

Типовые дифференцирующие звенья сау
К
 дифференцирующим звеньям относят
звенья, выходной сигнал которых
пропорционален производной от входного
сигнала. У дифференцирующих звеньев
нет статической характеристики, так
как связь между входным и выходным
сигналами не взаимно-однозначная, а
именно, для любого постоянного входного
сигнала выходной сигнал в установившемся
режиме будет нулевым.
дифференцирующим звеньям относят
звенья, выходной сигнал которых
пропорционален производной от входного
сигнала. У дифференцирующих звеньев
нет статической характеристики, так
как связь между входным и выходным
сигналами не взаимно-однозначная, а
именно, для любого постоянного входного
сигнала выходной сигнал в установившемся
режиме будет нулевым.
Виды типовых дифференцирующих звеньев:
1. Идеальное дифференцирующее звеноимеет передаточную функцию вида![]()
где
![]() – коэффициент
размерности;
– коэффициент
размерности;
Т – постоянная времени дифференцирующего звена.
Примерами звена являются: тахогенератор (рис.1.17а) с малоинерционным ротором, входным сигналом которого является угол φ поворота ротора, а выходным – э.д.с. е; Д-регулятор на базе операционного усилителя ОУ (рис.1.17б).
Э.д.с.
тахогенератора еТГ,
как известно, прямо пропорциональна
частоте вращения ω
его ротора, которая равна производной
![]() от угла
от угла![]() поворота ротора:
поворота ротора:![]()
Изображение и оригинал переходного процесса имеют вид
![]()
где δ(t) – дельта-функция (см. рис.1.3).
График
переходного процесса (рис.1.18) представляет
собой импульс бесконечно высокий и
бесконечно узкий, площадь которого
равна kT.
Такой сигнал физически нереализуемый
и фактически импульс всегда ограничен
по амплитуде. Если входной сигнал х
изменяется не скачком, то на выходе
идеального дифференцирующего звена
образуется сигнал у
конечной формы. Например, при линейно
изменяющемся входном сигнале x=v.t,
изображением которого согласно табл.1.1
равно
![]() ,
изображение выходного сигнала будет
,
изображение выходного сигнала будет![]() ,
а оригинал согласно табл.1.1 будет равен
,
а оригинал согласно табл.1.1 будет равен![]() .
.
Самым ценным свойством идеального дифференцирующего звена является обеспечение им положительного фазового сдвига +90о. Благодаря этому сдвигу обеспечивается устойчивость САУ, повышается быстродействие и подавляется колебательность (раскачивание) САУ.
2. Реальное (инерционное) дифференцирующее звеноимеет передаточную функцию вида
![]()
где τ – постоянная времени инерции дифференцирующего звена.
Примерами звена являются: тахогенератор (рис.1.17а) с инерционным ротором; дифференцирующие RC-цепь (рис.1.20а) и RL-цепь (рис.1.20б); гидравлический демпфер-амортизатор (рис.1.20в).

Выполним вывод передаточной функции для RC-цепи. Используя закон Ома, получим
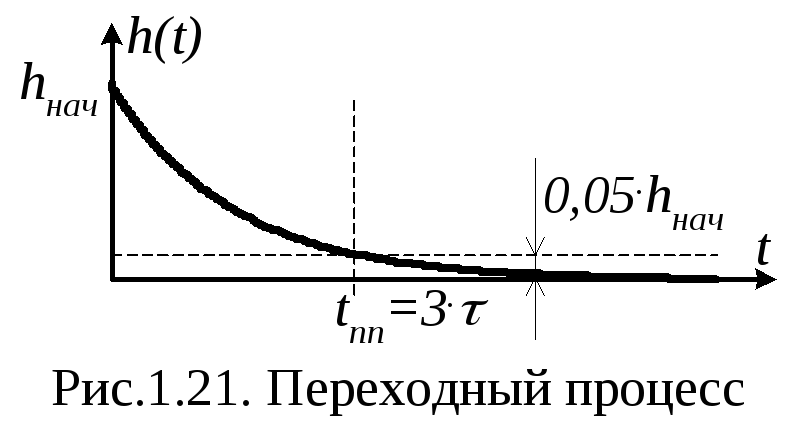

