

-
Приведите основную информацию об основных принципах частотного регулирования асинхронных двигателей.
В силу идентичности трех фазных обмоток АД принято в расчетах использовать однофазную модель АД, по которой все расчеты токов и напряжений в точности совпадают с расчетами на реальном трехфазном АД, а энергетические характеристики, вычисленные для одной фазы, умножаются на 3. Ротор, если не учитывать эффекты вытеснения тока в его обмотках, также представляется тремя однофазными обмотками.

Основной является Т-образная схема замещения АД (одной фазы), которая приведена на рис.13.1. Схема описывается системой уравнений
 (13.1)
(13.1)
Электромеханическая мощность и вращающий момент на валу АД
 ,
(13.2)
,
(13.2)
где ω0 – частота вращения магнитного поля статора.
Из-за смешанного
соединения элементов в Т-образной схеме
формулы расчета токов и напряжений
ветвей (обмоток АД) получаются громоздкие.
Поэтому в инженерных расчетах используется
более простая, но достаточно точная
Г-образная схема замещения (рис.13.2), где
 .
.
Ток ротора
 из Г-образной схемы определяется формулой
из Г-образной схемы определяется формулой
 (13.3)
(13.3)
Подставив (13.3) в формулу (13.2), получим выражение момента АД
 (13.4)
(13.4)
Максимальное значение момента М называется критическим моментом МКР, а скольжение для момента МКР называется критическим скольжением sKP.
Критическое скольжение определяется из условия максимума М:
 откуда
откуда
 (13.5)
(13.5)
В формуле (13.5) пренебрегли сопротивлением R1, так как оно мало в сравнении с ХК. После такого упрощения выражение (13.4) приводится к удобной при расчетах формуле Клосса
 ,
где
,
где
 (13.6)
(13.6)
Если считать, что
индуктивные сопротивления рассеяния
обмоток, входящие в ХК, изменить нельзя,
то в соответствии с (13.5) и (13.6), вращающим
моментом М можно управлять, изменяя
величину U1 и частоту ω1 напряжения
питания и сопротивление R'2 роторной
цепи. Изменение только величины напряжения
питания U1 изменяет только критический
момент UКР пропорционально
 (13.6), а sKP (13.5) не изменяется (рис.13.3а).
Изменение только
(13.6), а sKP (13.5) не изменяется (рис.13.3а).
Изменение только

