема следящей системы:
1– прокатная клеть; 2 – барабан; ТГ1, ТГ2 – тахогенераторы;
Д– двигатель; СУ – система управления приводом.
Кд – коэффициент усиления двигателя, рад/с·В.
Уравнение тахогенератора
|
Ттг |
dU тг |
+U тг = Ктгω, |
|
dt |
||
|
|
|
|
где Ттг |
– постоянные времени, с; |
|
|
U тг |
– напряжение на выходе тахогенератора. |
||
2.Проверить систему на устойчивость по критерию, указанному препода-
вателем. Значения параметров для различных вариантов приведены в табл.3.2
3.Для устойчивых АСУ определить запасы устойчивости по модулю и фа-
зе.
4.Для неустойчивой АСУ предложить решение, обеспечивающее устойчивость системы и достаточные запасы устойчивости.
5.Сделать выводы.
34

|
|
|
|
|
|
|
|
|
|
|
Таблица 3.2 |
|
|
Варианты задания |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Значения параметров |
|
|
|
|
|
||||
Вариант |
T1, с |
T2 , с |
|
Кд, |
|
Ккг , |
|
рад |
|
Ттг |
|
|
рад |
|
|
|
|
||||||
|
|
с В |
|||||||||
|
|
|
|
с В |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
2 |
|
|
|
||
1 |
0,1 |
0,2 |
1 |
|
|
|
|
0,05 |
|||
|
|
|
|
|
|
5 |
|
|
|
||
2 |
0,5 |
0,2 |
1 |
|
|
|
|
,04 |
|||
|
|
|
|
|
|
1 |
|
|
|
||
3 |
0,4 |
0,1 |
2 |
|
|
|
|
0,03 |
|||
|
|
|
|
|
|
2 |
|
|
|
||
4 |
0,2 |
0,1 |
3 |
|
|
|
|
0,03 |
|||
|
|
|
|
|
|
1 |
|
|
|
||
5 |
0,3 |
0,2 |
0,5 |
|
|
|
|
0,05 |
|||
|
|
|
|
|
|
2 |
|
|
|
||
6 |
0,1 |
0,2 |
10 |
|
|
|
|
0,04 |
|||
|
|
|
|
|
|
4 |
|
|
|
||
7 |
0,5 |
0,25 |
4 |
|
|
|
|
0,05 |
|||
|
|
|
|
|
|
8 |
|
|
|
||
8 |
0,1 |
0,2 |
4 |
|
|
|
|
0,07 |
|||
|
|
|
|
|
|
3 |
|
|
|
||
9 |
0,2 |
0,1 |
3 |
|
|
|
|
0,10 |
|||
|
|
|
|
|
|
2 |
|
|
|
||
10 |
0,5 |
0,2 |
4 |
|
|
|
|
0,07 |
|||
|
|
|
|
|
|
1,7 |
|
|
|||
11 |
0,5 |
0,2 |
3 |
|
|
|
0,02 |
||||
|
|
|
|
|
|
1,5 |
|
|
|||
12 |
0,5 |
0,3 |
5 |
|
|
|
0,04 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
3.2.2. Исследование устойчивости регулятора положения нажимных винтов прокатной клети.
1. По функциональной схеме положения нажимных винтов прокатной кле-
ти (рис. 3.6) составить структурную схему и проверить систему
Передаточная функция тиристорного преобразователя (ТП)
Wтп = Т1Кртп+1,
передаточная функция двигателя
Wд (р)= Т22 р2 +К2ξдТ2 р +1 ,
где T1, T2 – постоянные времени, с;
Ттг , Кд – коэффициенты передачи;
ξ– коэффициент демпфирования.
Коэффициент передачи датчика положения – Кдп . Коэффициент передачи
редуктора - Кр .
2. Проверить систему на устойчивость по критерию, указанному преподавателем. Значения параметров для различных вариантов указаны в табл.3.3.
