

2.8 Вибір та описання перетворювачів для живлення електроприводу
Найефективнішим регулюванням координат електроприводу в наш час є використання для двигунів постійного струму керованих випрямлячів, які працюють по системі тиристорний перетворювач - двигун (ТП–Д) з мікропроцесорним керуванням. Така система дозволяє за допомогою РІС-контролера автоматизувати практично всі можливі режими роботи електроприводу.
Основним типом перетворювачів найбільш поширеним в наш час є напівпровідникові статичні перетворювачі та в першу чергу тиристорні. Вони являють собою керовані чи некеровані випрямлячі, зібрані по нульовій чи мостовій однофазній чи трьохфазній схемі. Оскільки в даному проекті використовується електропривод з реверсивною схемою - є необхідністю розглянути принцип дії, структуру, особливості, недоліки та переваги даної схеми.
В таких керованих випрямлячах використовуються два основних типи керування комплектами вентилів: сумісне та роздільне.
Сумісне керування (дивись рисунок 2.7 ) передбачає подачу імпульсів от системи імпульсно-фазного керування тиристорами (СІФК) імпульсів керування Ua одночасно на вентилі обох комплектів - VS1, VS3, VS5, (катодна група) та VS2, VS4, VS6 (анодна група). При цьому за рахунок наявності кута зміщення між імпульсами керування двох комплектів, близького до , один з комплектів працює в випрямляючому режимі, а інший - в інверсному.
Роздільне керування використовується для повного виключення зрівняльних струмів між комплектами реверсивного ТП. Сутність його складається в тому, що імпульси керування подаються тільки на один з комплектів, котрий повинен проводити струм в даний момент. На другий комплект імпульси не подаються і він не працює, „зачинений”.
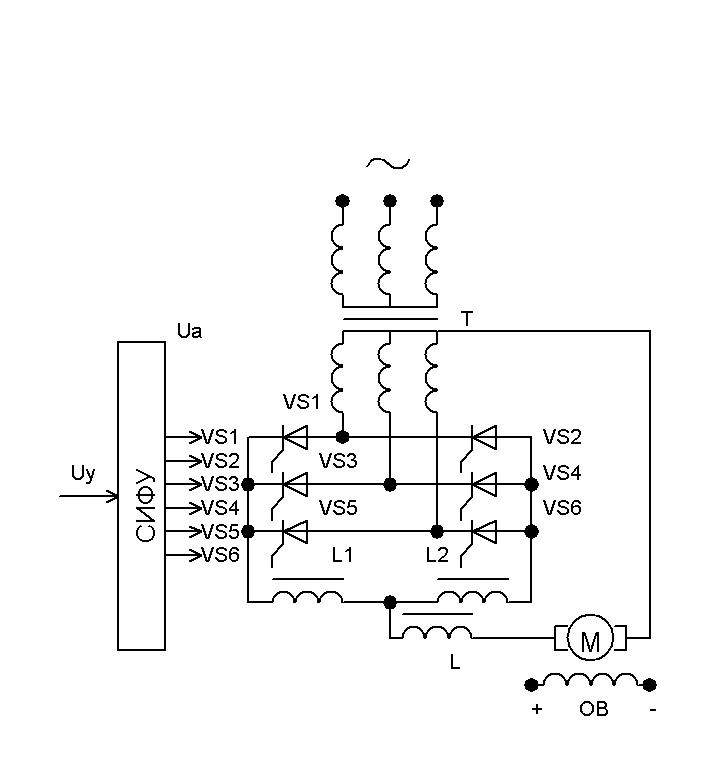
Рисунок 2.7 – Схема ТП з реверсивним керуванням з нульовим виводом
Керування перетворювачем здійснюється за допомогою спеціального логічного перемикаючого пристрою (ЛПП). Цей пристрій веде контроль за струмом перетворювача, забезпечує в функції вхідного сигналу Uy вмикання в роботу та вимикання комплектів з невеликою затримкою в 10-15 мс. Як наслідок цього при переході ДПС з одного енергетичного режиму в інший поблизу осі швидкості має місце режим перервних струмів, що відображається в не лінійності характеристик ДПС.
До переваг розглянутої схеми відносяться: плавність та значний діапазон регулювання швидкості; висока жорсткість отриманих штучних характеристик; високий ККД електроприводу; безшумність в роботі; простота обслуговування та експлуатації.
Недоліки: перетворювач має односторонню провідність; для отримання характеристик у всіх чотирьох квадратах необхідно використовувати реверсивний двокомплектний перетворювач; напруга на якорі та струм мають пульсуючий характер, що погіршує умови роботи двигуна; для зниження пульсацій в більшості випадків використовують спеціальні реактори; з ростом діапазону регулювання швидкості знижується коефіцієнт потужності електроприводу; вентильний електропривод вносить спотворення в форму струму та напруги мережі живлення, що негативно впливає на роботу інших приймачів електроенергії; ТП мають низьку стійкість до перешкод та мають низьку перевантажувальну здатність Пол струму та напрузі.
Висновок:
Кінцево вибираємо для регулювання
координат електроприводу керований
випрямляч типу SIMOREG
6RA7018-6D
S22-0
з мікропроцесорним керуванням з
функціями автоматизованого пуску з
обмеженням струму, регулюванням швидкості
нижче основної та динамічним гальмуванням
в функції часу, який має такі параметри:


