

1/С б а в г m,h·м
а - абсолютно жорстка механiчна характеристика;
б, в - жорсткі механiчнi характеристики;
г - м’яка механiчна характеристика.
Рисунок 2.2 – Види механічних характеристик електродвигунів
Абсолютно жорстку характеристику мають СД, в яких будь-яка зміна навантаження М не призводить до змін швидкості.
Жорстку характеристику (б, в) АД та ДПС змішаного чи незалежного збудження. Для цих двигунів характерним є незначне зменшення швидкості зі збільшенням навантаження (двигун працює тільки на прямолінійній ділянці характеристики).
М’яка механічна характеристика (г) властива ДПС із послідовним збудженням. При будь-якій зміні навантаження швидкість обертання двигуна змінюється достатньо сильно. Таку характеристику бажано мати для транспортних та підйомних механізмів.
Механічна характеристика механізму головного підйому має вигляд (дивись рисунок 2.3).
1/с а б 0 -M M,H·м
Рисунок 2.3 – Механічна характеристика вантажопідйомного механізму
Для аналізу стійкості порівняємо механічну характеристику ДПС незалежного збудження та характеристику приводу підйомного крана (дивись рисунок 2.4)
1/С а б в м1 Мн н м2
Рисунок 2.4-Аналіз стійкості системи
З характеристики видно, що привод працює стійко в точці (б), так як в цій точці дотримується рівновага моментів - статичного моменту опору Мс та обертового електромагнітного моменту М.
Припустимо, що по якимсь причинам швидкість обертання двигуна підвищилася до значення 1 при цьому момент навантаження не змінився, а обертовий момент двигуна знизився до значення М1. Надлишок статичного моменту двигуна почне гальмуватись та повернеться в точку стійкості роботи (б).
При зменшенні швидкості до значення 2 двигун починає збільшувати її за рахунок надлишкового обертового моменту М2 та двигун повертається в точку стійкості роботи (б).
Висновок: ДПС незалежного збудження з точки зору стійкості підходить для приводу механізму підйомного крана.
Нижче приводиться аналітичний розрахунок та побудова механічної характеристики.
Номінальний момент двигуна обчислюємо за паспортним даними

де
 -
номінальна потужність двигуна, кВт;
-
номінальна потужність двигуна, кВт;
 -
номінальна частота обертання,
-
номінальна частота обертання, ;
;
 -
номінальна кутова швидкість,
-
номінальна кутова швидкість, ;
;

Швидкість ідеального холостого ходу

де
 - номінальна напруга, В;
- номінальна напруга, В;
Ф- магнітний потік, Вб;
 -
номінальний
струм якоря,
при
незалежному збудженні двигуна.
-
номінальний
струм якоря,
при
незалежному збудженні двигуна.
Визначаемо максимально припустимий момент двигуна при пуску

Для заданого числа щаблів пускового реостата знаходимо відношення пускового моменту до моменту перемикання.

де
 ,
Ом - опір якоря, що включає опір обмотки
якоря, додаткових полюсів
і
щіток;
,
Ом - опір якоря, що включає опір обмотки
якоря, додаткових полюсів
і
щіток;
 Ом
- опір якірного ланцюга на першому щаблі
пускового реостата.
Ом
- опір якірного ланцюга на першому щаблі
пускового реостата.

Величина
 знаходиться зі співвідношення
знаходиться зі співвідношення

Опір якоря визначається по формулі

Знаходимо момент перемикання

При цьому повинна дотримуватися умова:



Умова виконується, значить двигун споконвічно обраний вірно.
Розрахунок пускових опорів можна зробити аналітично за вираженням:

