

Otvety_na_GOS_SMiVVP_vip
.pdfу берегов Австралии - вилли-вилли.
Продолжительность существования ТЦ от 3 до 20 суток.
Тропические циклоны, зарождающиеся в тропической зоне Мирового океана, представляют реальную угрозу безопасности мореплавания даже для современных транспортных судов, имеющих неограниченный район плавания. Ураганные ветры, сильное волнение моря, ливневые осадки и грозы сопровождают тропический циклон на всем пути его перемещения. Особенно опасной для морских судов является центральная область тропического циклона — около 50 миль от его центра.
Всем судам независимо от класса и назначения рекомендуется уклоняться от встречи с тропическими циклонами и следовать по их перифериям на расстоянии не менее 500 миль от центров ураганов.
Обязанности штурмана при плавании в зонах действия тропических циклонов. Основным источником информации о тропических циклонах являются штормовые предупреждения, передаваемые соответствующими гидрометеорологическими центрами.
Получив предупреждение о тропическом циклоне, вахтенный штурман обязан нанести на прокладочную карту его центр и проставить время. От этой точки пунктирной стрелкой в направлении, указанном в предупреждении, нанести предполагаемое местоположение урагана на ближайшие 12 ч. Над стрелкой указываются направление и скорость движения тропического циклона по прогнозу. Аналогичным образом наносят на карту и сведения о фактическом местоположении урагана. Фактическая траектория его движения наносится сплошной линией.
Приближение тропического циклона можно своевременно обнаружить по следующим признакам:
по барической тенденции — давление падает более чем на 3 гПа в сутки или характер его изменения не соответствует суточному ходу давления в тропиках;
по появлению волн крупной зыби. При небольшой скорости (5—10 уз) движения тропического циклона волны зыби могут наблюдаться за один-два дня до его прихода. Если направление распространения волн зыби не меняется, то тропический циклон смещается непосредственно на район местоположения судна. При изменении направления распространения волн зыби против часовой стрелки центр тропического циклона пройдет справа налево, если по часовой стрелке, то наоборот — слева направо;
по появлению перистых облаков, вытянутых радиально расходящимися полосами. Они не исчезают после захода и восхода Солнца и бывают эффектно окрашены.
Если направление облачных полос остается неизменным с течением времени и суточный ход атмосферного давления нарушен, то тропический циклон движется на местоположение судна. Если точка сходимости полос перистых облаков перемещается и атмосферное давление незначительно падает, согласуясь с суточным ходом, то тропический циклон пройдет мимо;
по установлению очень знойной и душной погоды с безоблачным небом и повышенной видимостью; по зонам мощной облачности, гроз и ливней на экранах судовых радиолокационных станций, которые
обнаруживают эти явления на расстоянии 200—250 миль.
При нахождении в зоне тропического циклона следует располагать судно с механическим двигателем так, чтобы ветер был с борта, притом в северном полушарии с правого, в южном—с левого. Это правило применимо для обеих сторон циклона.
54. Составление грузового плана
Распределение грузов на судне.
В случае перевозки тяжелых грузов (руды) необходимо принять во внимание прочность палуб. Пароходство должно предписать нормы загрузки отдельных помещений судна.
Грузы на судне должны располагаться по весу, пропорционально объѐму отдельных грузовых помещений. В этом случае прочность судна будет сохранена. Количество груза, предназначенного для погрузки в какоелибо из судовых помещений, может быть определено формулой:
p = ωP / W
где р — искомый вес груза; ω — объем грузового помещения
W—грузовместимость судна (соответственно в кипах или зерне); Р — вес всех грузов, принимаемых судном.
Практически продольная прочность вполне обеспечивается, если весовое количество груза будет отличаться от результата, полученного по приведенной формуле в пределах 10—12%.
Загружая палубу любого судна, следует иметь в виду, что еѐ прочность в концевых частях судна больше, чем в его середине. Точно так же у бортов и переборок палуба имеет большую прочность, чем посередине, если, конечно, палуба не подкреплена пиллерсами.
Грузовой план и расчет полной загрузки судна.