частоты ω1=рП·ω0
питающего напряжения U1 изменяет
(рис.13.3б) частоту ω0 холостого хода АД
прямо пропорционально ω1, критический
момент МКР (13.6) обратно пропорционально
 и sKP (13.5) обратно пропорционально ω1.
Пропорциональное изменение и величины
U1, и частоты ω1 напряжения питания
изменяет ω0 и критическое скольжение
sKP (13.5), а критический момент остается
неизменным, что следует из преобразований
выражения (13.6)
и sKP (13.5) обратно пропорционально ω1.
Пропорциональное изменение и величины
U1, и частоты ω1 напряжения питания
изменяет ω0 и критическое скольжение
sKP (13.5), а критический момент остается
неизменным, что следует из преобразований
выражения (13.6)
 (13.7)
(13.7)
У АД с фазным
ротором в цепь ротора вводят активное
сопротивление RP, в результате чего
приведенное активное сопротивление
роторной цепи возрастает от
 до величины
до величины
 .
Критическое скольжение sKP прямо
пропорционально активному сопротивлению
роторной цепи (13.5) и, поэтому, sKP
увеличивается, а критический момент
МКР не зависит от этого сопротивления
и, поэтому, МKP (13.6) не изменяется (рис.13.4).
.
Критическое скольжение sKP прямо
пропорционально активному сопротивлению
роторной цепи (13.5) и, поэтому, sKP
увеличивается, а критический момент
МКР не зависит от этого сопротивления
и, поэтому, МKP (13.6) не изменяется (рис.13.4).
Автоматическое регулирование момента
АД с короткозамкнутым ротором при питании его от ПЧ с АИН
Необходимость автоматического регулирования момента обоснована в теме 6. Кроме того контур регулирования момента входит как подчиненный контур в САР частоты вращения. Введение подчиненного регулирования позволяет обойтись без Д-части в регуляторе скорости.
При частотном управлении моментом АД ставят целью поддержать постоянным либо потокосцепление Ψ1 статора (в АЭП с АИН), либо потокосцепление Ψ2 ротора (в АЭП с АИТ). Реализация таких управлений позволяет получить механические характеристики АЭП вида
М=СМ(ω1 -рПω) = СМ рП (ω0 –ω), (15.1)
где СМ – постоянный коэффициент; ω1 – частота питающего напряжения; ω0 – синхронная частота вращения поля статора; ω – частота вращения ротора; рП – число пар полюсов статора АД.
Эти характеристики совпадают по форме с механическими характеристиками ДПТ
 (15.2)
(15.2)
При питании АД от
ПЧ с АИН можно независимо изменять
величину U1 и частоту ω1 напряжения
статора. Найдем законы изменения U1 и
ω1, при которых будет Ψ1=const. Из уравнения
статора
 для установившегося режима получаем
для установившегося режима получаем
 (15.3)
(15.3)
Если пренебречь малым значением падения напряжения R1I1 на активном сопротивлении R1 обмотки статора, то условие постоянства Ψ1 достигается при пропорциональном изменении U1 и ω1
 (15.4)
(15.4)
Механические характеристики таковы (рис.13.3в), что критический момент МКР у всех характеристик один и тот же. На рабочем участке механическая характеристика описывается приближенным выражением
 (15.5)
(15.5)
Соотношение (15.4) показывает, что сигналы задания для контуров регулирования величины U1 и частоты ω1 напряжения в схеме АЭП должны быть прямо пропорциональными друг другу.
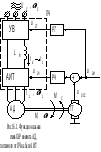
Функциональная
схема САР момента при питании АД от ПЧ
с АИН приведена на рис.15.1. Применить в
схеме классическую отрицательную
обратную связь по моменту (рис.15.2)
невозможно из-за отсутствия надежных
и дешевых датчиков момента промышленного
применения. Вместо обратной связи по
моменту в схеме применена положительная
обратная связь по скорости с сигналом
uОСС. Датчиком частоты вращения является
тахогенератор ТГ. С такой нестандартной
обратной связью при определенных
соотношениях между параметрами звеньев
автоматики оказывается возможным
управление моментом так, чтобы механическая
характеристика АЭП имела вид (15.1).
Регулирование момента получилось астатическим с нулевой ошибкой регулирования, так как момент М пропорционален сигналу задания uЗМ независимо от частоты вращения ω АД (15.9). Механические характеристики получились идеальными (рис.15.3), у которых M=const. Частота вращения ω АД при заданном моменте М определяется частотой ω0 вращения поля статора или частотой ω1 напряжения питания АД (15.10).
Недостатком рассмотренной САР момента является то, что на малых частотах вращения поддержание постоянства потокосцепления Ψ1 статора обеспечением простой пропорции (15.4) нельзя, так как нельзя пренебрегать членом R1I1 в (15.3). Поэтому на малых частотах вращения механические характеристики АЭП будут отличаться от приведенных на рис.15.3.
Автоматическое регулирование момента
АД с короткозамкнутым ротором при питании его от ПЧ с АИТ
Вводная часть та же, что и в теме 15 от начала до формулы (15.2) включительно.
При питании АД от ПЧ с АИТ можно независимо изменять величину I1 и частоту ω1 тока статора.
Из курса электрических машин известна формула вращающего момента АД вида
 (16.1)
(16.1)
Если поддерживать постоянство потокосцепления ротора Ψ2=const, то механическая характеристика (16.1) будет иметь вид (15.1).
Функциональная схема САР момента при питании АД от ПЧ с АИТ приведена на рис.16.1.
В контуре регулирования частоты с регулятором РЧ при сигнале задания момента uЗМ обратная связь не является сигналом момента, а является сигналом положительной обратной связи uОСС по скорости. Контур регулирования тока разомкнутого типа использует только сигнал uЗМ.
Регулирование момента получилось астатическим с нулевой ошибкой регулирования, так как момент М пропорционален сигналу задания uЗМ независимо от частоты вращения ω АД (16.4). Механические характеристики получились идеальными (рис.16.2), у которых M=const. Частота вращения ω АД при заданном моменте М определяется частотой ω0 вращения поля статора или частотой ω1, с которой изменяется ток питания АД (16.5).
 (16.8)
(16.8)
Выражение (16.8)
показывает, что для поддержания
постоянства потокосцепления Ψ2 необходимо
ввести в схема АЭП регулятор тока РТ
нелинейного типа такой, чтобы при
изменении сигнала задания момента uЗМ
сигнал задания тока uЗТ изменялся прямо
пропорционально величине  .
(16.9)
.
(16.9)
Схемная реализация нелинейной зависимости (16.9) вполне доступна, причем этого будет достаточно для поддержания постоянства момента при любой частоте вращения АД. В этом преимущество САР момента АД с ПЧ на базе АИТ по сравнению с ПЧ на базе АИН.
-
На табличке с номинальными данными судового силового трансформатора имеется обозначение Υ/∆-11. Объяснить, что характеризует это обозначение и изобразить схематически трансформатор согласно этому обозначению.
 Для
силовых трансформаторов принято
первичную обмотку считать высокого
напряжения а вторичную – низкого.
Для
силовых трансформаторов принято
первичную обмотку считать высокого
напряжения а вторичную – низкого.
 -
линейное напряжение первичной обмотки
-
линейное напряжение первичной обмотки

