

§ 11.4. Гидродинамические характеристики гребного винта
На выделенный
элемент лопасти, который обтекается со
скоростью υ под углом атаки
![]() (см. рис.38), действуют гидродинамические
силы. Результирующую этих сил обозначим
черезdF.
Проекция dF
на осевое направление есть сила упора
элемента лопасти dР,
а проекция на окружное направление -
сила сопротивления вращению элемента
лопасти dQ.
Момент сопротивления вращению элемента
(см. рис.38), действуют гидродинамические
силы. Результирующую этих сил обозначим
черезdF.
Проекция dF
на осевое направление есть сила упора
элемента лопасти dР,
а проекция на окружное направление -
сила сопротивления вращению элемента
лопасти dQ.
Момент сопротивления вращению элемента
лопасти: dМ = dQr, где r - радиус, на котором расположен рассматриваемый элемент лопасти.
Для всего винта
сила упора:
Р = z![]() ,
,
где z - число лопастей; r 0 - радиус ступицы; R – радиус винта.
Момент сопротивления вращению винта:
М = z![]() .
.
Этот момент равен по величине и противоположен по знаку вращающему моменту, который необходимо приложить к винту для обеспечения его вращения с заданной частотой n и создания требуемого упора Р.
Валовая мощность, потребная для равномерного вращения винта с угловой скоростью ω = 2πn,
Nр = М ω = 2πnМ.
Так как сила упора
создается в результате обтекания
лопастей потоком жидкости, то в
соответствии с общей формулой для
гидродинамических сил можно считать,
что величина сила Р пропорциональна
плотности жидкости, характерной площади
винта и квадрату характерной скорости.
Для винта в качестве характерной площади
принимают D2,
а в качестве характерной скорости –
nD.
Тогда, обозначив через
![]() 1
коэффициент
упора, для
силы упора получим следующую зависимость:
1
коэффициент
упора, для
силы упора получим следующую зависимость:
Р =
![]() ρn2
D4,
ρn2
D4,
откуда безразмерный коэффициент упора
![]() =
Р /ρn2
D4.
=
Р /ρn2
D4.
По аналогии момент
М =
![]() ρn2
D5,
ρn2
D5,
безразмерный коэффициент момента
![]() =
М /ρn2
D5.
=
М /ρn2
D5.
Коэффициент полезного действия гребного винта ηр, работающего в свободной воде (при отсутствии влияния корпуса судна и поверхности воды (ηк = 1)), определяется отношением полезной мощности к затраченной мощности:
ηр = Р υp/2πnМ,
или с учетом формул для упора и момента:
ηр
=![]() .
.
Упор, момент и
к.п.д. являются гидродинамическими
характеристиками гребного винта.
Величины их зависят от относительной
поступи винта λр
= υp/nD,
которая характеризует режим работы
гребного винта. График, выражающий
функциональную зависимость гидродинамических
характеристик винта
![]() ,
,![]() ,
и ηр
от относительной λр,
называется кривыми
действия винта
(рис.112).
,
и ηр
от относительной λр,
называется кривыми
действия винта
(рис.112).
П ри
отсутствии влияния корпуса, свободной
поверхности воды и кавитации винта
кривые действия будут одинаковыми для
геометрически подобных винтов, так как
λр
является при этих условиях критерием
динамическогоподобия винтов.
ри
отсутствии влияния корпуса, свободной
поверхности воды и кавитации винта
кривые действия будут одинаковыми для
геометрически подобных винтов, так как
λр
является при этих условиях критерием
динамическогоподобия винтов.
Рис.112. Кривые действия гребного
винта в свободной воде
§ 11.5. Работа гребного винта на разных режимах
Для оценки условий работы двигателей судна надо знать основные характеристики винта: упор Р, момент М и к.п.д. ηр на разных режимах, т.е. при любых значениях поступательной скорости υp и частоте вращения n (при разных значениях λр = υp/nD). Рассмотрим некоторые характерные режимы работы винта, условно заменив его одним эквивалентным элементом лопасти, расположенным на радиусе центра тяжести площади спрямленной поверхности лопасти (при r = 0,7R).