Правильно составленный грузовой план должен обеспечить: а) мореходность судна; б) сохранность грузов;
в) возможность принимать и выдавать груз по коносаментам (попартионно); г) одновременную обработку трюмов, характеризуемую коэффициентом неравномерности трюмов,
Km = W / (n Wmax);
где Km — коэффициент, показывающий отношение грузовместимости судна W к грузовместимости наибольшего трюма Wmax, умноженного на количество трюмов;
n - количество трюмов.
Если в трюмах находится разный груз, то более точным будет коэффициент, показывающий отношение общего количества люко-часов, которые необходимо отработать по всему судну, к количеству люко-часов по наибольшему трюму, умноженному на число трюмов.
Kл = Л / (n Лmax);
д) обеспечение скоростной обработки судов в портах; е) полное использование грузоподъемности и грузовместимости, т. е. полную загрузку судна
Порядок составления грузового плана.
1.Проверить, нет ли грузов, опасных для судна и пассажиров.
2.Определить возможность размещения грузов с точки зрения их совместимости и равномерного распределения по трюмам, составить ведомость, из которой должно быть видно, что а) несовместимые грузы удалось распределить в разные грузовые помещения;
б) использование кубатуры трюмов и распределение весовых нагрузок по отдельным отсекам не вызовут вредных напряжений в корпусе судна.
3.Для проверки влияния загрузки на ход грузовых работ подразделить грузы согласно классификации, принятой в положении о судо-суточных нормах грузовых работ в портах, и определить коэффициент неравномерности распределения груза по трюмам.
4.Имея схему размещения груза по трюмам, составить грузовой план (рис. 1).
5.Проверить поперечную остойчивость.
Виды грузовых планов.
Одноплоскостной чертѐж грузового плана составляется всегда.
В случае наличия большого количества мелких партий груза необходимо составить грузовой план, имеющий несколько плоскостей. В таком плане даѐтся дополнительный разрез по твиндеку, верхней палубе и т.д.
Координаты груза внутри судна можно определить из чертежа судна сечениями по ватерлиниям (примерно через метр), по шпангоутам (по шпациям), а также по батоксам (примерно через метр). В этом случае каждая партия груза может быть точно обозначена номером ватерлинии, батокса и шпангоута (система Голубева).
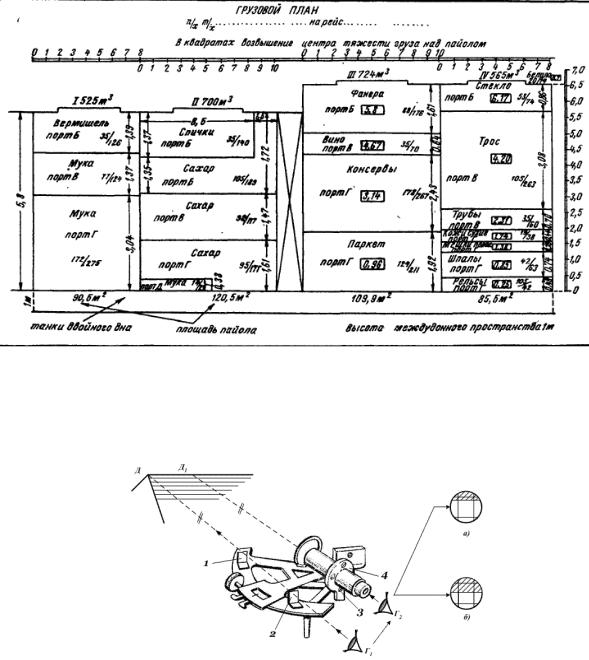
Рис. 1. Расчѐтные данные одно-плоского грузового плана.
55. Выверка секстана
1. Проверка параллельности оптической оси зрительной трубы плоскости азимутального лимба
Рис. 1. Проверка параллельности оси зрительной трубы плоскости азимутального лимба
Эта выверка выполняется еще до выхода в море во время приготовления к плаванию.