Переходный процесс описывается
выражением ![]()
График переходного процесса приведён на рис.1.21. От начального значения hнач сигнал стремится к нулю при t. Время переходного процесса tпп, определяемое по моменту окончательного вхождения графика в 5% зону допуска от hнач, составляет 3τ.
Фазовый сдвиг звена остается положительным, что благоприятно сказывается на устойчивости, быстродействии САУ, содержащих дифференцирующие звенья.
Типовые интегрирующие звенья сау
К интегрирующим звеньям относят звенья, выходной сигнал которых пропорционален интегралу от входного сигнала. У интегрирующих звеньев нет статической характеристики, так как связь между входным и выходным сигналами не взаимно-однозначная, а именно, при нулевом входном сигнале величина выходного сигнала в установившемся режиме может быть любой.
Виды типовых интегрирующих звеньев:
1. Идеальное интегрирующее звеноимеет передаточную функцию вида![]()
где k – коэффициент размерности; Т – постоянная времени звена.
Примерами звена являются: двигатель постоянного тока (рис.1.23а) с малоинерционным ротором, входным сигналом которого напряжение питания uя якоря, а выходным – угол φ поворота ротора; И-регулятор на базе операционного усилителя ОУ (рис.1.23б).

Изображение и оригинал переходного
процесса имеют вид
![]()
График переходного процесса (рис.1.23в) представляет собой прямую линию.
Самым большим недостатком идеального интегрирующего звена является отрицательный фазовый сдвиг -90о. Из-за этого сдвига САУ, содержащая идеальное интегрирующее звено, может стать неустойчивой, повышаются колебательность (раскачивание) САУ, перерегулирование.
2.Реальное(инерционное)интегрирующее
звеноимеет передаточную функцию
вида![]()
где τ – постоянная времени инерции интегрирующего звена.
П римерами
звена являются: двигатель постоянного
тока (рис.1.23а) с инерционным ротором;
гидравлический сервопривод (рис.1.25а),
у которого входным сигналом является
давление масларм,
а выходным – перемещение у
штока силового поршня.
римерами
звена являются: двигатель постоянного
тока (рис.1.23а) с инерционным ротором;
гидравлический сервопривод (рис.1.25а),
у которого входным сигналом является
давление масларм,
а выходным – перемещение у
штока силового поршня.
Изображение и оригинал переходного процесса имеют вид

График переходного процесса приведен на рис.1.25б.
3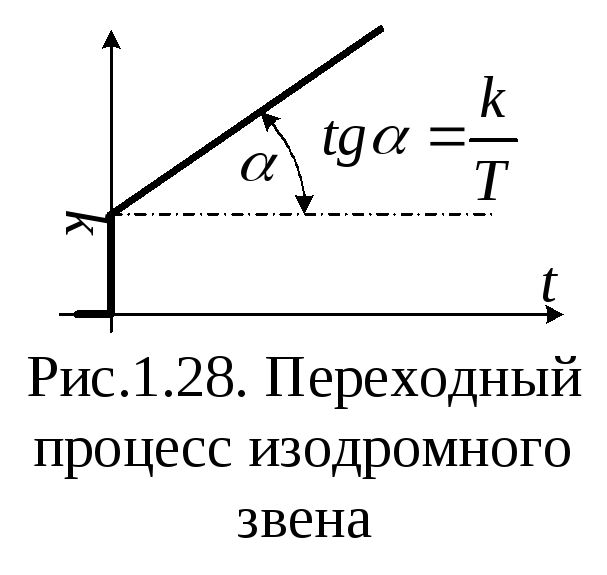
 .
Изодромное звеноимеет передаточную
функцию вида
.
Изодромное звеноимеет передаточную
функцию вида![]() (1.43)
(1.43)
Примерами
звена являются: пропорционально-интегральный
(ПИ) регулятор на базе ОУ (рис.1.27а); упруго
присоединенный катаракт (рис. 1.27б), у
которого входным сигналом х
является сила F,
а выходным – перемещение у
точки, к которой приложена эта сила.
Передаточную функцию (1.43) можно
преобразовать к виду ![]() ,
,
из
которого следует, что изодромное звено
эквивалентно двум последовательно
соединенным звеньям (рис.1.27в): идеальному
интегрирующему звену с передаточной
функцией
![]() и звену, содержащему пропорциональное
и идеальное дифференцирующее звено, с
передаточной функцией (Тр+1).
и звену, содержащему пропорциональное
и идеальное дифференцирующее звено, с
передаточной функцией (Тр+1).
Изображение и оригинал переходного процесса имеют вид
![]()
График переходного процесса приведен на рис.1.28.
В начале переходного процесса наблюдается скачок величиной k, а затем от него выходной сигнал изменяется по линейной зависимости.
В сравнении с другими интегрирующими звеньями изодромное звено имеет существенно меньший отрицательный фазовый сдвиг, что отчасти следует из эквивалентной структурной схемы звена, приведенной на рис.1.27в, в которую входит дифференцирующий блок (Тр+1). Значит, проблем с неустойчивостью САУ и другими плохими динамическими показателями, можно избежать.