11.5.1. Швартовный
режим
(рис.113,а). Этот режим работы винта
наблюдается при снятии судна с мели,
движении в ледяных торосах. В швартовном
режиме υp
= 0 и λр
= υp/nD
= 0, т.е. винт работает на месте не совершая
полезной работы, КПД его ηр
= Р υp/2πnМ
= 0. Так как угол атаки
![]() для элемента
лопасти достигает наибольшей
для элемента
лопасти достигает наибольшей
в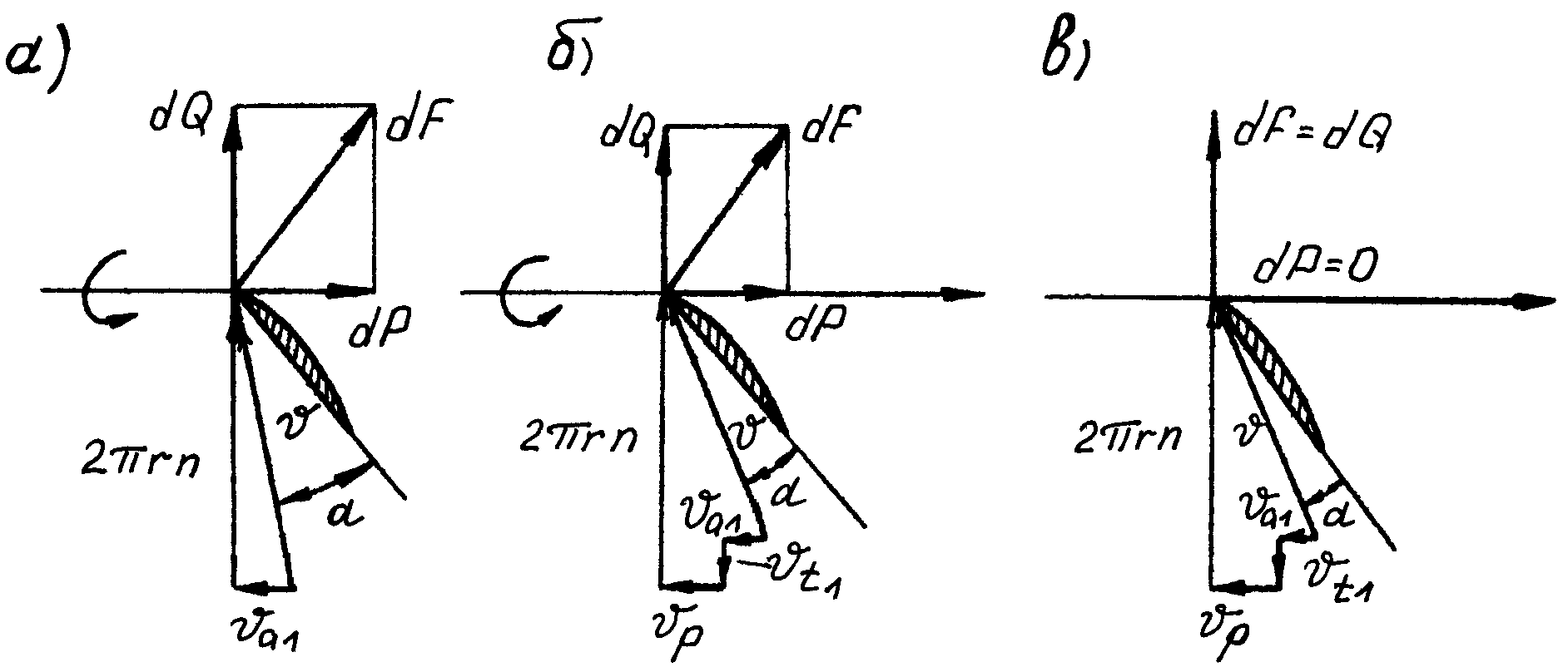 еличины,
упор винта Р и момент М (коэффициенты
еличины,
упор винта Р и момент М (коэффициенты![]() и
и
![]() )
оказываются наибольшими (рис.112). В этом
режиме работа винта с полной частотой
вращения недопустима из-за перегрузки
двигателей и опасности повреждения
валопроводов по причине больших осевых
усилий и крутящих моментов. Максимальная
частота вращения винта на швартовном
режиме составляет 60
)
оказываются наибольшими (рис.112). В этом
режиме работа винта с полной частотой
вращения недопустима из-за перегрузки
двигателей и опасности повреждения
валопроводов по причине больших осевых
усилий и крутящих моментов. Максимальная
частота вращения винта на швартовном
режиме составляет 60![]() 0,65%
частоты вращения расчетного режима
полного хода, т.е.nшв
< (0,60
0,65%
частоты вращения расчетного режима
полного хода, т.е.nшв
< (0,60![]() 0,65)nп.