Секстан с установленной зрительной трубой ставят на горизонтальное основание (рис. 9.8). Отстопорив алидаду, устанавливают ее в среднее положение (отсчет по лимбу ≈ 50°÷70°). На края лимба ставят два диоптра (1, 2) таким образом, чтобы соединяющая их линия была примерно параллельна оптической оси зрительной трубы.
Найдя удаленный (не ближе 50 м) предмет с ярко выраженной горизонтальной поверхностью (крыша здания, линия горизонта), устанавливают секстан так, чтобы эта горизонтальная поверхность оказалась на продолжении линии, проходящей через верхние срезы диоптров (Г1Д), затем наблюдают предмет через зрительную трубу (Г2Д1).
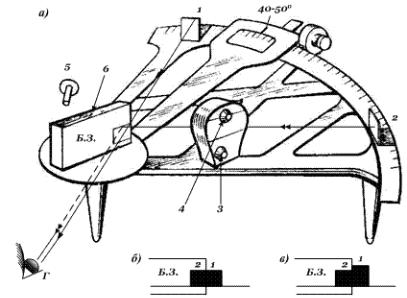
Изображение выбранной горизонтальной поверхности должно оказаться в центре зрительной трубы (рис.
9.8б).
Если изображение выбранной горизонтальной поверхности смещено относительно центра зрительной трубы (рис. 9.8а), необходимо с помощью отвертки, вращая верхний и нижний регулировочные винты (4, 3) в кольце стойки зрительной трубы (поджимая один винт и отдавая другой) до тех пор, пока изображение горизонтальной поверхности не окажется в центре зрительной трубы (рис. 9.8б). В этом случае оптическая ось зрительной трубы будет параллельна плоскости азимутального лимба.
2. Проверка перпендикулярности большого зеркала плоскости азимутального лимба
Рис. 2. Проверка перпендикулярности большого зеркала плоскости азимутального лимба
Эта выверка выполняется перед каждыми наблюдениями. Для ее выполнения необходимо (рис. 9.9):
•установить секстан на ножки на горизонтальное основание (без зрительной трубы);
•отстопорив алидаду, установить ее на отсчет ≈ 40°÷50°;
•на азимутальный лимб секстана у отсчетов ~ 0° и ~ 120° установить диоптры (1, 2);
•посмотреть на секстан со стороны большого зеркала (Б.З.) таким образом, чтобы:
• |
луч зрения проходил через правый срез большого зеркала и был параллелен плоскости |
рамы; |
|
• |
правый срез большого зеркала «скрывал» левую половину левого (1) диоптра (наблюдается |
прямовидимо только правая половина левого диоптра);
• перемещая правый диоптр (2) по азимутальному лимбу, добиться такого его положения, чтобы на правом срезе большого зеркала наблюдалась и половина отраженного изображения правого диоптра (половина левого диоптра находится все это время в поле зрения). Если наблюдаемые верхние срезы диоптров будут на одном уровне (рис. 9.9б) → большое зеркало перпендикулярно плоскости азимутального лимба.
Если наблюдаемые верхние срезы диоптров не совпадают (рис. 9.9в) → вращением регулировочного винта
(5) большого зеркала (6), совместить края диоптров так, как показано на рис. 9.9б).
Примечание:

Регулировочный ключ (5) «вставляется» в специальное гнездо 14 (рис. 9.7) с тыльной стороны большого зеркала.
3. Проверка перпендикулярности малого зеркала плоскости азимутального лимба
Проверка перпендикулярности малого зеркала плоскости азимутального лимба также производится перед каждыми наблюдениями. Эта последняя (третья) выверка секстана выполняется или по Солнцу или по звезде. Для выполнения ее по Солнцу необходимо:
•Навести зрительную трубу на резкость, и установить ее на штатное место в специальное гнездо секстана.
•Алидаду и угломерный барабан установить точно на отсчет «0°00,0′» (рис. 9.10).
•Подобрать и установить перед большим зеркалом и за малым зеркалом темные светофильтры.
