

5. Розрахунок та моделювання системи автоматичного регулювання
В даному розділі дипломного проекту досліджується система автоматичного регулювання співвідношення витрат вугілля та повітря, що подаються на спалювання, з корекцією по вмісту кисню у димових газах. Об’єктом регулювання є паливно-повітряний тракт котла, вихідною величиною якого є концентрація кисню в димових газах, а регулюючою дією – зміна кута нахилу направляючих лопаток дуттьового вентилятора. Задане значення регульованої величини – 3.6 %О2.
Експериментальна крива розгону об’єкта регулювання, отримана при стрибкоподібній зміні кута нахилу направляючих лопаток дуттьового вентилятора на 20%.
|
Час, с |
Концентрація кисню, % |
|
0 |
3.60 |
|
2 |
3.60 |
|
8 |
3.61 |
|
35 |
3.85 |
|
45 |
3.92 |
|
55 |
3.99 |
|
75 |
4.07 |
|
95 |
4.18 |
|
112 |
4.23 |
|
172 |
4.29 |
|
202 |
4.32 |
|
262 |
4.33 |
|
292 |
4.35 |
|
322 |
4.37 |
Функція
передачі об’єкта каналом “
зміна кута нахилу направляючих лопаток
дуттьового вентилятора у %– витрата
повітря у %”
![]()
Збурення
в об’єкті здійснюється зміною кількості
обертів шнекового дозатора вугілля на
20 %. Функція передачі ОР каналом збурення
![]()
Зміна заданого значенння концентрації О2 0.15 %.
Вимоги до якості процесу регулювання
1. Максимальне динамічне відхилення А1 = 0.15 %
2. Точність регулювання = 0.05 %.
3. Час регулювання tp = 100с.
Ступінь коливальності m = 0.32.
Для розрахунку САР необхідно спочатку за експериментальною кривою розгону знайти модель ОР.
5.1. Знаходження динамічної моделі об’єкта регулювання
Для того щоб, розрахувати систему автоматичного регулювання, перш за все, потрібно математично описати об’єкт регулювання, тобто знайти рівняння, які дозволяють розраховувати зміни регульованої величини (вихідної величини об’єкта) в часі під дією різних вхідних величин об’єкта. Такі рівняння можуть бути у вигляді перехідних функцій, диференціальних рівнянь або функцій передачі. Система таких рівнянь є математичною моделлю об’єкта регулювання. Зручність представлення математичної моделі у вигляді функцій передачі полягає в тому, що дає можливість визначити структуру об’єкта регулювання, і одночасно вказати, з яких ланок складається об’єкт регулювання і як вони між собою з’єднані.
Знаходження математичної моделі об’єкта можна здійснити аналітичним або експериментальним методами.
В аналітичних методах процеси, що відбуваються в об’єкті, аналізуються на основі законів збереження маси і енергії, а також з врахуванням конструктивних, режимних та інших особливостей об’єкта.
При експериментальних методах немає необхідності детально знати процеси, що відбуваються в середині об’єкта під дією збурень. Об’єкт регулювання при цьому розглядають як “чорну скриньку”, внутрішня будова та властивості якої по суті невідомі. Потрібну інформацію про властивості об’єкта одержують, спостерігаючи процес зміни його вихідної (регульованої) величини при відомих змінах кожної вхідної величини. При знаходженні функції передачі об’єкта експериментальним методом важливо чітко з’ясувати, що входить в поняття “об’єкт регулювання”, тобто які фізичні величини вимірювалися в експерименті, які є вхідні і вихідні величини об’єкта.
Найчастіше зміну вхідної величини задають у вигляді однократної стрибкоподібної зміни, причому в момент збурення об’єкт повинен бути в стані рівноваги, і при цьому всі інші його вхідні величини мають залишатися сталими (метод кривої розгону). Деколи зміну вхідної величини здійснюють у вигляді короткочасного імпульсу (метод імпульсної перехідної характеристики) або ж у вигляді періодичних, по можливості синусних коливань (метод частотних характеристик). Можливе також застосування випадкових змін вхідної величини протягом деякого достатньо тривалого часу (статистичні методи).
Задача знаходження функції передачі об’єкта регулювання за експериментальними перехідними функціями на практиці вирішується неоднозначно. Це значить, що деякій експериментально одержаній перехідній функції об’єкта можна підпорядкувати декілька варіантів функцій передач з різними параметрами (отже, і декілька варіантів структури об’єкта), підібраних так, що перехідні функції для всіх варіантів приблизно збігаються з експериментальною. При апроксимації експериментально отриманих перехідних функцій рекомендується задавати як апроксимуючу залежність – перехідну функцію, що відповідає обраній функції передачі лінійного об’єкта. При цьому отримують лінеаризовану модель об’єкта регулювання для досліджуваного каналу. Найкращим вважається той варіант, в якому розходження між розрахованою і експериментальною перехідними функціями будуть мінімальними.
