

Приложение (для тепловых специальностей) Номенклатура пусковых устройств
|
№№ пп |
Наименование |
Тип |
Назначение, характеристика |
|
1 |
Пускатель магнитный реверсивный |
ПМРТ–1 |
Контактный для управления трехфазным асинхронным двигателем мощностью 0,27 кВт при напряжении 220/380 В |
|
2 |
Пускатель магнитный реверсивный |
ПМРТ–2 |
То же для двигателя мощностью 0,4…14,0 кВт |
|
3 |
Магнитный усилитель (пускатель) |
МУ–2Э |
Бесконтактный, для управления двухфазным асинхронным двигателем. Входное сопротивление 160 ом |
|
4 |
Магнитный усилитель (пускатель) |
МУ–2Б |
То же, входное сопротивление 5 кОм |
|
5 |
Магнитный усилитель (пускатель) |
УМД |
То же |
|
6 |
Тиристорный усилитель (пускатель) |
ПРБ–2 |
Бесконтактный, для управления двухфазным асинхронным двигателем. Входное сопротивление l60 Ом |
|
7 |
Тиристорный усилитель (пускатель) |
ПРБ–2М |
То же |
|
8 |
Тиристорный усилитель
|
У–101 |
Бесконтактный. для управления трехфазным асинхронным двигателем с короткозамкнутым ротором |
|
9 |
Тиристорный усилитель |
У–23 |
То же |
Исполнительные механизмы с электродвигателями типа АОД
|
Марка механизма |
Крутящий момент, кгс м |
Время полного хода, с |
Мощность электродвигателя, кВт |
Тип пускателя |
|
МЭОК–25/100 МЭОК–63/100 МЭОБ–25/100 МЭОБ–63/100 |
25 63 25 63 |
100 100 100 100 |
0,27 0,4 0,27 0,4 |
ПМРТ–1 ПМРТ–2 У101 У101 |
Номенклатура регулирующих органов
|
Наименование |
Тип |
Условный диаметр входного сечения Dу, мм |
|
Заслонка малого сопротивления |
ЗМС |
30, 35, 40, 45, 50, 60, 70, 80, 90 |
|
Поворотная регулирующая заслонка |
ПРЗ
|
100, 125, 150, 175, 200, 225, 250, 300, 350, 400, 450, 500
|
|
Дроссель холодный |
ДХ |
50, 70, 80, 100, 125, 150, 200, 250, 300, 350, 400, 450, 500, 600, 700, 800 |
|
Дроссель холодный отсечной |
ДХО |
125, 150, 200, 250, 300, 350, 400, 450, 500, 600, 700, 800 |
|
Дроссельный клапан на подвод горячего воздуха |
ДП |
125, 150, 200, 250, 300, 350, 400, 450 |
|
Дроссель горячий |
ДГ |
125, 200, 250, 300, 350, 400, 450, 550, 650, 750, 850 |
Основные размеры поворотных клапанов
|
Тип |
Размеры канала | ||
|
высота, мм |
ширина, мм |
площадь, дм2 | |
|
КП–0,5 КП–0,65 КП–0,8 КП–1 КП–1,5 КП–2 КП–3,5 КП–4,5 КП–5,5 КП–6,5 |
900 1023 1085 1214 1540 1568 2122 2448 2774 3030 |
580 696 812 928 1160 1276 1624 1856 2088 2320 |
0,48 0,56 0,81 1,04 1,64 1,95 3,17 4,17 5,34 6,45 |
Примечание: Условное обозначение поворотного клапана включает буквы КП (клапан поворотный) и цифру, соответствующую номинальной величине проходного сечения (в дм2).
ОСНОВЫ МИКРОПРОЦЕССОРНОЙ ТЕХНИКИ
Управление технологическим процессом в металлургических агрегатах можно представить в виде последовательности логических действий, реализующих цели управления. Поэтому в АСУ ТП давно широко применяются логические элементы: триггеры, счетчики, сумматоры, шифраторы.
Логические устройства дискретного действия оперируют лог. 0 и лог. 1, которые физически представляют собой, соответственно, пассивное и активное состояние линии передачи или ячейки памяти. При этом лог. 0 соответствует напряжению на линии в диапазоне 0…0,4 В (которое интерпретируется как отсутствие сигнала), а лог. 1 – 2,4…6,0 В (наличие сигнала).
В соответствии с правилами математической логики логический элемент формирует выходные сигналы, однозначно связанные с возможными комбинациями входных сигналов.
Развитие промышленной электроники привело к созданию принципиально новых ТСА – микроконтроллеров, которые основаны на микропроцессорах и предназначены для управления сложными технологическими агрегатами.