35

ДП
Д
PП TП
U3
Рис.3.6. Функциональная схема регулятора положения нажимных
винтов: РП – регулятор положения; ТП – тиристорный преобразователь; Д – двигатель; ДП – датчик положения нажимных винтов
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 3.3 |
|
|
|
|
|
|
|
|
Варианты задания |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Значения параметров |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
Кдв , |
|
|
|||
Вариант |
|
Кдп , |
|
Ктп , |
T , с |
|
T , с |
ξ |
|
|
Кр |
||||
|
рад |
|
|
рад |
|
|
|
рад |
|
|
|||||
|
|
|
|
|
|
||||||||||
|
|
|
1 |
|
2 |
|
|
|
|
||||||
|
|
с В |
|
с В |
|
|
|
|
|
с В |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
7 |
|
|
|
|
1 |
2 |
|
|
3 |
|
4 |
|
5 |
6 |
|
|
|
8 |
||
1 |
2 |
|
|
80 |
|
0,01 |
|
0,1 |
1,0 |
|
1 |
|
|
0,02 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
2 |
|
|
20 |
|
0,01 |
|
0,2 |
1,0 |
|
|
|
0,02 |
||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
3 |
2 |
|
|
100 |
|
0,03 |
|
0,1 |
1,2 |
|
|
|
0,01 |
||
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
4 |
3 |
|
|
18 |
|
0,01 |
|
0,5 |
1,2 |
|
|
|
0,01 |
||
|
|
|
|
|
|
|
|
|
|
|
0,6 |
|
|
|
|
5 |
3 |
|
|
14 |
|
0,01 |
|
0,2 |
1,2 |
|
|
|
0,05 |
||
|
|
|
|
|
|
|
|
|
|
|
0,6 |
|
|
|
|
6 |
3 |
|
|
16 |
|
0,02 |
|
0,5 |
1,3 |
|
|
|
0,05 |
||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
7 |
1 |
|
|
40 |
|
0,02 |
|
0,1 |
1,3 |
|
|
|
0,06 |
||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
8 |
1 |
|
|
30 |
|
0,03 |
|
0,2 |
1,2 |
|
|
|
0,06 |
||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
9 |
1 |
|
|
30 |
|
0,03 |
|
0,2 |
1,8 |
|
|
|
0,02 |
||
|
|
|
|
|
|
|
|
36 |
|
|
|
|
|
|
|

Продолжение табл.3.3
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
10 |
0,5 |
50 |
0,02 |
0,2 |
1,8 |
1 |
0,02 |
|
|
|
|
|
|
0,8 |
|
11 |
2 |
22 |
0,01 |
0,5 |
1,5 |
0,04 |
|
|
|
|
|
|
|
0,6 |
|
12 |
2 |
88 |
0,05 |
0,3 |
1,5 |
0,05 |
|
|
|
|
|
|
|
|
|
3.Если АСУ оказалась устойчивой, определить запасы устойчивости по
модулю и фазе.
4.Для неустойчивой АСУ предложить решение, обеспечивающее устойчивость системы и достаточные запасы устойчивости.
5.Сделать выводы.
4. АНАЛИЗ КАЧЕСТВА ЛИНЕЙНЫХ АСУ
Цель работы – исследование качества функционирования АСУ (АСР).
4 . 1 . Кратные сведения из теории
АСУ (АСР) должна обеспечить поддержание на определенном уровне или изменение по заданному закону некоторых физических величин, характеризую-
щих режим работы машин и агрегатов. Часто такими величинами являются час-
тота вращения, положение механизмов или технологические параметры – толщина проката, температура нагрева металла и т.п.
Нормально функционирующая АСР должна быть устойчивой и обеспечивать точность поддержания регулируемого параметра на требуемом уровне в ус-
тановившемся режиме, а также обеспечить определенный характер его изменения в переходных режимах.
Обобщенная структурная схема АСР представлена на рис. 4.1. Регулятор с передаточной функцией Wp (p) служит для обеспечения определенного качества
поддержания регулируемого параметра объекта управления y(t) на заданном
уровне y0 (t).
Таким образом, с одной стороны регулятор должен как можно точнее вос-
произвести задающее воздействие y0 (t), а с другой – свести к минимуму влияние возмущения z(t) на отклонение выходной величины от заданного значения.
Необходимым условием работоспособности системы является ее устойчивость.
37
В простейшем случае понятие устойчивости системы связано со способностью ее возвращаться в состояние равновесия после исчезновения внешних возмущений. Для линейной АСР математическим условием устойчивости является отрицательность вещественной части комплексных корней характеристического
уравнения.