Задача знаходження математичної моделі об’єкта за його експериментальною (згладженою) перехідною функцією, як правило, розв’язуються в три етапи:
Виходячи з характеру експериментальної кривої і приймаючи до уваги відомі взаємозалежності між функціями передачі і перехідними функціями вибирають передбачувану структуру моделі об’єкта і відповідну до неї функцію передачі в загальному вигляді.
Знаходять числові значення параметрів моделі об’єкта за обраною методикою і отримують конкретну функцію передачі моделі.
Знаходять розрахункові значення перехідної функції обраної моделі і перевіряють точність апроксимації, порівнюючи теоретичну криву з експериментальною.
Для знаходження динамічної моделі об’єкта регулювання було застосовано експериментальну криву розгону по зміні концентрації кисню в часі. , що була одержана внаслідок стрибкоподібної зміни положення лопаток ДВ на 20%.
Програма для побудови експериментальної кривої розгону в середовищі Matlab
t=[0 2 8 35 45 55 75 95 112 172 202 262 292 322];
O2=[3.60 3.60 3.61 3.85 3.92 3.99 4.07 4.18 4.23 4.29 4.32 4.33 4.35 4.37];
plot(t,O2,'k*');grid;xlabel('t,c');
ylabel('CO2,%');title('Kruva rozgony OP');
Вигляд експериментальної кривої розгону показаний на рисунку 5.1
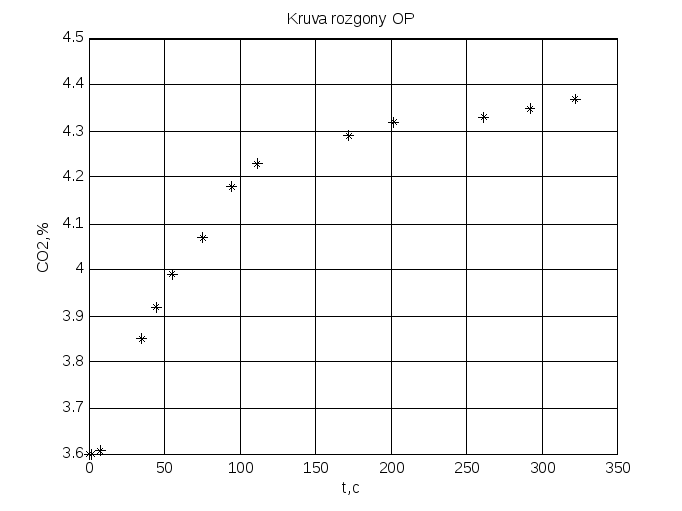
Рис. 5. 1. Експериментальна крива розгону паливо-повітряного тракту при зміні регулюючої дії на 20 %
Виберемо модель у вигляді послідовного з’єднання аперіодичних ланок і ланки запізнення. Функція передачі такого об’єкту має вигляд:
 ,
,
де T– стала
часу аперіодичної ланки, k – коефіцієнт
передачі,![]() - час запізнення,n–
кількість аперіодичних ланок.
- час запізнення,n–
кількість аперіодичних ланок.
З експериментальної
кривої розгону, зображеної на рисунку
5.1 знаходимо значення часу t1,
що відповідає значенню кривої розгону![]() (t1)=
(t1)=![]() 1
=0.632
1
=0.632![]() =0.49
=0.49
t1=80 с.
Час
запізнення
визначаю з експериментальної перехідної
функції, як час від моменту зміни вхідної
величини до моменту відхилення
регульованої величини не більше, як на
3 % від усталеного значення зміни
![]() вихідної
величини.
вихідної
величини.
=10 с.
Момент
часу
![]() визначають як половину від (
визначають як половину від (![]() ).
).
![]() .
.
![]() h2=(3.92-3.6)/0.77=0.4156
h2=(3.92-3.6)/0.77=0.4156
З
таблиці 5.1 знаходимо найближче до
знайденого
![]() розрахункове значення h2
і відповідне йому значення n
та Dn
розрахункове значення h2
і відповідне йому значення n
та Dn
Таблиця 5.1.
|
n |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
h2 |
0.3934 |
0.2994 |
0.2423 |
0.2024 |
0.1728 |
0.1497 |
0.1311 |
0.1160 |
0.1053 |
0.0926 |
|
Dn |
0.962 |
0.642 |
0.524 |
0.462 |
0.421 |
0.391 |
0.371 |
0.354 |
0.339 |
0.321 |
n =1; Dn=0,962.