Микроконтроллеры (МК) используются в составе многих КИПиА, на основе которых создаются децентрализованные САУ. МК встраиваются в станки с ЧПУ, установки промышленного телевидения, устройства технологической диспет-черизации и т.п. В настоящее время МК широко применяются не только в промышленности, но и в быту: в телевизорах, видеомагнитофонах, СВЧ-печах, стиральных машинах, часах, калькуляторах, мобильных телефонах.
В широком смысле микропроцессор (МП) представляет собой функционально законченное программно-управляемое устройство, осуществляющее прием, арифметико-логическую обработку и выдачу цифровой информации.
МП состоит из интегральных микросхем или представляет собой монокристалл. По сути, МП – простой конечный автомат, который выполняет операции с информацией в виде электрических сигналов в соответствии с заложенной в него программой. Для хранения программ используются ПЗУ (ROM). Для хранения промежуточных результатов и вспомогательных величин используется оперативная память – ОЗУ (RAM). Но при выключении питания информация в ОЗУ, как правило, пропадает.
Ядром микропроцессора является арифметико-логическое устройство (АЛУ), в котором выполняются простейшие операции: сложение и вычитание двоичных чисел, логические операции И и ИЛИ, переадресация данных.
Микроконтроллер (МК) – это МП-система с устройствами ввода-вывода информации, прерывания, таймерами, компараторами и т.п. МК используются в составе многих КИПиА, на основе которых создаются децентрализованные САУ.
Процессор работает с портами ввода/вывода (port I/O) практически так же, как и с ячейками памяти. У каждого порта есть свой собственный адрес. Причем ячейки памяти и порты находятся в разных адресных пространствах.
Порты вывода предназначены для управления внешними устройствами (цифро-аналоговые преобразователи (ЦАП), индикаторы, принтеры). К этим портам можно подключать электронные ключи, которые позволяют МП системе управлять более мощными устройствами – электромагнитными реле, лампочками, светодиоды, моторчиками, соленоидами и т.п.
При помощи портов вывода можно делать переключения в самой схеме микропроцессорного устройства для его автоматической подстройки под выполняемую задачу.
Порт ввода – это специальная схема, при помощи которой МП может принимать внешние данные, например, информацию о ходе технологического процесса или состоянии оборудования. Для ее преобразования в цифровой код применяются специальные модули, например, ADAM фирмы ADVANTECH. К портам подключают средства ручного ввода (клавиатуру, различные кнопки), дискретные и RS интерфейсы приборов, АЦП и т.д.
Главным управляющим элементом всей микропроцессорной системы является процессор (рис. 1). Остальные же устройства – «периферия» – являются ведомыми. Все узлы микропроцессорной системы соединены между собой при помощи трех основных шин. Каждая шина представляет собой набор проводников (разрядов), по которым происходит параллельная передача двоичных чисел в электронной форме.
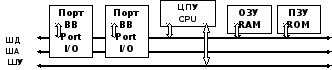
Рис. 1. Принципиальная схема микропроцессорной системы
Шина данных (DATA bus)
Эта шина предназначена обмена данными микропроцессора с периферийными устройствами. Она должна иметь не менее 8-ми разрядов для передачи информации по байтам (1 байт = 8 бит, 1 байт / с = 1 бод, 1 Кбайт = 1024 байт). 16-тиразрядная шина данных может за один такт передавать 2 байта, 32-разрядная шина – 4 байт, 64-разрядная – 8 байт.
Шина адреса (ADDR bus)
В отличие от шины данных, двоичные числа, передаваемые по шине адреса представляют собой адрес ячейки памяти или порта ввода/вывода, к которому в данный момент обращается процессор. Минимальное количество разрядов адресной шины – 16.
Шина управления (CONTROL bus)
В шину управления условно объединяют набор линий, передающих управляющие сигналы от процессора к периферийным устройствам и обратно. В любой шине управления присутствуют линии, передающие сигналы:
RD (Read) – чтение
WR (Write) – запись
MREQ – инициализация устройств памяти (ОЗУ или ПЗУ)
IORQ – инициализация портов ввода/вывода
READY – готовность
RESET – сброс
По отношению к любым периферийным устройствам, центральный процессор может выполнять в каждый момент времени одну из четырех основных операций: чтение или запись в ячейку памяти, чтение из порта ввода и запись в порт вывода.
Например, процесс записи данных в память происходит следующим образом:
а) сначала центральный процессор выставляет на адресную шину адрес ячейки памяти;
б) затем на шину данных выставляется байт информации, предназначенный для записи в эту ячейку;
в) после чего активизируется сигнал MREQ, дающий доступ к модулю памяти;
г) затем процессор устанавливает сигнал WR в активное состояние. Происходит запись байта в адресованную ячейку памяти.
