

5. Геометричний метод вирішення злп
У випадку, коли число змінних у ЗЛП дорівнює двом, завдання можна вирішити геометрично. Розглянемо приклади.
Приклад 1
f
=
![]() max
max
Кожне
припустиме рішення ЗЛП будемо зображувати
точкою
![]() координатної
площини. Побудуємо ОПР (рис. 5.1). Розглянемо
перше лінійне обмеження
координатної
площини. Побудуємо ОПР (рис. 5.1). Розглянемо
перше лінійне обмеження![]() .
Сукупність точок площини, що задовольняють
цьому обмеженню, являє собою напівплощину,
обмежену прямою
.
Сукупність точок площини, що задовольняють
цьому обмеженню, являє собою напівплощину,
обмежену прямою![]() .
Спочатку побудуємо цю граничну пряму
(її можна побудувати по двох точках:
(0,6) і (9,0). Ця пряма розіб'є площину на
дві напівплощини. Щоб вирішити питання
про те, яку із цих двох напівплощин
визначає нерівність
.
Спочатку побудуємо цю граничну пряму
(її можна побудувати по двох точках:
(0,6) і (9,0). Ця пряма розіб'є площину на
дві напівплощини. Щоб вирішити питання
про те, яку із цих двох напівплощин
визначає нерівність![]() ,
візьмемо в одній з напівплощин яку-небудь
точку, що не лежить на граничній прямій,
і підставимо її координати в нерівність.
Наприклад, за таку точку візьмемо
початок координат - точку (0,0). Оскільки
,
візьмемо в одній з напівплощин яку-небудь
точку, що не лежить на граничній прямій,
і підставимо її координати в нерівність.
Наприклад, за таку точку візьмемо
початок координат - точку (0,0). Оскільки![]() ,
то напівплощина, обумовлена нерівністю
,
то напівплощина, обумовлена нерівністю![]() ,
містить точку (0,0). Аналогічно знаходимо
напівплощини, обумовлені іншими
обмеженнями. Далі визначимо ОПР як
загальну частину отриманих напівплощин.
Одержимо опуклий багатокутник
,
містить точку (0,0). Аналогічно знаходимо
напівплощини, обумовлені іншими
обмеженнями. Далі визначимо ОПР як
загальну частину отриманих напівплощин.
Одержимо опуклий багатокутник
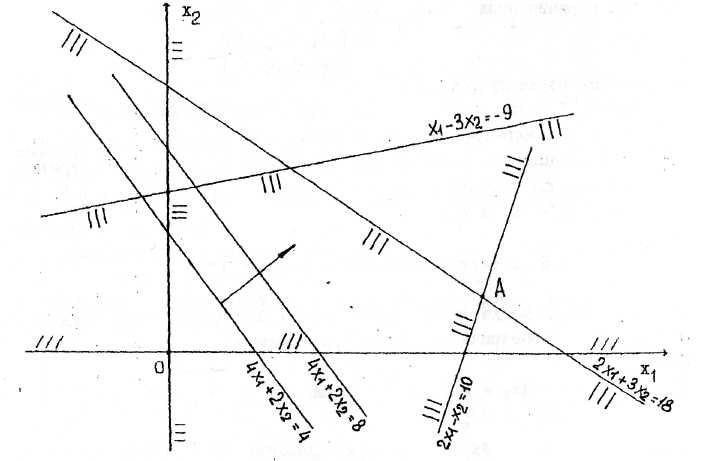
Рис.5.1.
Тепер залишилося визначити максимум цільової функції на ОПР. Для цього побудуємо лінії рівня цільової функції. Лінія рівня - це безліч точок площини, у яких цільова функція приймає постійне значення. Оскільки цільова функція
f
=![]() ,то кожна лінія рівня має вигляд
,то кожна лінія рівня має вигляд![]() . Бачимо, що при різних значеннях параметра
С маємо паралельні прямі. Побудуємо,
наприклад, дві лінії рівня, поклавши С
= 4 і С = 8. Відзначимо стрілкою напрямок,
у якому переміщається лінія рівня при
збільшенні С. Пересуваючи лінію рівня
в зазначеному напрямку, знайдемо точку
ОПР, у якій С має найбільше значення. Це
буде точка А. Вона є результатом
перетинання двох прямих:
. Бачимо, що при різних значеннях параметра
С маємо паралельні прямі. Побудуємо,
наприклад, дві лінії рівня, поклавши С
= 4 і С = 8. Відзначимо стрілкою напрямок,
у якому переміщається лінія рівня при
збільшенні С. Пересуваючи лінію рівня
в зазначеному напрямку, знайдемо точку
ОПР, у якій С має найбільше значення. Це
буде точка А. Вона є результатом
перетинання двох прямих:![]() і
і![]()
Для знаходження координат точки А вирішимо систему
Одержимо оптимальне рішення
![]()
Приклад
2. f =![]() min
min
![]()
рис. 5.2.