За
формулою
![]() розраховуємо
сталу часу
Т1=65
с.
розраховуємо
сталу часу
Т1=65
с.
Коефіцієнт
передачі
![]()
де
![]() -
стрибкоподібна зміна вхідної величини.
-
стрибкоподібна зміна вхідної величини.
Функція передачі даного об’єкта регулювання буде мати такий вигляд:
![]() .
.
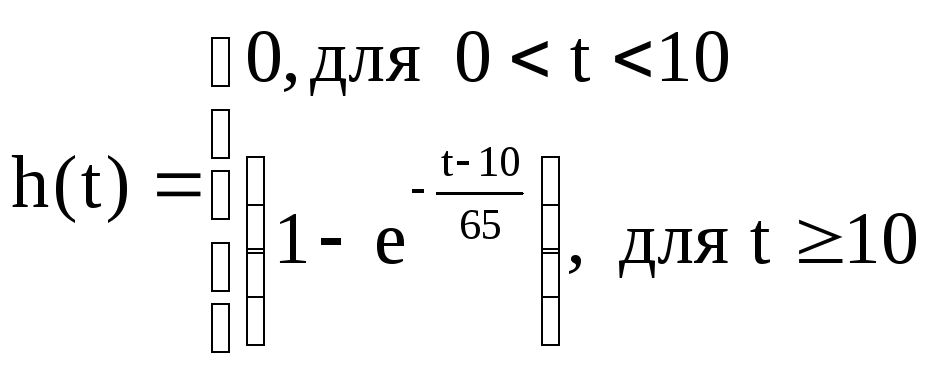
Перехідна функція для такої функції передачі матиме вигляд
Для
перевірки адекватності динамічної
моделі визначаємо зведену похибку,
порівнюючи безпосередньо значення
експериментальної кривої розгону
![]() з розрахунковими у задані моменти часу
з розрахунковими у задані моменти часу![]() :
:
![]()
Програма для побудови експериментальної та розрахункової кривих розгону та знаходження максимальної зведеної похибки в середовищі Matlab
clc
clear
t=[0 2 8 35 45 55 75 95 112 172 202 262 292 322];
O2=[3.60 3.60 3.61 3.85 3.92 3.99 4.07 4.18 4.23 4.29 4.32 4.33 4.35 4.37];
plot(t,O2,'k*');grid;xlabel('t,c');
ylabel('CO2,%');title('Kruva rozgony OP');
T1=65;dy=0.769;
tau=10;
k=dy/20;
h_x=(O2-3.6)/dy;
h=(1-exp((-t+tau)/T1)).^1;
h=[0 0 0 h(4:14)];
delta=abs(h-h_x)*100;
[max_poxubka j]=max(delta)
y=h*k*20+3.6;
figure(1);plot(t,h_x,'*',t,h,'r');grid;
plot(t,O2,'k*',t,y,'k' );grid;xlabel('t,c');
ylabel('CO2,%');title('Kruva rozgony OP');
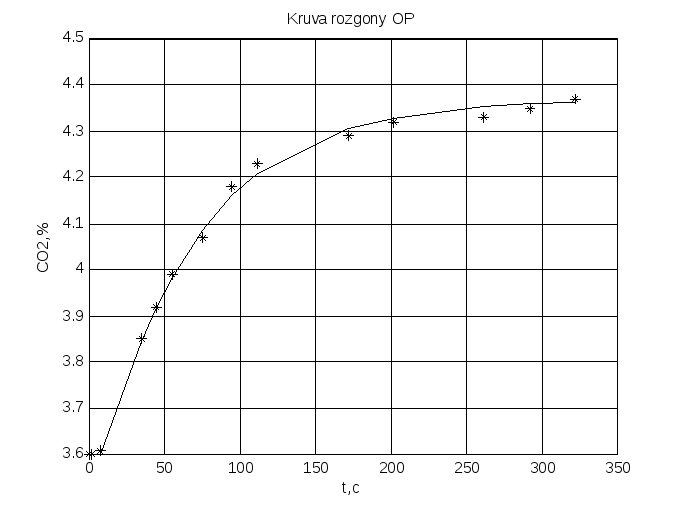
Рис. 5.2. Порівняння кривих розгону:„*” - експериментальна крива розгону;
„-” – знайдена аналітично.
Результати виконання програми:
max_poxubka = 3.0 % – максимальна зведена похибка.
Зведена похибка не перевищує 3%, отже знайдена модель адекватна заданій експериментальній кривій розгону.