

4. Лінеаризація математичної моделі.
Початковий стан рівноваги будемо розглядати як номінальний режим роботи об’єкту. Отже Р10=Р1Н, Р20=Р2Н, Q20=Q10=QH, h0=hH.Лінеаризуємо математичну модель відносно прийнятого номінального режиму.
Перепишемо систему ( 5 ) у формі (3.2):
 (9)
(9)
Тоді лінеаризована система буде мати вигляд:
 .(10)
.(10)
Або, позначивши значення часткових похідних через aij таbij, отримаємо
 (11)
(11)
Згідно із завданням, причиною відхилення
параметрів об’єкту від стану рівноваги
є зміна тиску Р1. Зміни інших
вхідних та керуючих величин відсутні
(![]() ),
тому система (11) матиме вигляд:
),
тому система (11) матиме вигляд:
 (12)
(12)
Коефіцієнти системи (12) визначаються за формулами:
![]()
![]()
![]()
![]() (13)
(13)
![]()
![]()
Щоб використати для дослідження лінійної моделі (12) матричні методи, на яких базуються функції STEP та IMPULSE, потрібно записати її в матричній формі:
 ,
(14)
,
(14)
або, застосувавши умовні позначення матриць,
![]() ,
,
де А=![]() - власна матриця системи,
- власна матриця системи,
X=![]() - вектор параметрів стану,
- вектор параметрів стану,
b=![]() - матриця вхідних величин.
- матриця вхідних величин.
Згідно із стандартною формою представлення лінійних систем, у випадку, коли рівень рідини в ємності є вихідною величини об’єкту, повною моделлю лінеаризованого об’єкту буде система рівнянь:
![]() ,
,
Y=C*X+D*U
де: С=[1 0], D=[0].
5. Дослідження реакції моделі на стрибкоподібне збурення.
5.1. Для нелінійної моделі .
Щоб знайти реакцію нелінійної моделі на стрибкоподібну зміну тиску Р2, розв’яжемо систему нелінійних диференційних рівнянь (9) за допомогою функції ODE23. Опишемо систему (9) у файліnelmod.m:
function y=nelmod (t,x);
h=x(1); Q1=x(2);
ro=1000; g=9.8; dz=0.9; kv=1e-5;
d=0.25; r1=0.09; L1=102; r2=0.07; L2=3;
p1=15000; p2=800;
% -------------------------------------------------
k2=(pi*r2^4)/(8*L2*kv);
k1=sqrt((4*pi^2*r1^5)/(L1*dz));
S=pi*d^2/4;
A=4*pi*r1^3/dz;
% -------------------------------
y=[ (Q1-k2*((ro*g*h-p2)/ro))/S;
(k1^2*(p1/ro)-Q1^2)/A ];
Графіки перехідних процесів h(t) та Q(t) отримаємо, підставивши в файл lab2fnelmod.mзначення тиску Р1=6 кПа та виконавши наступну послідовність команд:
clear;clc
format long;
x0=[0.022396368107232 0.006171779916569];
[t,y]=ode23('nelmod',[0 1],x0);
subplot(2,1,1);plot(t,y(:,1),'r');grid;xlabel('t,c');ylabel('H,m');
subplot(2,1,2);plot(t,y(:,2),'r');grid;xlabel('t,c');ylabel('Q_1,m^3/c');
Матриця ускладається з двох стовпців, перший з яких містить значення зміни рівня в часі h(t), а другий - залежності Q2(t).
Після виконання послідовності команд отримаємо графіки залежності h(t) та Q2(t) рис.2.

Рис.2. Графіки зміни рівня та зміни витрати рідини в нелінійній моделі.
5.2. Для лінійної моделі .
Реакцію лінійної моделі на одиничнийстрибкоподібний вхідний сигнал можна
визначити за допомогою функції STEP. Для
знаходження реакції на стрибкоподібне
відхилення вхідної величини від
номінального значення
![]() ,
перехідну функцію системи, одержану з
допомогою функції STEP, потрібно помножити
на
,
перехідну функцію системи, одержану з
допомогою функції STEP, потрібно помножити
на
![]() .
.
Послідовність команд для знаходження
значень матриці стану А
та вектора вхідних величинb,
які є вхідними аргументами для
функції STEP, та для побудови графіків
перехідних процесів
![]() та
та
![]() ,записана
у файліgrafrez.m:
,записана
у файліgrafrez.m:
% Розв'язування лінійної системи
p10=15000; p20=200;
ro=1000; g=9.8;
dz=0.9; d=0.25;
r1=0.09; r2=0.07;
L1=102; L2=3;
kv=1e-5;
k2=(pi*r2^4)/(8*L2*kv);
k1=sqrt((4*pi^2*r1^5)/(L1*dz));
Q1=sqrt(k1^2*p10/ro);
S=pi*d^2/4;
A=4*pi*r1^3/dz;
a11=(1/S)*(-k2*g); a12=1/S;
b11=(1/S)*k2*(1/ro);
a21=0;
a22=1/A*(-2*Q1);
a=[a11 a12; a21 a22]
b=[b11; 0]
% побудова графіків перехідних процесів лінійної моделі
P2=800; P20=200;
Px=P2-P20;
c=[1 0]; d=[0];
t=[0:0.01:1];
x0=[0.022396368107232 0.006171779916569];
[y,x]=step(a,b,c,d,1,t);
x=Px*x;
subplot(2,1,1);plot(t,x0(1)+x(:,1),'r');grid;xlabel('t,c');ylabel('H,m'); subplot(2,1,2);plot(t,x0(2)+x(:,2),'r');grid;xlabel('t,c');ylabel('Q_1,m^3/c');
В результаті виконання послідовності операторів файлу grafrez.mотримаємо:
a=-62.746 20.371
0 -1.212
b=1.0e-006*0.9541
0
Та графіки залежності
![]() та
та
![]() рис.3.
рис.3.
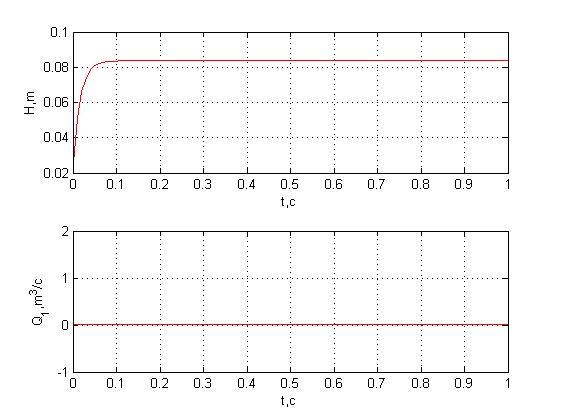
Рис.3. Графіки
залежності
![]() та
та
![]() в лінійній моделі
в лінійній моделі