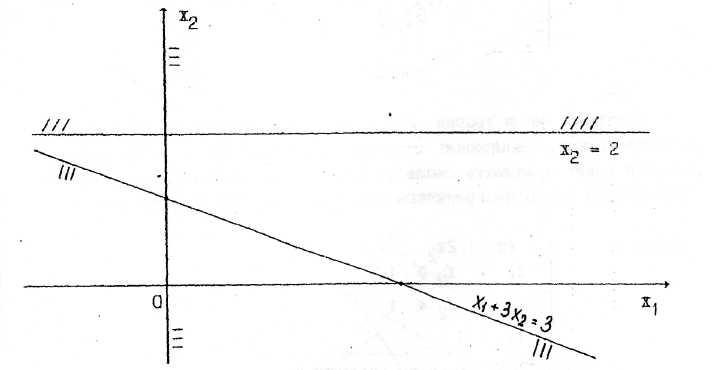
У цьому прикладі напівплощини, обумовлені лінійними обмеженнями, не мають загальних точок. Тому ЗЛП нерозв'язна через порожнечу ОПР.
Приклад
3. f =![]()
У даному прикладі (рис.5.3) ОПР - опукла необмежена багатокутна область.
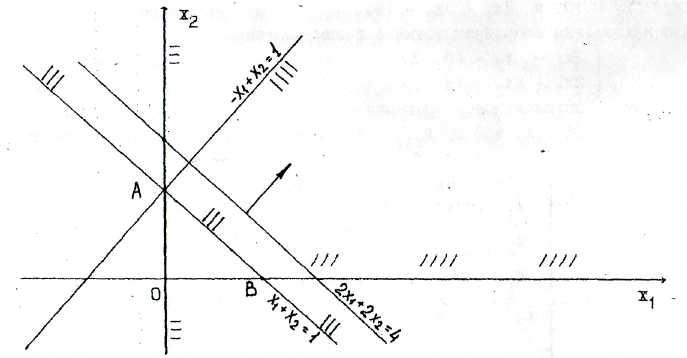
рис. 5.3.
Побудуємо
лінію рівня
![]() .
Пересуваючи лінію рівня в напрямку,
зазначеному стрілкою, бачимо, що на ОПР
цільова функція може приймати які
завгодно великі значення. Тому ЗЛП
нерозв'язна через необмеженість зверху
на ОПР цільової функції.
.
Пересуваючи лінію рівня в напрямку,
зазначеному стрілкою, бачимо, що на ОПР
цільова функція може приймати які
завгодно великі значення. Тому ЗЛП
нерозв'язна через необмеженість зверху
на ОПР цільової функції.
Приклад
4. f
=![]()
Цей
приклад відрізняється від попереднього
тільки тим, що цільову функцію потрібно
мінімізувати, а не максимізувати. Лінію
рівня потрібно переміщати в напрямку,
протилежному тому, що зазначено на
рисунку 5.3 стрілкою. Оскільки лінія
рівня паралельна прямій
![]() ,
то мінімальне значення на ОПР цільова
функція досягає у всіх точках відрізка
АВ. Щоб указати конкретне оптимальне
рішення задачі, потрібно виписати
координати якої-небудь точки цього
відрізка.
,
то мінімальне значення на ОПР цільова
функція досягає у всіх точках відрізка
АВ. Щоб указати конкретне оптимальне
рішення задачі, потрібно виписати
координати якої-небудь точки цього
відрізка.
Наприклад,
![]()
Приклад 5. Вирішимо геометрично задачу про використання
обладнання, що розглядалася в параграфі 4.1. Її математична модель
f
=![]()
Побудуємо
ОПР (рис 5.4). Потім проведемо лінію рівня
![]() .
Укажемо стрілкою напрямок, у якому
переміщається лінія рівня
.
Укажемо стрілкою напрямок, у якому
переміщається лінія рівня![]() із
збільшенням C. Максимум цільової функції
на ОПР досягається в точці А. Для
відшукання координат точки А вирішимо
систему:
із
збільшенням C. Максимум цільової функції
на ОПР досягається в точці А. Для
відшукання координат точки А вирішимо
систему:
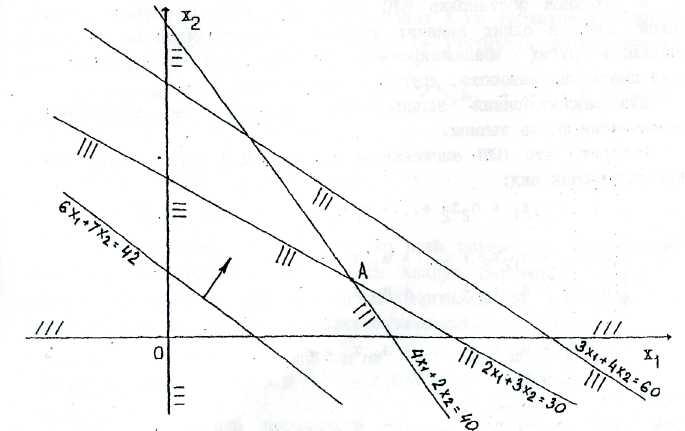
рис.5.4.
Звідси
![]()
Відповідь. Оптимальний план такий: виробів А потрібно робити 7,5 одиниць, виробів В -5 одиниць; при цьому прибуток буде дорівнювати 80 грошовим одиницям.
Геометричний метод можна використовувати для вирішення ЗЛП із числом змінних n = 3. При більшому числі змінних ЗЛП не допускає наочного геометричного вирішення. Разом з тим для довільного числа змінних справедливі твердження:
1) область припустимих рішень являє собою опуклий багатогранник;
2) якщо ЗЛП розв'язна, то оптимальне рішення досягається в одній з вершин опуклого багатогранника.