Рис. 3. ОС = 0°00,0′
•Навести зрительную трубу на Солнце – в поле зрения наблюдаем (рис. 9.11)
•В первом случае (рис. 9.11а), при вращении угломерного барабана одно изображение светила строго проходит через его другое изображение и, в какой-то момент, эти изображения накладываются одно на другое, что и свидетельствует о том, что малое зеркало перпендикулярно плоскости азимутального лимба.
•В двух других случаях (рис. 9.11б,в) малое зеркало неперпендикулярно плоскости азимутального лимба. Для устранения неперпендикулярности необходимо:
• |
вращая угломерный барабан, установить изображения светила на одной горизонтали; |
|||
• |
вращая верхний регулировочный винт 12 (рис. 9.7) малого зеркала, добиться точного |
|||
наложения изображений светила. |
|
|
|
|
|
или |
или |
или |
|
|
|
|
|
|
а) |
б) |
в) |
Рис. 4. Проверка перпендикулярности малого зеркала плоскости азимутального лимба по Солнцу
Примечание:
•Аналогично (кроме п.3) эта выверка выполняется и по звезде.
56. Плавание при помощи РЛС
Судовая РЛС применяется главным образом для определения места судна по измеренным до ориентиров расстояниям. При наличии точечных или имеющих характерные очертания ориентиров можно для этого использовать и радиолокационные пеленги (РЛП).
Реализация определения места судна с помощью РЛС зависит и от того, как точно опознаны те ориентиры,
по которым производятся замеры расстояний (DР) и пеленгов (РЛП).
При подходе к берегу с моря возникает задача опознавания района нахождения судна. Основными признаками для опознавания берега является конфигурация береговой черты, отдельно лежащие в море скалы, островки и т.п.
Опознавание береговых объектов для последующего определения места судна может производиться или способом веера пеленгов и расстояний, или способом траверзных расстояний.
1. Способ веера пеленгов и расстояний.
Этот способ обычно применяется при изрезанном обрывистом береге или в том случае, когда на берегу (или в море) имеются характерные ориентиры.
Сущность способа состоит в следующем (рис. 21.1):
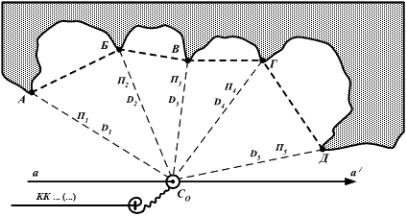
Рис. 21.1. Способ веера пеленгов и расстояний
На экране ИКО РЛС подбираются хорошо видимые и характерные объекты. Затем в быстрой последовательности измеряются РЛП и DР до этих объектов (Ор. А – РЛП1, DР1; Ор. Б – РЛП2, DР2; Ор. В –
РЛП3, DР3; Ор. Г – РЛП4, DР4; Ор. Д – РЛП5, DР5). На момент средних наблюдений (Ор. В) замечается  . На листе кальки проводится прямая а–а′ и на ней из произвольной точки (т. С0) прокладываются истинные
. На листе кальки проводится прямая а–а′ и на ней из произвольной точки (т. С0) прокладываются истинные
значения (Пi = РЛПi + К, Di = DРi + DP) всех измеренных пеленгов и расстояний в масштабе путевой навигационной карты.
Соединив штриховой линией (– – –)точки пеленгов, соответствующих измеренным (и исправленным) расстояниям, получаем ломаную линию, которая и будет приближенным изображением контура берега.
Подготовленную таким образом кальку перемещают по путевой карте так, чтобы линия а–а′ всегда оставалась параллельной курсу судна, а ломаная (штриховая) линия в наибольшей степени совпадала бы с изображением берега на карте и чтобы большее число П и D соответствовало характерным ориентирам на берегу, и если так, то это значит, что участок побережья опознан. В т. С0 кальки делается укол циркулемизмерителем и эта точка (т. С0), но уже на путевой навигационной карте, считается ориентировочным местом судна на средний момент наблюдений.
Если скорость судна при измерении радиолокационных пеленгов (РЛП) и расстояний (DР) более 12 узлов,
то время и отсчет лага  замечаются при каждом измерении РЛП и DР и прокладка их на кальке производится не из одной точки (т. С0), а из точек, соответствующих месту судна в момент каждого измерения. В дальнейшем – аналогично до укола циркулем-измерителем в точке, соответствующей последнему измерению РЛП и DР.
