

Завдань / Контрольні роботи (Скидан) / Методичні матеріали / Контроллеры Omron
.doc
В.Е. ОДОБРЯЕВ, Н.И. ТАТАРИНЦЕВ
(000 "НПФ Ракурс")
Применение программируемых контроллеров Omron в управлении непрерывными ТП
Рассматривается новый ПЛК сер. CS 1 фирмы Omron, его особенности и преимущества по сравнению с другими контроллерами этого класса.
A new PLC of CS1 family produced by Omron is considered; its features and advantages are compared with other controllers of this type.

П рограммируемые
логические контроллеры корпорации
Omron (Япония)
делятся на четыре класса:
Micro (микро).
Small (малые),
Medium
(средние) и
Large (большие).
Широкое применение в САУ непрерывными
ТП получили ПЛК классов
Medium и
Large.
Сбалансированная совокупность
основных характеристик и функциональных
возможностей ПЛК этих классов определило
их преимущественное использование в
САУ наиболее ответственными объектами.
К их числу относятся бортовые
установки космических агрегатов,
СУ процессами ядерных технологий,
объекты военно-промышленного
комплекса и теплоэнергетики. Новой
разработкой в этом классе изделий
являются
ПЛК сер.
Sysmac CS1
(рис.
1).
рограммируемые
логические контроллеры корпорации
Omron (Япония)
делятся на четыре класса:
Micro (микро).
Small (малые),
Medium
(средние) и
Large (большие).
Широкое применение в САУ непрерывными
ТП получили ПЛК классов
Medium и
Large.
Сбалансированная совокупность
основных характеристик и функциональных
возможностей ПЛК этих классов определило
их преимущественное использование в
САУ наиболее ответственными объектами.
К их числу относятся бортовые
установки космических агрегатов,
СУ процессами ядерных технологий,
объекты военно-промышленного
комплекса и теплоэнергетики. Новой
разработкой в этом классе изделий
являются
ПЛК сер.
Sysmac CS1
(рис.
1).
Контроллеры сер. CS1 по функциональным возможностям и техническим характеристикам существенно превосходят ранние модели PLC фирмы Omron, а также изделия известных мировых фирм, находящихся в классе Medium. Приведем некоторые (общепринятые для ПЛК) параметры контроллеров сер. PLC CS1:
Быстродействие (время исполнения
инструкции LD), мс ................................................................0,04
Число инструкций
................................................................![]() 400
400
Число точек ввода/вывода ...............................................…..5120
Емкость памяти программ, Кшагов ........................................250
Емкость энергонезависимой памяти
данных (DM), Кслов .................................................................448
Емкость карты Flash-памяти, MB .............................................48
Номенклатура поддерживаемых модулей
(ввода/вывода, специальных,
коммуникационных), типов ..................................................2100
сети и интерфейсы: Ethernet (FTP, TCP/IP.UDP/IP), Controller Link, PC Link, DeviceNet (CompoBus/D), CompoBus/S, ProfiBus/DP, Host Link, NT Link, Protocol Macros, Peripheral Bus.
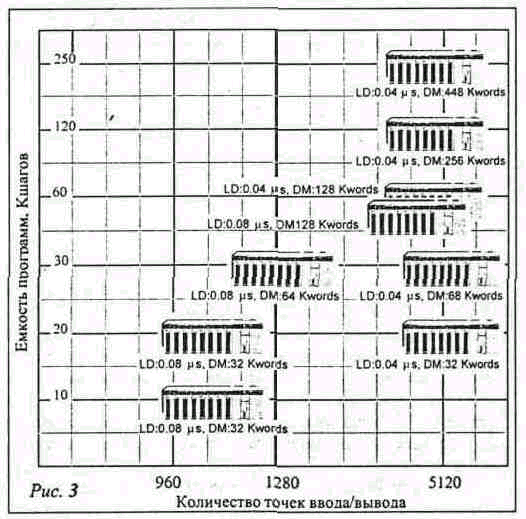
В настоящее время выпускается девять моделей модулей центрального процессора ПЛК сер. CS1. Между собой модули CPU (рис. 2) отличаются количеством бит I/O (минимально 960 бит I/O для CS1G-CPU42; максимально 5120 бит I/O для CS1H-CPU67), емкостью программ (минимально 10 Кшагов для CS1G-CPU42; максимально 250 Кшагов для CS1H-CPU67), размером памяти данных (минимально 32 Кслов для CS1G-CPU42; максимально 448 Кслов для CS1H-CPU67), наличием или отсутствием ЕМ- памяти. Широкая сетка (рис.3) взаимных сочетаний названных параметров позволяет оптимально выбирать модули CPU для конкретного ТП.
