

МIНIСТЕРСТВО ОСВIТИ І НАУКИ УКРАЇНИ Національний унiверситет "Львiвська полiтехнiка"
ПРОВЕДЕННЯ СТРУКТУРНОЇ ТА ПАРАМЕТРИЧНОЇ ІДЕНТИФІКАЦІЇ СКЛАДНИХ ОБ ЄКТІВ І СИСТЕМ.
МЕТОДИЧНІ ВКАЗІВКИ
до лабораторної роботи № 3 з курсу "Основи автоматизованого проектування
складних об’єктів і систем"
для студентiв базового напрямку 6.0804 "Комп'ютернi науки"
Затвердженона засiданнi кафедри ″Системи автоматизованого проектування"
Протокол N 1 вiд 27.08.2001р.
Львiв 2001
Проведення структурної та параметричної ідентифікації складних об єктів і систем.
Методичні вказівки до лабораторної роботи №3 з курсу “Основи автоматизованого проектування складних об`єктів і систем” для студентiв базового напрямку 6.0804 - "Комп'ютернi науки" / Укл. О.М.Матвійків - Львiв: НУ “ЛП”, 2001. - 21с.
Укладач: О.М.Матвійків, канд. техн. наук
Вiдповiдальний за випуск С.П.Ткаченко, канд.техн.наук, доц.
Рецензенти: Ю.В.Стех, канд.техн.наук, доц. I.I.Мотика, канд.техн.наук, доц.
2
1МЕТА РОБОТИ
•вивчити методологію та основні етапи рішення задачі ідентифікації для СОС
•отримати навики проведення структурної ідентифікації математичних моделей об`єктів
•отримати навики по вибору метода параметричної ідентифікації і порядку її проведення
2КОРОТКІ ТЕОРЕТИЧНI ВIДОМОСТI
2.1Основи задачі ідентифікації СОС
Задача ідентифікації, яка полягає в визначенні структури і параметрів об`єкта, виникає в двох випадках:
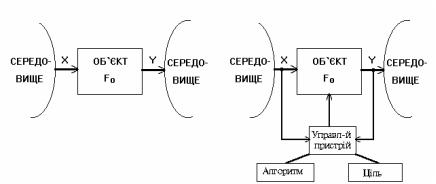
•при формуванні моделей з метою глибшого пізнання об`єктів і систем (рис.1а);
•при формуванні моделей з метою управління об`єктом чи системою (рис.1б).
Взаємодія довільного об`єкта з середовищем (для двох
приведених випадків) може бути представлена наступною схемою.
а) |
б) |
Рис.1. Схема взаємодії об`єкта з середовищем.
3
Суттєвою особливістю побудови моделей першого типу являється необхідність відображення механізмів об`єкта або явища в структурі оператора Fo , тобто всіх пичинно-наслідкових зв`язків об`єкта, виявлених в процесі ідентифікації.
В другому випаду в процесі ідентифікації повинна бути створена модель, котра могла б задовільняти вимогам управління. Вона може і не відображати внутрішніх механізмів об`єкта, а тільки константувати наявність певного формального зв`язку між входом і виходом. Метою управління являється перевід об`єкта в певний необхідний стан - розбивається на два етапи : 1) синтез адекватної моделі об`єкта ; та 2) синтез управління на основі цієї моделі.
Взаємодія між об`єктом, що ідентифікується і середовищем здійснюється по каналах Х та У, а управління - по U. По Х середовище діє на об`єкт, а по У - об`єкт діє на середовище. По Х` - управляючий пристрій отримує неуправляєму, но контролюєму складову зі сторони середовища. Для зворотнього зв`язку, інформація по каналі У` попадає на управляючий пристрій. Загальний зв`язок між вхідними та вихідними параметрами можна умовно записати у вигляді:
У=Fо(X) або Y=Fo(X,U), |
(1) |
При цьому, задача ідентифікації зводиться до визначення (синтеза) модельного оператора F , що зв`язує вхід і вихід об`єкта, тобто в отриманні оцінки Fo. Очевидно необхідно, щоб F був близьким до Fo відносно деякого критерію.
Задача ідентифікації, як задача побудови оператора моделі що відображає якісні і кількісні сторони об`єкта, може бути сформульована та відповідно розвязуватись трьома різними підходами (рис. 2):
1.Для статичних нестохастичних (детермінованих) об`єктів в задачах ідентифікації застосовується теорія наближення функцій многочленами. Цей напрямок пов`язаний з представленням функцій у вигляді розкладу по деякій системі функцій (найчастіше по системі поліномів). Теорія наближення має дві гілки - теорію
4

апроксимації та теорію інтерполяції. Остання відрізняється тим, що інтерполююча функція співпадає з початковою в заданій кількості точок.
2.Для ідентифікації статичних, але стохастичних об`єктів застосовуються методи математичної статистики. Цей підхід включає два напрямки - теорію оцінювання та теорію планування експериментів. Остання використовується для підвищення ефективності ідентифікації. А основною задачою теорії оцінювання являється оцінка параметрів об`єкта по пасивних спостереженнях в умовах випадкових завад.
3.Для ідентифікації динамічних об`єктів в режимі реальної експлуатації (при дії випадкових збурень і завад)
використовуються методи теорії систем автоматичного управління (методи автоматичного управління - МАУ).
Рис. 2. Структура підходів розв`язання задач ідентифікації.
2.2Об`єкт ідентифікації. Апріорна та апостеріорна інформації.
Взагальному випадку об`єкт ідентифікації представляється у вигляді багатополюсника, астина входів якого
5
неконтрольована E. Однак всі входи представляють собою дію зовнішнього середовища на об`єкт і являються певними визначеними функціями стану середовища і часу, тобто
У=Fo(X(t),E(t)) |
(2) |
Неконтрольований фактор Е(t) розглядається як випадкова завада, котра утруднює визначення оператора моделі
F.
Всі дані про об`єкт, які необхідні для проведення процедури ідентифікації, розділяються на два види: апріорні А=< α, β, χ, δ > і апостеріорні В=< X, Y> .
Апріорна інформація –це , якою необхідно володіти ще до спостережень входів і виходів об`єкта, характеризує загальну структуру об`єкта. Вона визначається чотирьома ознаками :
1.Ознака динамічності α. Якщо поведінка об`єкта залежить від його попередніх вхідних станівоб`єкт динамічний (α=1), в противному - статичний (α=0).
2.Ознака стохастичності β. Якщо вихідні параметри об`єкта залежать від неконтрольованих входів, або сам об`єкт містить неконтрольоване джерело - об`єкт стохастичний (β=1), в противному - детермінований (β=0).
3.Ознака нелінійності χ. Якщо реакція об`єкта на два довілні вхідні стани не еквівалентна сумі реакцій на кожний з цих станів - об`єкт нелінійний (χ=1), в противному - лінійний (χ=0).
4.Ознака дискретності δ. Якщо входи і виходи об`єкта зміюються або вимірюються в дискретні проміжки часу - об`єкт дискретний (δ=1), в противнму - неперервний (δ=0).
Апріорна інформація хоч і проясняє вигляд моделі, але не вказує на характер динамічності, нелінійності та стохастичності.
Апостеріорна інформація має не якісний, як апріорна, а кількісний характер, тобто містить результати спостережень входів X={x1, x2, ..., xn} і виходів Y={y1, y2 , ..., ym} об`єкта. Ця інформація достатньо повно характеризує об`єкт для його
6