замечаются при каждом измерении РЛП и DР и прокладка их на кальке производится не из одной точки (т. С0), а из точек, соответствующих месту судна в момент каждого измерения. В дальнейшем – аналогично до укола циркулем-измерителем в точке, соответствующей последнему измерению РЛП и DР.
Место судна этим способом опознается тем точнее, чем больше взято пеленгов и расстояний и чем характернее выражены контуры наблюдаемых ориентиров.
2. Способ траверзных расстояний (рис. 21.2).
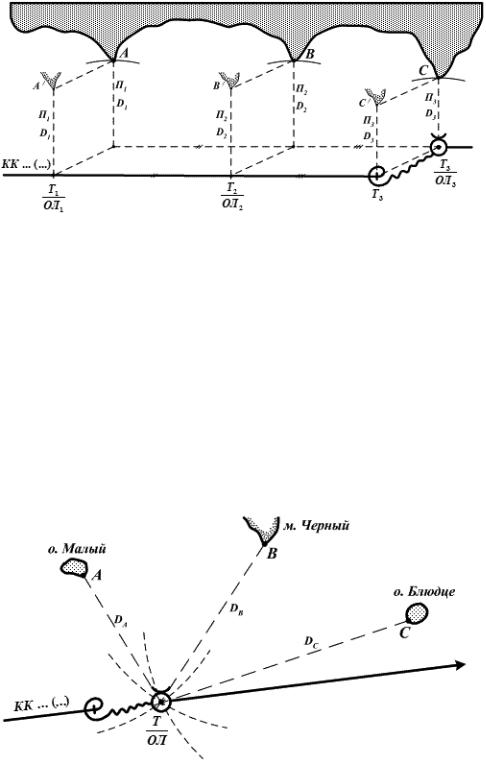
Рис. 21.2. Способ траверзных расстояний
Наблюдатель измеряет расстояния до береговых ориентиров, эхо-сигналы которых видны на экране, когда они приходят на один и тот же курсовой угол, лучше всего на траверз, и в момент измерения расстояний
замечает время и отсчет лага  . Затем на листе кальки прокладывает линию курса со счислимыми
. Затем на листе кальки прокладывает линию курса со счислимыми
точками каждого измерения 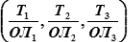 . Из соответствующих точек по КУ и D наносит объекты (А′, В′, С′). Подготовленную таким образом кальку накладывает на путевую навигационную карту и перемещает ее так, как и при первом способе. В результате совпадения ориентиров на кальке и карте наблюдатель получает уточненное положение линии пути и места судна.
. Из соответствующих точек по КУ и D наносит объекты (А′, В′, С′). Подготовленную таким образом кальку накладывает на путевую навигационную карту и перемещает ее так, как и при первом способе. В результате совпадения ориентиров на кальке и карте наблюдатель получает уточненное положение линии пути и места судна.
21.3.2. Определение места судна по расстояниям до нескольких ориентиров
1. Расстояния измеряются до точечных ориентиров (рис. 21.3).
Рис. 21.3. Определение места судна по расстояниям до нескольких точечных ориентиров
Наблюдатель последовательно измеряет расстояния до нескольких ориентиров (А, В, С) с помощью подвижного кольца дальности (ПКД) РЛС (ПКД совмещают с той частью изображения, которая больше
всего выступает в сторону судна).
Вначале измеряют DР до ориентиров близких к траверзу судна; в последнюю очередь – до находящихся на острых или тупых курсовых углах (ор. С).
Если скорость хода судна более 12 узлов, измерения следует приводить к одному месту (последнему замеру DР). По исправленным значениям расстояний (D = DР + DР) определяем на путевой навигационной карте обсервованное место судна, как точку пересечения дуг окружностей, проведенных от мест ориентиров, радиусами R = D (DA, DB, DC).
2. Расстояния измеряются до участка береговой черты с плавными очертаниями и «точечного» ориентира (рис. 21.4).
