

I коэффициент интегрирующего звена
Коэффициенты регулятора могут быть изменены "на лету" (динамически) путем подачи их значений на соответствующие входы блока ПИД-регулирования от других функциональных блоков стратегии. Адаптивное регулирования будет выполняться только в том случае, когда присоединен и активен вход блока Активизация адаптивного регулирования.
Поле Активизация адаптивного регулирования
При использовании динамически изменяемых коэффициентов регулятора на вход Активизация адаптивного регулирования следует подать сигнал высокого уровня от другого функционального блока стратегии. Иными словами, для реализации адаптивного регулирования следует подключить входы P, D, I и Активизация адаптивного регулирования к выходам других функциональных блоков стратегии. При этом статические коэффициенты регулятора, заданные в соответствующих полях диалоговой панели, использоваться не будут.
Группа параметров Ограничение выходного сигнала
Для предотвращения выхода управляющего воздействия за пределы аппаратной шкалы канала устройства, формирующего сигнал управления, а также для простейшей фильтрации всплесков управляющего воздействия в ПИД-регулятор введен ограничитель по уровню и по скорости изменения.
Поле Верхний предел
Определяет верхнее граничное значение выходного сигнала блока ПИД-регулирования.
Поле Нижний предел
Определяет нижнее граничное значение выходного сигнала блока ПИД-регулирования.
Поле Ограничение по скорости
Определяет максимально допустимую скорость нарастания выходного сигнала ПИД-регулятора, измеряемую в единицах в минуту. При чрезмерно большом изменении значения сигнала обратной связи или динамической уставки, указанный параметр позволяет предотвратить формирование управляющего воздействия со скоростью, превышающей допустимую для устройства (ЦАП). В подобных случаях скорость изменения сигнала на выходе ПИД-регулятора будет равна заданной в поле Скорость ограничения.
Поле Постоянная фильтра
Данное поле может содержать коэффициент фильтрации шумов, которые могут присутствовать во входном сигнале обратной связи ПИД-регулятора. При нулевом значении в данном поле фильтрация отсутствует. При максимальном значении, равном 1,0, эффект фильтрации становится наиболее выраженным.
Поле Уставка
Данное поле предназначено для ввода значения, которое должен иметь стабилизируемый параметр при правильном регулировании.
Поле Динамическая уставка
Если на данный вход блока ПИД-регулирования подается сигнал от другого функционального блока, то уставка ПИД-регулятора будет динамически изменяться в процессе исполнения стратегии. При активизации адаптивного регулирования статические параметры регулятора будут блокированы и исключены из алгоритма управления.
Входная связь: Блок ПИД-регулирования имеет шесть входов: Обратная связь, Уставка, Коэффициент P, Коэффициент I, Коэффициент D и Активизация адаптивного регулирования.
Выходная связь: Выходной сигнал, который является управляющим воздействием.
2.19 Блок формирования пилообразного сигнала
Данный блок предназначен для формирования сигнала пилообразной формы и имеет входы и выход. Выходной сигнал блока может быть сброшен в начальное значение путем подачи дискретного сигнала высокого уровня на вход сброса от другого функционального блока стратегии. Выходной сигнал блока может быть временно зафиксирован на текущем значении путем подачи дискретного сигнала высокого уровня на вход Останов от другого функционального блока стратегии. Частота обновления значений на выходе блока формирования пилообразного сигнала пропорциональна частоте сканирования задачи, содержащей блок.
Поле Начальное значение
Данное поле определяет начальное значение пилообразного сигнала на выходе блока.
Поле Максимальное значение
Данное поле определяет конечное значение пилообразного сигнала на выходе блока. Может быть больше либо меньше начального значения.
Поле Шаг увеличения/уменьшения
Данное поле должно содержать величину, на которую будет изменяться значение на выходе блока при каждом сканировании задачи, содержащей указанный блок.
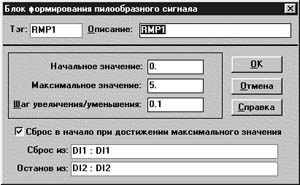
Поле Сброс из
Выходной сигнал блока может быть сброшен в начальное значение путем подачи на данный вход дискретного сигнала высокого уровня от другого функционального блока стратегии. Подача сигнала низкого уровня обеспечивает возобновление функционирования блока. Если данный вход не присоединен, его состояние принимается равным логическому нулю.
Поле Останов из
Выходной сигнал блока может быть зафиксирован с сохранением текущего значения путем подачи на данный вход дискретного сигнала высокого уровня от другого функционального блока стратегии. Подача сигнала низкого уровня обеспечивает возобновление функционирования блока. Если данный вход не присоединен, его состояние принимается равным логическому нулю.
Входная связь: Блок формирования пилообразного сигнала имеет два входа: Сброс и Останов.
Выходная связь: На выходе блока формируется аналоговый сигнал пилообразной формы, который может быть передан другим функциональным блокам стратегии.