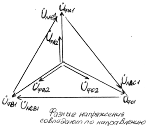 Цифра
11 указывает насколько смещены между
собой линейные напряжения. Это число
называется «группа соединения обмоток».
Существует группа стандартных соединений
(0 – «звезда-звезда») и 10 не стандартных.
Группу соединений нужно учитывать при
включении трансформаторов в параллель..
Цифра
11 указывает насколько смещены между
собой линейные напряжения. Это число
называется «группа соединения обмоток».
Существует группа стандартных соединений
(0 – «звезда-звезда») и 10 не стандартных.
Группу соединений нужно учитывать при
включении трансформаторов в параллель..
-
Электропривод с двигателем постоянного тока независимого возбуждения работает на естественной механической характеристике (рис. ). Момент сопротивления (Мс) постоянный по величине и потенциальный по характеру. Определить, в каких режимах электродвигатель будет работать, если одновременно произвести реверс привода и уменьшить величину, приложенного напряжения и магнитного потока вдвое, а в цепь якоря включить добавочный резистор сопротивлением Rд=Rя?

Уравнение
механической характеристики двигателя:

ЕМХ
проходящая через точку 1:
 ,
,

ИМХ:

Из-за смены полярности напряжения на якоре частота холостого хода стала отрицательной величиной, а при одновременном уменьшении вдвое Uя и Сф эта частота равна -Wo.
Коэффициент
наклона при включении дополнительного
сопротивления равно сопротивлению
якоря ( ).
Наклон увеличится в 8 раз.
).
Наклон увеличится в 8 раз.
-
Машина постоянного тока имеет явно выраженную замедленную коммутацию. Каким будет при этом характер искрения щеток? Как улучшить коммутацию (приблизить к прямолинейному характеру) посредством изменения степени действия добавочных полюсов (ДП) генератора?
Рассмотрим ГПТ:
Положение А: по секции протекает ток(против часовой стрелки) и с левой стороны секции через коллектор-щетку ток выходит наружу в виде Iкол.
На петушке в правой секции In=0
Положение Б: коллекторные пластины закорочены щеткой =>создан КЗ-контур =>создается эдс генератора. В КЗ-контуре устанавливается ток в обеих секциях.
В КЗ контуре устанавливается ток в обоих секциях.
Изменению тока в секции препятствует еси(эдс самоиндукции).Ток изменяется практически по линейному закону. Iл- падает, Iп- растет.
Положение В аналогично А-ток протекает по правой пластине коллектора.
Если к моменту перехода схемы от Б к В ток левой секции не уменьшается до 0, то при сходе щетки с левой пластины коллектора возникает дуга- ЯВЛЕНИЕ ЗАМЕДЛЕННОЙ КОММУТАЦИИ, т.к. Тс в секции окажется большой Тс=Rc/Lc. Это явления хуже следующего.
Если к моменту схода с пластины щетки ток левый Iл не только уменьшается до 0, но с становится противоположного направления- УСКОРЕННАЯ КОММУТАЦИЯ. При сходе щетки с пластины также возникнет ДУГА. Если учесть сопротивление щеточного контакта то окажется что худшее действие оказывает замедленная коммутация, у нее дуга более текучая т.к. постоянная времени в секции окажется большей Тс=Rc/Lc. При ускоренно коммутации Тс мало, и если возникает дуга то она быстро гаснет.