Передаточные функции АСР (рис.4.1) по задающему и возмущающему
воздействиям имеют вид: |
|
|
|
y(p) |
|
|
|
Wо (p) |
|
|
|
|
|||||
WZ (p)= |
= |
|
|
; |
(4.1) |
||||||||||||
|
|
|
|
|
|
|
|
||||||||||
z(p) |
1+Wо (p) Wр (p) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||
W |
|
= |
y(p) |
|
= |
|
|
Wо (p) Wр (p) |
|
. |
|
(4.2) |
|||||
|
yо (p) |
1 |
+Wо (p) Wр (p) |
|
|||||||||||||
Y |
|
|
|
|
|
|
|
|
|||||||||
|
o |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Знаменатели этих передаточных функций (4.1) и (4.2) одинаковы и пред- |
|||||||||||||||||
ставляют собой левую часть характеристического уравнения |
|
||||||||||||||||
1 +Wо (p) Wр (p)= 0 . |
|
|
|
(4.3) |
|||||||||||||
Как следует из (4.3), корни характеристического уравнения зависят как от
параметров объекта, так и от параметров регулятора.
Расположение корней характеристического уравнения (4.1) определяет не
только устойчивость, но и влияет на характер переходного процесса. В практи-
ческих работах настоящего раздела предлагается исследовать влияние коэффициента усиления регулятора Кр и времени чистого запаздывания τ на качество
переходных процессов. Значения этих параметров, при которых система нахо-
дится на границе устойчивости, называют критическими: Кр.кр. и τкр (см. раздел
3). Эти значения могут быть определены с помощью критериев устойчивости.
Часто качество регулирования оценивают по характеру переходного процесса и
статической точности системы.
Качество регулирования для данного объекта управления зависит от алгоритма функционирования регулятора – закона регулирования. Закон регулирования – это математическая зависимость между выходом регулятора U (t) – ре-
гулирующим воздействием и отклонением ε(t) регулируемой величины y(t) от заданного значения y0 (t) (рис.4.1).
Показатели качества, определяемые непосредственно по кривой переход-
ного процесса, называют прямыми оценками.
Прямые оценки получают непосредственно по переходной характеристике h(t), т.е. по реакции системы не единичный ступенчатый сигнал при нулевых начальных условиях. Эта характеристика может быть получена для выходной величины y(t) или для ее отклонения ε(t) от заданного значения.
38

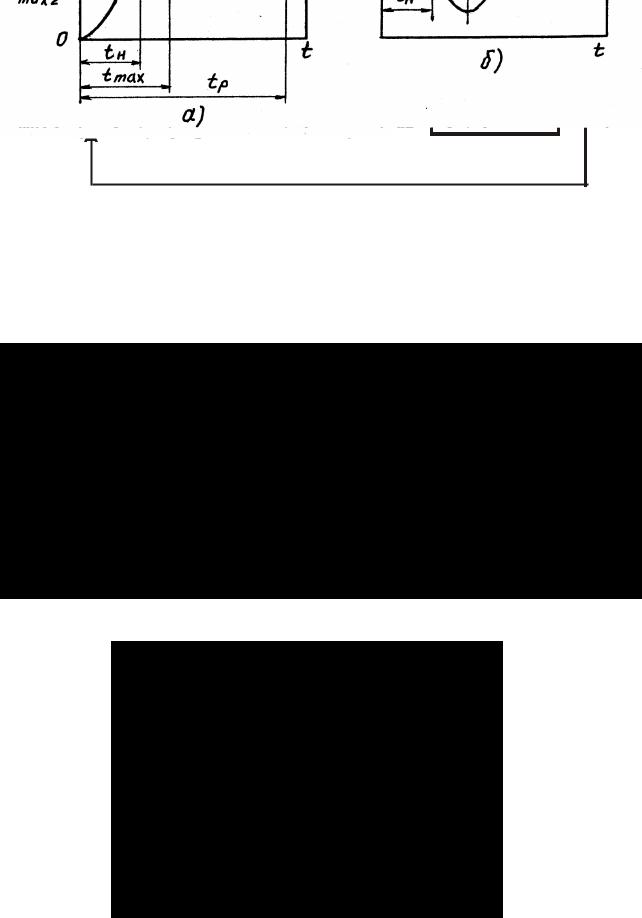
Кпрямым оценкам качества относятся следующие (рис.4.2).