Рис. 21.4. Определение места судна по расстояниям до ориентиров
От точечного ориентира радиусом, равным измеренному и исправленному расстоянию до него проводят дугу окружности и на ней ищут место, откуда дуга, проведенная радиусом, соответствующим второму измеренному и исправленному расстоянию, касалась бы плавной береговой черты.
Положение острия циркуля будет соответствовать обсервованному месту судна.
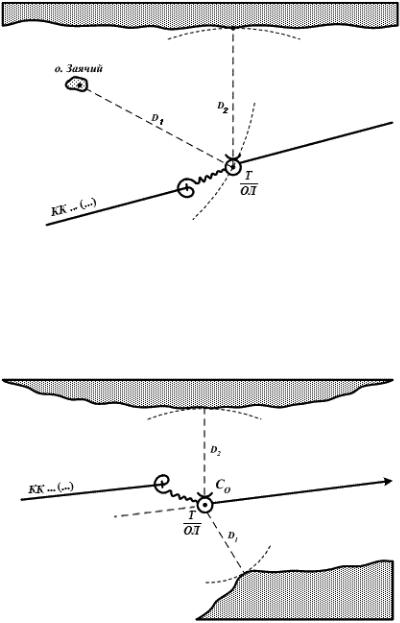
3. Расстояния измеряются до участков береговой черты с плавными очертаниями (рис. 21.5).
Рис. 21.5. Определение места судна по расстояниям
В этом случае нужно измерять расстояния DP1 и DP2 до ближайших к судну точек береговой черты.
Затем на кальку наносят линию курса судна и из какой-либо точки этой линии (т. С0) проводят дуги окружностей радиусами, равными измеренным и исправленным расстояниям D1 = DP1 + DP и D2 = DP2 +
DP.
Дуги проводят примерно в районе тех курсовых углов (КУ), на которых были измерены эти расстояния. Кальку накладывают на карту так, чтобы общий центр дуг находился примерно в районе счислимого места. Передвигая кальку по путевой навигационной карте, находят такое ее положение, при котором дуги коснутся обоих участков берега (рис. 21.5).
Положение центра дуг в этот момент и определит обсервованное место судна.
Если участки береговой черты параллельны, место судна определить таким образом нельзя. Если при измерении DP1 и DP2 измерялись и РЛП1, РЛП2, можно обойтись и без кальки.
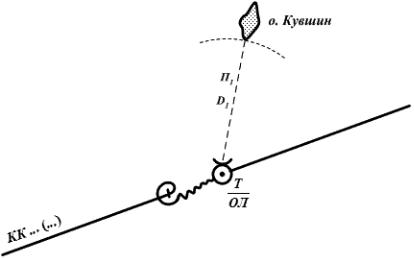
21.3.3.Определение места судна по радиолокационному пеленгу
ирасстоянию до одного ориентира (рис. 21.6)
Рис. 21.6. Определение места судна по пеленгу и расстоянию до одного ориентира
Этот способ применяется тогда, когда на экране ИКО РЛС виден только один хорошо различимый, лучше всего точечный, ориентир.
Обсервованное место получают на линии пеленга на измеренном и исправленном расстоянии до ориентира.
При прокладке линии пеленга не следует забывать исправлять его значение поправкой курса (ΔК + РЛП = ИП), а измеренное расстояние DP исправлять поправкой измерения дистанции (ΔDP).
ИП = РЛП + К |
(21.12) |
D = DP + DP |
(21.13) |
57. Международные документы по безопасной перевозке грузов
•Международная Конвенция по охране человеческой жизни на море. 1974 г. (Консолидированный текст Конвенции СОЛАС-74,1993 г.). С поправками по состоянию на 06 июня 1996 г.
•Международная Конвенция по предотвращению загрязнения с судов. 1973/78 (МАРПОЛ-73/78): - Книга I — современный текст положений статей, протоколов и пяти приложений МАРПОЛ-73/78;
- Книга 2 — толкование правил Приложений к Конвенции, руководства и наставления.