В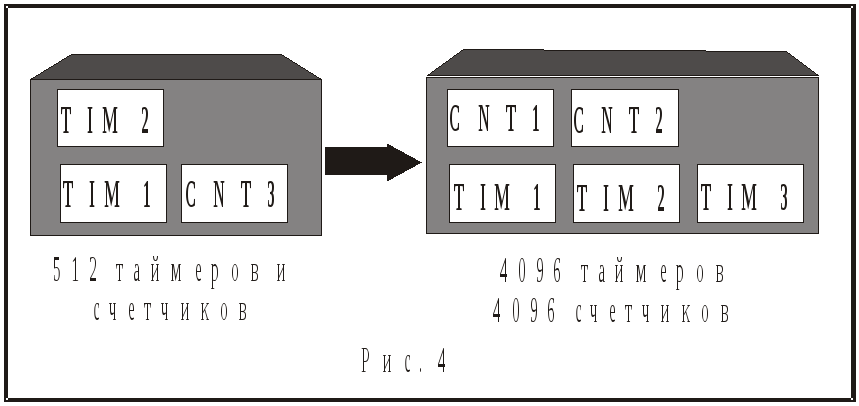 се
типы модулей CPU
снабжены коннектором для установки
карты
Flash-памяти,
периферийным портом и портом RS-232C,
а также имеют отсек для установки
дополнительных коммуникационных плат.
се
типы модулей CPU
снабжены коннектором для установки
карты
Flash-памяти,
периферийным портом и портом RS-232C,
а также имеют отсек для установки
дополнительных коммуникационных плат.
Качественно изменились некоторые ранее существующие инструкции процессора и добавились новые, упрощающие программирование сложных алгоритмов. В частности такие инструкции как таймеры и счетчики ранее принадлежали одной области памяти (не могли иметь одинаковые номера в одной программе) и их общее число для контроллеров, как правило, не превышало 512. В программах контроллеров CS1 можно одновременно использовать таймеры и счетчики с одинаковыми номерами (рис. 4). Тех и других может быть по 4096. Появились новые инструкции, позволяющие обрабатывать файловую память, текстовые строки, индексные регистры и многие другие. Используя их, модуль CPU может манипулировать своей собственной памятью. Так, например, из программы лестничных диаграмм можно осуществлять весь набор операций над файлами, расположенными на карте памяти (удалять, копировать, создавать директорию и изменять ее имя). Программу пользователя, находящуюся в CPU модуле, можно заменить программой из карты памяти, не выключая контроллер и без применения средств программирования. Программу пользователя и областей данных можно автоматически сохранить на карте памяти при включении питания ("легкое сохранение"). При обнаружении неисправности все данные, расположенные в модуле CPU, будут сохранены мгновенно. Это особенно важно для СУ с повышенными требованиями к надежности.
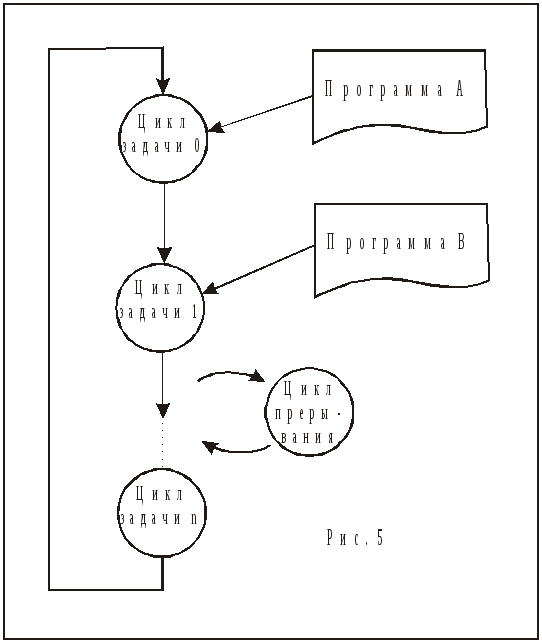
В качестве базовой концепции предложено структурное многозадачное программирование (Task Programming). Программа в ПЛК сер. CS1 разделена на задачи (циклические задачи), которые выполняются в установленном порядке (рис.5). Программы прерывания тоже введены как задачи (задачи прерывания). Контроллеры CS1-серии поддерживают до 32 циклических задач, 32 задачи прерывания I/O, две задачи запланированных прерываний, одну задачу прерывания
при отключении питания и 256 задач внешних прерываний. Программы задач создаются в виде модулей с отдельными функциями и целью. В дальнейшем эти модули могут использоваться при написании программ для аналогичных по функциональному назначению систем (рис. 6).
В ведение
структурного программирования
преследует следующие цели:
ведение
структурного программирования
преследует следующие цели:
-
стандартизации программ, как модулей;
-
разработки программ несколькими программистами, работающими параллельно;
-
создания программы, более легкой для понимания;
-
создания программ по шагам;
-
использования Basic-подобных мнемонических инструкций для написания программы, что трудно сделать при лестничном программировании (таких как условные переходы и циклы).
Появление новых инструкций позволяет упростить и саму процедуру программирования. В частности имеется возможность:
-
создавать циклически повторяющиеся программные секции;
-
осуществлять косвенную адресацию слов;
-
использовать индексные регистры как указатели косвенных адресов в адресном пространстве данных (индексные регистры очень удобны в комбинации с циклами, инкрементными инструкциями и инструкциями обработки табличных данных, поддерживаются авто-инкремент, авто-декремент, а также функции ветвления.) и т.п.