1.Время регулирования – минимальное время, по истечении которого регулируемая величина будет оставаться близкой к установившемуся значению с
заданной точностью, т.е. |
|
h(t)− hуст |
|
≤ (здесь |
– величина, значение которой |
|
|
нужно оговаривать). |
|
|
|
||
2. |
Перерегулирование |
|
|
|
|
|
σ = |
hmax1 − hуст |
100% . |
(4.4) |
|
|
|
||||
|
|
hуст |
|
|
|
Обычно σ =10...30%. |
|
|
|
||
3. |
Частота колебаний |
|
|
|
|
|
|
ω = 2π |
, |
|
|
|
|
|
ТК |
|
|
где ТК |
– период колебаний. |
|
|
|
|
4. Колебательность переходного процесса определяется числом колебаний n за время переходного процесса. Чаще всего допускается n =1 ÷2 , иногда 3 ÷4 , но в некоторых случаях колебания в системе недопустимы.
5.Время достижения первого максимума tmax .
6.Время нарастания переходного процесса tн .
7.Декремент затухания.
χ = |
|
hmax1 − hуст |
|
. |
(4.5) |
|||
|
|
|
|
|
|
|||
|
|
|
|
|||||
|
h |
− h |
уст |
|
||||
|
|
|
|
|
||||
|
|
max 2 |
|
|
|
|||
Переходные процессы, возникающие в устойчивых системах при скачко-
образных воздействиях, принято делить на три группы: монотонные, апериодические и колебательные (рис.4.3).
В тепловой автоматике приняты типовые переходные процессы в АСР трех
видов (рис.4.4): апериодический, с 20-процентным перерегулированием или с
|
|
∞ |
|
минимальной квадратичной оценкой качества I2 = ∫ y2 dt |
(при этом величина |
||
|
|
0 |
|
перерегулирования достигает 40 ÷45% ). |
|
||
|
При анализе качества оценивают следующее: |
|
|
- соответствует ли вид переходного процесса желаемому; |
|||
- чему равно максимальное динамическое отклонение |
y1 выходной вели- |
||
|
чины; |
|
|
- |
перерегулирование σ = |
y2 100% ; |
|
|
|
y |
|
|
|
1 |
|
39
z(t)
y0(t) |
|
ε(t) |
p |
U(t) |
W0(p) |
y(t) |
|
|
|
W (p) |
|
|
|
Рис. 4.1. Структурная схема АСР: y0 (t) – задающее воздействие; z(t) - возмущающее воздействие; Wp (p) – передаточная функция регулятора; W0 (p) – передаточная функция объекта управ-
ления; U (t) – управляющее воздействие; ε(t) – ошибка
управления
Рис.4.2. Кривые переходного процесса для скачкообразного измене-
ния задания: а – для выходной величины; б – для отклонения
Рис.4.3. Виды переходных процессов: 1 – монотонный; 2 – апериодический; 3 – колебательный
40
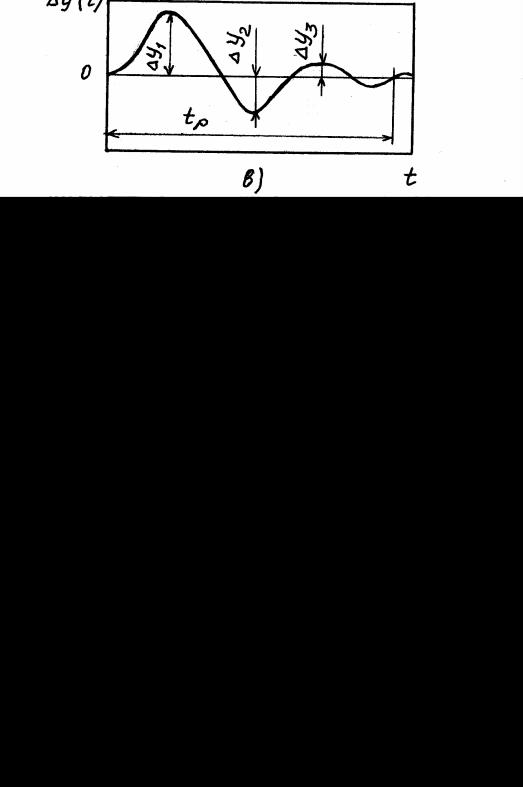
Рис.4.4. Типовые переходные процессы (реакция на возмущающее воздействие): а – апериодический с минимальным временем регулирования; б – с 20%-ым перерегулированием; в – с min ∞∫ y2 (t)dt
0
41

-время регулирования t р ;
-статическая ошибка yст .
