

II. Корни характеристического уравнения комплексные
Этапы расчётов те же, что и в предыдущем примере, поэтому нумерацию этапов и названия далее не приводим.
Пусть задана передаточная функция

Решаем характеристическое уравнение

Корни комплексные, поэтому далее решение идет по другому пути.
Выделяем полный квадрат в знаменателе, а затем, как и раньше раскладываем выражение h(p) на сумму табличных выражений:

Из равенства второй и последней дробей получаем систему уравнений, используемую для расчета значений коэффициентов А,ВиС,


Решая, эту систему уравнений, получаем:

Окончательно изображение переходного процесса примет вид:

Переходим согласно табл.1.1 от изображений к оригиналам:
 (1.17)
(1.17)
Далее находим функцию веса:
 (1.18)
(1.18)
Определение времени счета:
Преобразуем выражение h(t) (1.17) следующим образом:
 (1.19)
(1.19)
Сумму в скобке можно представить в виде одной функции sin:
 (1.20)
(1.20)
Мы имеем право на замену дробей 0,242и0,97наcos2t иsin2t,соответственно, т.к. сумма их квадратов равна1:0,2422+0,972=1. Это свойство коэффициентов приsin2t иcos2t(в данном случае) в выражении (3.28) верно всегда при выполнении преобразований, приведенных в этом выражении.
Cучетом (1.20)h(t)можно представить в таком виде:
 ,
,
где
 рад (вычислить можно по любой формуле
из приведенного их ряда).
рад (вычислить можно по любой формуле
из приведенного их ряда).
Окончательно:
 (1.21)
(1.21)
Так как функция sin по модулю не превосходит1, то время переходного процесса можно вычислить так же, как и раньше, из уравнения:
 (1.22)
(1.22)
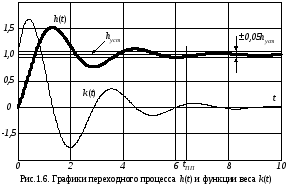
График переходного процесса колебательный и будет содержать экстремальные точки. Для их нахождения используется производная от h(t),т.е. функция весаk(t):
 k(t)=0,
1,875e-0,5tsin2t+e-0,5tcos2t=0,
tg2t=-1/1,875=-0,533,
k(t)=0,
1,875e-0,5tsin2t+e-0,5tcos2t=0,
tg2t=-1/1,875=-0,533,
откуда
te=(arctg(-0,533)+n)/2=-0,245+n/2 (рад), где n=1,2,3...
Значения te: te1=1,325 c, te2=2,9 c; te3=4,465 c, te4=6,03 c и т.д.
Определение шага вычислений:
Из времени tпп=6,1 снаходим шаг вычислений t=1с; Время счетаt=0..7.
Далее заполняется таблица (табл.1.3) вычислений при найденных значениях t и затем строятся графикиh(t) и k(t) (рис.1.6).
Табл. 1.3
|
t |
0 |
1,325 |
2 |
2,9 |
3,7 |
4,465 |
5 |
6,03 |
7 |
∞ |
|
h(t) |
0 |
|
|
|
|
|
|
|
|
1 |
|
k(t) |
1 |
|
|
|
|
|
|
|
|
0 |
Вопросы и задания
1. Обоснуйте вид изображений переходного процесса h(t) и функции веса k(t), а также связи между ними
2. Поясните суть табличного метода расчета переходного процесса h(t).
3. Как определяются время tПП переходного процесса и шаг вычислений при расчете и построениях графика переходного процесса h(t) при действительных корнях характеристического уравнения передаточной функции ?
4. Как определяются время tПП переходного процесса и шаг вычислений при расчете и построениях графика переходного процесса h(t) при комплексных корнях характеристического уравнения передаточной функции ?
5. Как определяются экстремальные точки графика колебательного переходного процесса h(t) ?