Для уменьшения искрения необходимо применить дополнительные полюса. При установке дополнительных полюсов достигается главная цель: уменьшается евр той секции, коллекторные пластины которой соприкасается со щеткой.
Малая эдс евр- создает малый ток в кз-секции, соответственно будет малая дуга.
-
Что произойдет с работой трехфазного асинхронного электропривода, имеющего вентиляторную нагрузку на валу (рис. ), если в процессе нормальной работы произойдет обрыв одной из фаз (например, сгорел предохранитель в одной из фаз)?
ВВОДНАЯ ЧАСТЬ

Магнитный поток в фазе А :
-всегда на оси катушки
-не вращается
-его можно представить в виде 2х одинаковых по амплитуде вращающихся в противоположные стороны полей



Рассмотрим фазу B
Поток
Фмв()
имеет по отношению к оси B

Противоположно
вращающийся поток
 симметричен относительно оси В.
симметричен относительно оси В.
Рассмотрим фазу C
Поток
Фмс()
имеет по отношению к оси C

Вращаемся
на
 и получаем Фмс().
Поток
и получаем Фмс().
Поток
 располоден симметрично относительно
оси С.
располоден симметрично относительно
оси С.
Эти построения справедливы с 3мя целыми обмотками (норм АД)
Построения приведены ниже

1.Пусть оборвется обмотка фазы А (Uф- не изменилось). В этом случае Фма(),Фма() исчезнут и значения полей будут следующими:
Ф ()=2 Фм()
Ф()=Фм()
От одного снижения Ф() момент уже уменьшится в:

Строим механические характеристики:

По сравнению с моментов, когда все обмотки целые, момент будет равен 40% => двигатель будет вращаться.
Если учесть тот
факт, что напряжение фазных обмоток
(220 В)уменьшится до половины линейного
(190 В), то момент еще уменьшится в ¾ раз
(= )²).
)²).
Окончательно Мвр
упадет до 30%, судя по графику 15-4 двигатель
скорее всего остановится.
-
Что такое модальное управление электроприводом? Приведите характеристики электропривода, настроенного на технический и симметричный оптимум: графики переходных процессов, значений ошибок регулирования, величин времени регулирования и заброса.
На рис.2.1 приведена обобщенная структурная схема ЭП замкнутого типа, в которой источник питания и двигатель образуют силовую часть (СЧ) ЭП.
Метод последовательной коррекции заключается в том, что регулятор включен последовательно с силовой частью. Достоинствами метода последовательной коррекции являются:
1. Регулятор содержит
только маломощные элементы.
2. Синтез передаточной функции регулятора Wрег(р) наиболее прост.
3. Реализация регулятора по определенной таким образом передаточной функции Wрег(р) наиболее проста.
Метод модального управления состоит в том, что передаточная функция разомкнутого контура ЭП Wраз(р) имеет стандартный вид – моду.
В автоматизированном электроприводе (АЭП) применяются две моды, называемые настройками на технический и симметричный оптимумы.
Настройка на технический оптимум
Передаточная функция разомкнутой САУ ЭП имеет вид
 , (2.1)
, (2.1)
где Тμ - малая постоянная времени, входящая в передаточную функцию Wсч(р) силовой части.
Переходный процесс замкнутой САУ ЭП (рис.2.2, график 1) имеет следующие динамические характеристики:
tp.тo=4,7 Тμ, σто=4,3 % (2.2)
АЭП является астатическим 1-го порядка (сомножитель р в знаменателе передаточной функции Wраз(р) имеет первый порядок), поэтому статическая ошибка регулирования равна нулю.
Переходный процесс описывается формулой
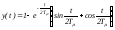 (2.3)
(2.3)

Произведем расчет передаточной функции регулятора Wрег(р), задаваясь различными передаточными функциями Wсч(р).
Будем использовать передаточную функцию силовой части следующего общего вида
 , (2.4)
, (2.4)
в которой постоянная времени T1 меньше всех остальных: T1<{T2, T3,…,Tn}.
Обозначим наименьшую постоянную времени как Тμ=Т1. Остальные постоянные времени назовем большими постоянными времени.
1). Пусть в Wсч(р) имеется только одна большая постоянная времени Т2. Передаточная функция силовой части примет вид
 (2.5)
(2.5)
Так как регулятор и силовая часть включены последовательно, то
 и
и
 (2.6)
(2.6)
Вычисляем
 (2.7)
(2.7)
Синтезирован ПИ-регулятор с коэффициентом передачи kП пропорциональной части и постоянной времени ТИ интегральной части. Этот регулятор реализуется на основе операционного усилителя.
2). Пусть в Wсч(р) имеется две больших постоянных времени Т2 и Т3. Передаточная функция силовой части примет вид
 (2.8)
(2.8)
Вычисляем
 (2.9)
(2.9)
Синтезирован ПИД-регулятор с коэффициентом передачи kП пропорциональной части, постоянной времени ТИ интегральной части и постоянной времени ТД дифференциальной части. Этот регулятор реализуется на основе операционного усилителя. Из-за Д-части регулятор чувствителен к помехам.