Величина максимального возмущения приведенного по входу объекта, задается.
4 . 2 . Программа выполнения работы
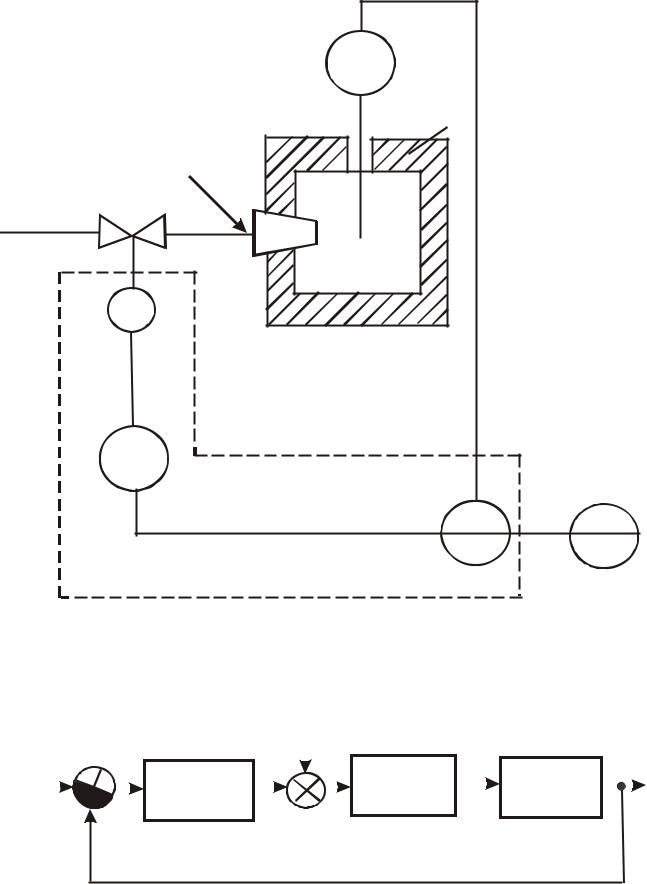
4.2.1. Исследование влияния времени запаздывания на характер переходных процессов в АСР температуры в методической печи
На рис.4.5 показана замкнутая система регулирования температуры печи. Чувствительным элементом – датчиком температуры является термоэлектрический преобразователь 2. Информация о значении температуры в печи θ, а также сигнал о заданном значении θ0 (от задатчика 3) поступают в регулятор 4. Сравнивающий элемент регулятора определяет отклонение ε = θ0 −θ, и регулятор вырабатывает регулирующее воздействие, обеспечивающее перемещение регулирующего органа 7 (поворотной заслонки в трубопроводе топлива) и направленное на устранение отклонения. Если температура в печи выше заданной, то
расход топлива уменьшается, если ниже – увеличивается.
Передаточная функция печи может быть представлена в виде
W0 (p)= T0Kp0+1e−pτ0 ,
где K0 – коэффициент передачи;
T0 – постоянная времени;
τ0 – время запаздывания.
Вэтом случае структурная схема АСР может быть представлена в виде, показанном на рис.4.6, где Wр (p) – передаточная функция регулятора. Про про-
порциональном регуляторе Wр (p)= K р .
В данной работе необходимо:
1. Для заданных значений параметров объекта и регулятора определить
критическое время запаздывания указанным преподавателем способом.
В таблице 4.1 приведены варианты с указанием значений параметров τ0 ,
T0 , K0 и Кр .
2. Из типовых функциональных блоков Simulink создать модель АСР в соответствии со структурной схемой (рис.4.6).
42
|
|
TE |
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
воздух |
|
|
|
топливо |
7 |
|
|
|
|
5 |
|
|
|
|
№5 |
θ |
|
|
|
|
|
|
|
|
6 |
|
|
|
|
регулятор |
TC |
θ0 |
H |
|
|
4 |
|
3 |
Рис.4.5. Функциональная схема АСР температуры
|
|
|
|
|
|
z |
|
|
θ |
||||
θ0 |
|
|
Wp(p) |
|
|
|
|
|
K0 |
|
|
e-pτ |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
T0 p+1 |
|
|
|
||
Рис. 4.6. Структурная схема АСР температуры
43