Для того, чтобы прочитать байт из ячейки памяти, процессор сначала устанавливает на шине данных адрес нужной ячейки. Затем он устанавливает в активное состояние сигнал MREQ, который поступает на устройства памяти и служит разрешением для их работы. При этом сигнал IORQ остается равным лог. 1, поэтому порты ввода/вывода микропроцессорной системы остаются неактивными.
Далее, процессор переводит в активное состояние сигнал RD. Этот сигнал поступает как на устройства памяти, так и на порты ввода/вывода. Однако порты не реагируют на него, так как они отключены высоким уровнем сигнала IORQ. Устройство памяти, напротив, получив управляющие сигналы RD и MREQ, выдает на шину данных байт информации из той ячейки памяти, адрес которой присутствует в этот момент на шине адреса.
Операции чтения из порта и записи в порт происходят аналогично операциям чтения/записи ОЗУ. Различие лишь в том, что вместо сигнала MREQ в активное состояние переходит сигнал IORQ, разрешающий работу портов.
Обобщенную структурную схему микроконтроллера рассмотрим на примере одного из самых распространенных однокристальных микро- контроллеров американской фирмы ATMEL – АТ89С2051 (рис. 2). Эта микросхема выполнена в стандартном DIР-корпусе и имеет 20 выводов. Напряжение питания микросхемы +5 В. Допускается разброс питающего напряжения от 2,7 В до 6 В, что обеспечивает высокую помехоустойчивость МК.
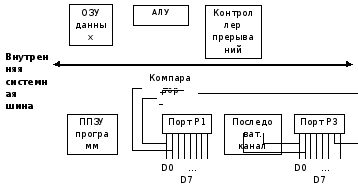
Рис. 2. Обобщенная структурная схема микроконтроллера
ППЗУ программ. Встроенное перепрограммируемое ПЗУ объемом 2 кБ выполнено по технологии электрически стираемого ПЗУ (так называемая «Флэш-память»). В эту память записывается программа, которую микроконтроллер начинает выполнять сразу после включения питания и окончания сигнала сброса.
Технология флэш-памяти допускает перепрограммирование, то есть повторную запись. Для этого информацию в ППЗУ сначала стирают. Стирание производится при помощи того же самого программатора. При этом используется повышенное напряжение (12 В). После этого в ППЗУ можно «зашивать» новую программу. Допускается до 1000 циклов записи/стирания.
ОЗУ данных состоит из 128 восьмиразрядных ячеек памяти. Как и в большинстве однокристальных МК, в микросхеме АТ89С2051 применяется принцип совмещения ОЗУ с регистрами общего назначения процессора и двумя восьмиразрядными портами ввода/вывода Рl и РЗ.
Арифметико-логическое устройство (АЛУ) заменяет здесь центральный процессор. Регистры для временного хранения данных, как уже говорилось, совмещены с ячейками ОЗУ.
Таймеры. В микросхеме имеются два встроенных 16-разрядных таймера/счетчика Тl и Т2. Они могут использоваться программистом для задания любых интервалов времени. Каждый счетчик может работать в двух режимах: режиме отсчета временных интервалов (в этом случае он считает импульсы внутреннего тактового генератора) и в режиме подсчета внешних импульсов.
Последовательный канал. Это канал специального типа для последовательной «побайтовой» передачи информации по одной линии. В любом компьютере всегда имеются последовательные интерфейсы (например, СОМl и СОМ2). Один из этих интерфейсов раньше часто используется для подключения манипулятора «мышь». А второй предназначен, в основном, для подключения модема. Подобный канал реализован и в микросхеме АТ89С2051. В результате имеется возможность создания микропроцессорных устройств, управляемых при помощи компьютера по последовательному каналу.
Порты Рl и РЗ – параллельные восьмиразрядные порты ввода/вывода.
Встроенный контроллер прерываний. Способен обрабатывать шесть источников прерываний. Два внешних входа для запросов на прерывание. Два прерывания от обоих счетчиков/таймеров ТI и Т2. Запрос прерывания таймера поступает в тот момент, когда соответствующий счетчик/таймер досчитает до нуля (счетчик работает в режиме обратного счета). И, наконец, последние два источника прерывания – от последовательного канала ввода/вывода. Один от передатчика этого канала. Он срабатывает в тот момент, когда процесс отправки очередного байта закончился. И один – срабатывает от приемника, когда тот принял очередной байт.
Аналоговый компаратор. Сравнивает величину двух аналоговых сигналов. На его выходе появляется сигнал лог. 1, когда напряжение на входе «+» превысит напряжение на входе «–».