•Международная Конвенция о грузовой марке. 1966 г.
•Международная Конвенция по подготовке и дипломированию моряков. 1978 г. (ПДМНВ-78). Изменения, принятые Конференцией 1995 г.
•Международный морской Кодекс по опасным грузам. IMDG CODE 2000 Edition. ЦНИИМФ, СПб.,

2001 г
•Международный Кодекс по безопасной перевозке зерна насыпью. 1994 г. (МЗК).
•Кодекс безопасной практики размещения и крепления грузов. 1994 г. (Кодекс РКГ).
•Кодекс безопасной практики для судов, перевозящих палубные лесные грузы. 1994 г. (Кодекс ПЛГ).
•Кодекс безопасной практики перевозки твердых навалочных грузов. 1991 г. Поправки 1992 г.
(Кодекс НГ).
•Международная Конвенция по безопасности контейнеров (КБК, 1972 г.) с поправками 1981 и 1983
гг.
•Таможенная Конвенция, касающаяся контейнеров. 1972 г. (КТК).
•Кодекс безопасной практики погрузки и разгрузки балкеров.
•Рекомендации по безопасной транспортировке опасных грузов и связанной с этим деятельности в портах. 1995 г.
•Кодекс безопасной перевозки отработавшего ядерного топлива, плутония и высокорадиоактивных отходов в контейнерах на борту судна (Кодекс ОЯТ).
•Европейское соглашение о международных перевозках скоропортящихся продуктов и о специальных транспортных средствах, предназначенных для этих перевозок (СПС).
•Резолюция ИМО А.742(18) от 04 ноября 1993 г. «Процедуры контроля за эксплуатационными требованиями, относящимися к безопасности судов и предотвращению загрязнения».
•Томас Р. Е. Свойства и укладка грузов: Справочное пособие (STOWAGE),
•Руководство по укладке грузов в грузовые контейнеры или транспортные средства ИМО/МОТ.
•Руководство по размещению и укладке груза в грузовых контейнерах, съемных кузовах и транспортных средствах и по обработке и креплению контейнеров. ЕЭК ООН 1995 г. (ЕЭК — Европейская Экономическая Комиссия ООН).
•Руководство по разработке судовых планов чрезвычайных мер по борьбе с загрязнением нефтью
(Резолюция МЕРС. 54(32) от 06.03.92 г.).
•Руководство по оказанию первой медицинской помощи (РПМП-MFAG).
58.Судовой Хронометр. Измерение времени на судне. Гринвичское, международное, стандартное корректируемое, поясное, местное и судовое время.
Хронометр.
Описание хронометра.
Основным прибором, предназначенным для определения и хранения точного времени на судне является хронометр - переносные пружинные часы наиболее точного изготовления.
Корпус морского хронометра подвешивается при помощи карданова подвеса внутри деревянного футляра, который помещается во внешний футляр, снабженный мягкой внутренней обивкой и ремнем для перевозки хронометра.
В центре циферблата, разбитого на 12 часов, укреплены часовая и минутная стрелки, движущиеся по общему циферблату. Ниже располагается секундная стрелка, перемещающаяся по секундному циферблату скачками через 0,5 секунд. В верхней части циферблата хронометра расположен циферблат завода, разделенный штрихами на семь частей по 8 часов каждый. Оцифровка интервалов дана от 0 до 56ч, т.е. максимальный завод рассчитан на 56 часов работы хронометра.
По циферблату завода движется стрелка, которая показывает количество часов, протекшее с момента завода хронометра.
Хронометр следует заводить ежесуточно в одно и то же время (например, в 8ч утра), чтобы в течение каждых суток действовала одна и та же часть пружины, что обеспечивает постоянство суточного хода. Обычно заводят хронометр так, чтобы он мог идти двое суток, т.е. после завода стрелка завода должна указывать на деление 8ч.
А перед заводом при условии регулярного завода в одно и тоже время стрелка циферблата завода должна указывать на деление с цифрой 32ч
Поправкой хронометра называют разность между всемирным временем и показанием хронометра в один и тот же физический момент, т. е.