 ;
;
 ;
;
 ;
;
За
знайденим значенням опорів ,
, ,
, знаходять додаткові опори для кожної
секції:
знаходять додаткові опори для кожної
секції:
 ;
;
 Ом;
Ом;
 Ом;
Ом;
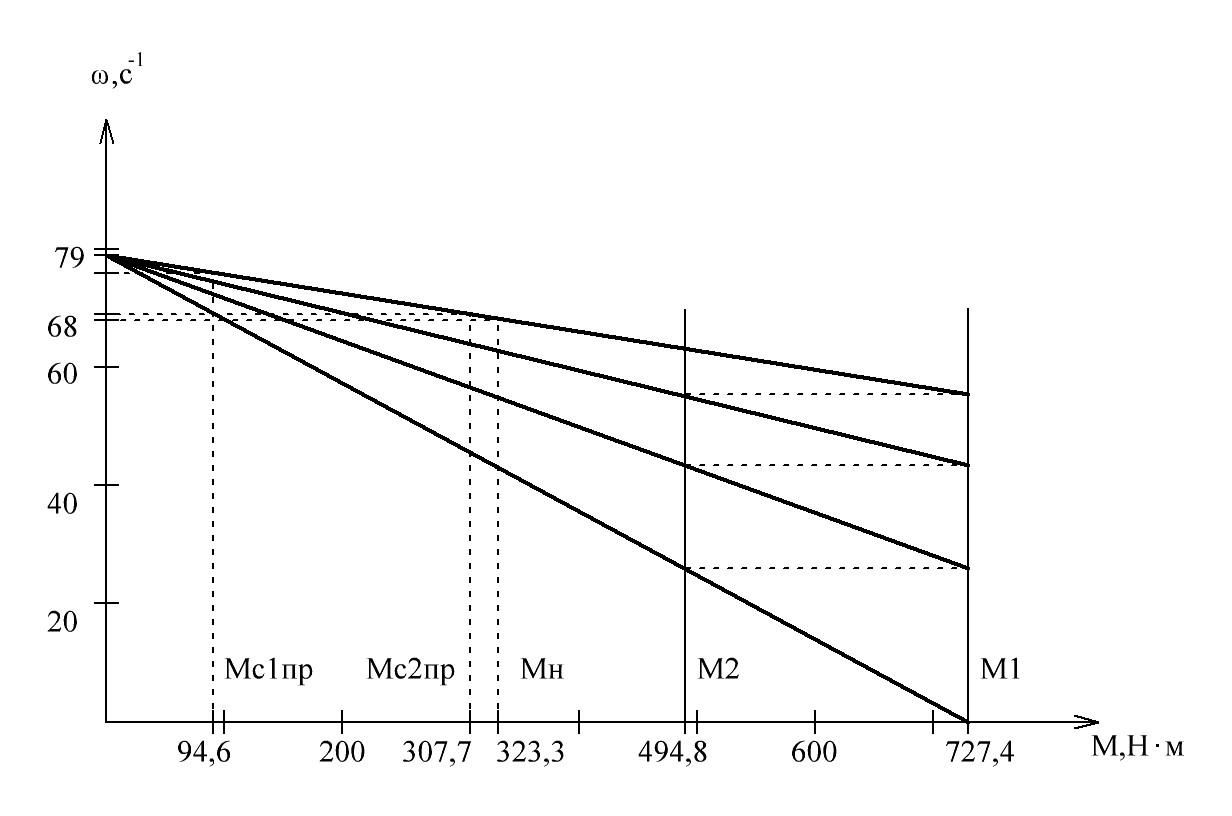

Рисунок 2.5 – Механічні характеристики двигуна постiйного струму з шунтовою обмоткою збудження
2.6 Перевірка вибраного двигуна по нагріву
Двигуни вибрані розрахунковим шляхом в обов’язковому порядку повинні бути перевірені по нагріву.
Допускається не перевіряти по нагріву двигуни тривалого режиму роботи з будь-якими видами навантаження - незмінна, змінна, різко змінна.
Це пояснюється тим, що двигун тривалого режиму роботи розраховується та вибирається по максимальному робочому моменту навантаження в той час, як двигуни повторно-короткочасного режиму роботи вибираються по еквівалентним значенням потужності моменту та струму.
Існують два метода перевірки: прямий та непрямий.
Прямий метод полягає в визначенні кількості тепла, виділеного в електричній машині при роботі та відданого в навколишню середу.
Цей метод дуже складний із - за великого об’єму різних матеріалів, які входять в електродвигун та які мають різні теплові характеристики.
На практиці частіше всього користуються непрямим методом, який базується на визначенні повного еквівалентного значення моменту, струму чи потужності, які зрівнюються з аналогічними величинами приведеними до валу електродвигуна.
При визначенні еквівалентних величин необхідно враховувати всі динамічні моменти, виникаючі як при пуску так і при гальмуванні та регулюванні швидкості. В даному проекті регулювання швидкості при роботі не передбачається. Тому необхідно враховувати тільки пуск та гальмування.
Розрахунок повного еквівалентного моменту виконується на основі уточненої навантажувальної діаграми електродвигуна (дивись рисунок 2.6).
Динамічні моменти при розгоні та гальмуванні:




Час роботи двигуна при установленій швидкості у першому робочому режимі

Час роботи двигуна при установленій швидкості у другому робочому режимі

Визначаємо еквівалентний момент двигуна на робочій ділянці характеристики




При вірно вибраному двигунi за потужністю повинна виконуватись умова


Висновок: Остаточно обираємо двигун типу Д806.
2.7 Вибір способу регулювання координат електродвигуна
Основними об’єктами регулювання електроприводів є швидкість. Регулювання швидкості характеризується наступними показниками:
- Діапазон регулювання - це відношення максимально можливої швидкості обертання до мінімального значення.
- Стабільність швидкості характеризується величиною зміни швидкості при змінах навантаження на валу.
- Плавність регулювання швидкості характеризується зміною швидкості обертання при переході з однієї механічної характеристики на іншу.
- Напрямок регулювання - це регулювання вище чи нижче номінальної швидкості обертання.
- Допустиме навантаження при регулюванні характеризує зміну теплового режиму двигуна при регулюванні швидкості.
- Економічність регулювання характеризує співвідношенням капітальних затрат на пристрій регулювання та експлуатаційних витрат при обслуговуванні та ремонті системи регулювання.
Регулювання струму та моменту необхідне в основному при пуску та гальмуванні електродвигуна. При цьому виникає необхідність як збільшення струму та моменту при пуску, так і зменшення пускових струмів та моментів для двигунів більшості загально промислових механізмів. При гальмуванні практично використовують тільки зменшення величини струму при дії гальмівного моменту.
Регулювання положення електроприводу характеризується точкою шляху в якій виконується гальмування чи пуску електроприводу, це є приводи в основному підйомних та транспортних механізмів.
Висновок: Для механізму циклічної дії передбачаємо регулювання швидкості, обмеження пускового струму, динамічне гальмування.