Несмотря на наличие мощных функциональных возможностей ПЛК, задача разработки и программирования ряда систем с непрерывными процессами по-прежнему остается весьма сложной. Особенно это касается СУ объектами с взаимосвязанными контурами регулирования (например, объекты теплоэнергетики, нефтяной, химической, газовой промышленности, металлургии). Для облегчения и эффективного решения этих задач фирмой Omron разработан специальный модуль управления контурами регулирования LCU (Loop Control Unit) и соответствующее к нему ПО CX-Process Tool и CX-Process Monitor. Программный пакет
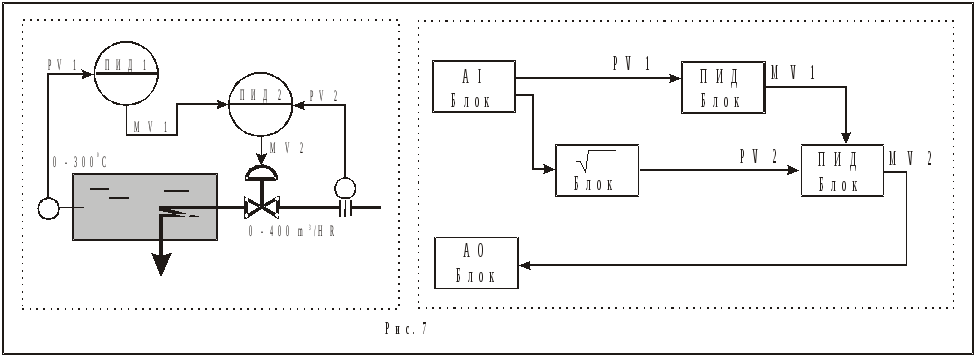
C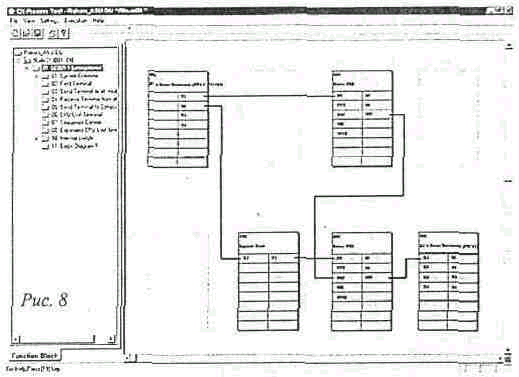 X-Process
Tool служит
для комбинирования функциональных
блоков и установления программных
связей между ними,
a CX-Process Monitor -
для мониторинга системы. Указанные
средства позволяют достаточно легко
"пройти" путь от функциональной
схемы до мониторинга спроектированной
системы. На рис.
7 показана
простейшая схема каскадного управления
и структура используемых блоков.
Для ее реализации потребуются модули
ввода/вывода аналоговых сигналов (два
ввода, один вывод) и модуль
LCU.
X-Process
Tool служит
для комбинирования функциональных
блоков и установления программных
связей между ними,
a CX-Process Monitor -
для мониторинга системы. Указанные
средства позволяют достаточно легко
"пройти" путь от функциональной
схемы до мониторинга спроектированной
системы. На рис.
7 показана
простейшая схема каскадного управления
и структура используемых блоков.
Для ее реализации потребуются модули
ввода/вывода аналоговых сигналов (два
ввода, один вывод) и модуль
LCU.
Связь аналоговыми сигналами между блоками определяется программно, в среде CX-Process Tool (рис. 8).
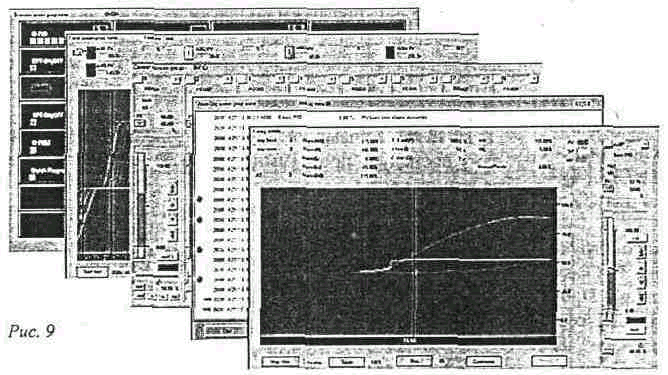
Для мониторинга СУ достаточно по последовательному каналу соединить ПЛК с компьютером, на котором установлен программный пакет CX-Process Monitor (рис. 9).
ПТК построен на базе контроллера управления ТП, представляющего собой ПЛК со специальным модулем управления контурами регулирования (LCU) и необходимым набором модулей аналогового и дискретного ввода/вывода (I/O).
Основные преимущества систем управления, выполненных на базе PLC+LCU:
• стоимость значительно ниже по сравнению с традиционными системами DCS;
• занимает в 4...5 раз меньше площади;
• не требует создания специальных климатических условий, может быть установлен непосредственно в машинном зале.
Имея аналогичные средства для разработки ПО и выполняя те же функции, СУ непрерывными ТП на базе PLC+LCU становится достойной альтернативой традиционным системам DCS.