

2.17 Блок двухпозиционного регулирования
Данный блок предназначен для реализации простейшего алгоритма двухпозиционного управления и имеет вход, на который подается сигнал обратной связи от объекта управления, и дискретный выход, логическое состояние которого зависит от текущего значения на входе, заданной уставки и значений порогов включения и выключения.
Теория:
Алгоритм непропорционального (двухпозиционного) регулирования состоит в том, что управляемый объект переводится регулятором в одно из двух состояний (включен или выключен) в зависимости от соотношения между измеряемым значением сигнала обратной связи, уставкой и порогами включения/выключения.

где:
Out выходной сигнал регулятора;
In входной сигнал регулятора;
S уставка;
H порог включения;
L порог выключения.
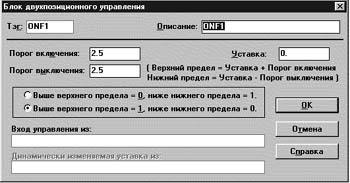
Поле Уставка
Данное поле должно содержать значение, с которым сравнивается сигнал обратной связи на входе блока. Уставка может быть фиксированной или динамически изменяемой сигналом от другого функционального блока стратегии.
Поле Порог выключения
Данное поле должно содержать значение, которое определяет зону нечувствительности регулятора при формировании выходного сигнала, выключающего объект управления. Нижний предел регулирования определяется путем вычитания порога выключения из значения уставки.
Поле Порог включения
Данное поле должно содержать значение, которое определяет зону нечувствительности регулятора при формировании выходного сигнала, включающего объект управления. Верхний предел регулирования определяется путем суммирования порога выключения и значения уставки.
Кроме того, логические состояния выходного сигнала регулятора могут быть установлены в требуемом порядке путем установки в соответствующее положение переключателя Выше верхнего предела... диалоговой панели настройки параметров блока.
Входная связь: Блок двухпозиционного управления имеет два входа: Вход обратной связи и Уставка.
Выходная связь: Блок имеет один дискретный выход, логическое состояние которого может быть передано другим функциональным блокам или элементам отображения стратегии.
2.18 Блок пид-регулирования
Данный блок имеет входы и выход управления. Один из входов предназначен для ввода измеряемого значения сигнала обратной связи от объекта управления. Кроме того, по одному из входов может вводиться динамически изменяемое значение уставки (значение стабилизации). Выход блока предназначен для выдачи сигнала регулирования, связываемого с аналоговым выходом физического устройства, который непосредственно осуществляет управление объектом.
Теория:
ПИД-регулятор предназначен для стабилизации заданного параметра в контуре автоматического управления с пропорционально-интегрально-дифференциальным законом регулирования. При этом стабилизируемый параметр контролируется датчиком, выходной сигнал которого подается на вход обратной связи блока, а стабилизация указанного параметра вблизи предварительно заданного или динамически изменяемого значения выполняется выходным сигналом регулятора с использованием ряда его дополнительных параметров.
ПИД является одним из наиболее широко распространенных законов регулирования. Он позволяет подстраивать управляющее воздействие в соответствии с заданными постоянными времени в зависимости от динамики управляемого процесса. Указанная возможность обеспечивает столь широкое признание, которое получил пропорционально-интегрально-дифференциальный закон регулирования. Регулирование осуществляется путем минимизации значения рассогласования (ошибки), получаемого путем вычитания сигнала обратной связи из уставки (значения стабилизации). ПИД-регулятор является одним из наиболее эффективных типов регуляторов.
Функции управления в ПИД-регуляторе могут быть разделены в соответствии с требованиями к системе. Имеются следующие режимы управления: режим 1, режим 2 и режим 3.
Управление в режиме 1 (пропорциональное регулирование)
В режиме 1 выполняется простейшее пропорциональное регулирование. При этом управляющее воздействие формируется в виде разности между значением стабилизации и измеренным значением сигнала обратной связи, умноженной на коэффициент пропорциональности (P). Большему значению коэффициента пропорциональности соответствует более высокая скорость реакции регулятора. Иными словами, регулятор быстрее отрабатывает разность между уставкой и значением сигнала обратной связи. Пропорциональный регулятор может быть получен путем установки нулевых значений в полях Коэффициент I (коэффициент интегрирующего звена регулятора) и Коэффициент D (коэффициент дифференцирующего звена регулятора) диалоговой панели настройки параметров блока ПИД-регулирования.
Управление в режиме 2 (пропорционально-интегральное регулирование)
Данный алгоритм регулирования позволяет снизить погрешность регулятора за счет того, что рассогласование между регулируемым параметром и уставкой (значением стабилизации) поступает на вход интегрирующего звена регулятора и после интегрирования суммируется со значением на выходе пропорционального звена. Пропорционально-интегральный регулятор может быть получен путем установки нулевого значения в поле Коэффициент D (коэффициент дифференцирующего звена регулятора) диалоговой панели настройки параметров блока ПИД-регулирования.
Управление в режиме 3 (пропорционально - интегрально - дифференциальное регулирование)

Данный алгоритм регулирования позволяет учитывать динамику изменения регулируемого параметра путем вычисления значения и знака его производной с последующим вычитанием из значения сигнала на выходе пропорционально-интегрального звена регулятора, что обеспечивает возможность достижения минимума ошибки на выходе ПИД-регулятора за наиболее короткий интервал времени.
Переключатель Тип ПИД-регулирования
На выходе блока при регулировании по положению формируется абсолютное значение управляющего воздействия, необходимое для стабилизации параметра. При регулировании по скорости на выходе блока формируется относительное приращение, стабилизирующее целевой параметр объекта управления. Например, если текущее значение стабилизируемого параметра на входе обратной связи блока равно 5, а значение управляющего воздействия на выходе ПИД-регулятора, осуществляющего регулирование по положению, равно 2, то далее стабилизируемый параметр должен стать равным 2.
Если текущее значение стабилизируемого параметра на входе обратной связи блока равно 5, а значение управляющего воздействия на выходе ПИД-регулятора, осуществляющего регулирование по скорости, равно 2, то далее стабилизируемый параметр должен стать равным 5+2=7.
P коэффициент пропорционального звена
D коэффициент дифференцирующего звена