2.9 Вибір та описання резервної РКС керування електроприводом
Ціль: Вибір РКС керування ДПС з шунтовою обмоткою збудження.
Задачі:
- призначення РКС, основна їх апаратура;
- вибір існуючої РКС керування ДПС, яка вдовольняє умовам завдання.
Релейно-контактна апаратура, як правило реалізує розімкнену схему керування двигуном. В цих схемах не будуються зворотні зв’язки по координатам чи технічним параметрам, які приводяться в рух робочої машини чи виробничого механізму. Ці схеми відрізняються простотою своєї реалізації та широко використовуються в електроприводах, де не вимагається висока якість керування електроприводом в вчасності для виконання таких функцій, як пуск, реверс та гальмування.
Ці функції закладені в завданні.
Релейно - контактні схеми виконуються на базисі електричних апаратів ручного та дистанційного керування. До апаратів ручного керування належать кнопки та ключі керування, командоконтролери, рубильники, пакетні вимикачі та контролери. До апаратів дистанційного керування відносять контактори, магнітні пускачі, електромагнітні реле.
Для виконання РКС керування вибирається типова схема пуску двигуна в два ступені в функції ЕРС та динамічного гальмування.
Для пуску двигуна в „прямому” напрямку натискаємо кнопку SB1, котушка КМ1 замкне свої контакти КМ1.2 та КМ1.3 і підключить двигун до мережі живлення через пускові резистори Rпуск1 та Rпуск2. Двигун починає розгін по штучній механічній характеристиці. При досягненні двигуном визначеної швидкості, що супроводжується зменшенням падіння напруги, котушка КМ3 отримає достатній рівень напруги та замкне свій контакт КМ3.1, що відімкне резистор Rпуск1 та виведе двигун на іншу штучну механічну характеристику. При досягненні двигуном номінальної швидкості спрацює котушка КМ4 та відімкне резистор Rпуск2 та виведе двигун на натуральну механічну характеристику. Таким чином пуск двигуна завершиться. Крім того котушка КМ1 розімкне нормально замкнений контакт КМ1.6 для захисту від самопуску.
Для гальмування двигуна необхідно натиснути кнопку SB3 котушка КМ1 втратить живлення та відімкне двигун від мережі. Також вона розімкне свій контакт КМ1.5 в ланцюзі реле затримки КТ1, почнеться відлік часу, після чого реле часу замкне свій контакт КТ1.1 та підключить котушку КМ5 до мережі живлення. В свою чергу котушка КМ5 замкне свій контакт КМ5.1 та зашунтує двигун на резистор Rдин. Відбудеться динамічне гальмування.
Для реверсу слід натиснути кнопку SB2, котушка КМ2 замкне свої контакти КМ2.2 та КМ2.3 і підключить двигун до мережі живлення, але вже з іншою полярністю. Для гальмування необхідно знову натиснути кнопку SB3.
Схема представлена на рисунку 2.8 - Схема пуску ДПС з реверсом та динамічним гальмуванням.

Рисунок 2.8 – Схема пуску ДПС з реверсом та динамічним гальмуванням
ВИСНОВКИ
Робота над курсовим проектом дозволила розширити загальний і професійний рівень підготовки студента.
Результатом проблемної роботи являється розрахунково-пояснювальна записка і графічна частина.
Робота над текстом і змістом розрахунково - пояснювальної записки дозволила поліпшити загальну і технічну підготовку студента, придбати необхідні навички роботи з навчальною і технічною літературою, удосконалити знання Української мови.
Проблемна робота цілком відповідає завданню на курсове проектування, виконанні всі необхідні розрахунки, малюнки, таблиці.
Проект містить практично всі матеріали, необхідні для реальної роботи для схеми електроприводу механізму циклічної дії.
Розрахунки мають техніко - економічне обґрунтування.
Розрахунково - пояснювальна записка, виконана на комп'ютері з застосуванням сучасного текстового редактору, графічна частина виконана методом креслення.
Вважаю, що мета, поставлена завданням на курсове проектування, цілком виконана.