0,65)nп.

Рис.113. Режимы работы элемента лопасти
11.5.2. Основной
(расчетный) режим переднего хода
(рис.113,б). Этот режим соответствует
относительной поступи λр
>0, при
которой винт создает полезный упор Р
(![]() >0)
за счет подведенного от двигателя
вращающего момента М (
>0)
за счет подведенного от двигателя
вращающего момента М (![]() >0),
причем КПД ηр
находится
в области максимальных для данного
винта значений (рис.112). Угол атаки
>0),
причем КПД ηр
находится
в области максимальных для данного
винта значений (рис.112). Угол атаки
![]() элемента
лопасти, коэффициенты
элемента
лопасти, коэффициенты
![]() и
и
![]() в рассматриваемом режиме меньше, чем в
швартовом режиме.
в рассматриваемом режиме меньше, чем в
швартовом режиме.
11.5.3. Режим нулевого
упора
(рис.113,в). С дальнейшим увеличением
относительной поступи угол атаки
![]() для элемента
лопасти продолжает уменьшаться, в в
связи с чем снижаются значения упора
для элемента
лопасти продолжает уменьшаться, в в
связи с чем снижаются значения упора
и
момента винта. При некотором λр
= λр1
упор Р (коэффициент упора![]() )
обращается в нуль и ηр
= Р υp/2πnМ
= 0, т.е. винт не совершает полезной работы
(рис.112). Момент М (коэффициент момента
)
обращается в нуль и ηр
= Р υp/2πnМ
= 0, т.е. винт не совершает полезной работы
(рис.112). Момент М (коэффициент момента![]() )
остается положительным, т.е. винт требует
подведения от двигателя некоторого
вращающего момента, который целиком
расходуется на преодоление сопротивления
вращению винта. Относительную поступь
λр1
принято обозначать называют Н1/D
и называть шаговым отношением нулевого
упора или гидродинамическим шаговым
отношением, а величину Н1
- шагом
нулевого упора или гидродинамическим
шагом. Шаговое отношение нулевого упора
Н1/D
превышает конструктивное Н/D,
и их численное соотношение специфично
для каждой серии гребных винтов. Режим
нулевого упора наблюдается при реверсе
винта и является кратковременным.
)
остается положительным, т.е. винт требует
подведения от двигателя некоторого
вращающего момента, который целиком
расходуется на преодоление сопротивления
вращению винта. Относительную поступь
λр1
принято обозначать называют Н1/D
и называть шаговым отношением нулевого
упора или гидродинамическим шаговым
отношением, а величину Н1
- шагом
нулевого упора или гидродинамическим
шагом. Шаговое отношение нулевого упора
Н1/D
превышает конструктивное Н/D,
и их численное соотношение специфично
для каждой серии гребных винтов. Режим
нулевого упора наблюдается при реверсе
винта и является кратковременным.
11.5.4. Режим нулевого
момента (рис.113,г).
При увеличении относительной поступи
за режимом нулевого упора при λр
= λр2
наступает режим нулевого момента винта,
когда коэффициент момента становится
равным нулю. Понятие КПД винта ηр
здесь не имеет смысла, так как к винту
от двигателя вращающий момент не
подводится. Винт вращается под действием
набегающего на него потока, а возникающий
при этом момент целиком расходуется на
преодоление сопротивления вращению
винта. Работающий
винт
оказывает набегающему потоку сопротивление,
которое соответствует отрицательному
значению упора Р (коэффициент упора![]() ).
Таким образом, в пределах относительной
поступи от λр
= λр1
до λр
= λр2
гребной винт уже не является движителем,
он как бы “парализован”
или находится в так называемой зоне
Параля (рис.112).
).
Таким образом, в пределах относительной
поступи от λр
= λр1
до λр
= λр2
гребной винт уже не является движителем,
он как бы “парализован”
или находится в так называемой зоне
Параля (рис.112).
Дальнейшее увеличение относительной поступи за предел λр2 приводит к тому, что не только упор Р, но и момент М оказываются отрицательными, т.е. гребной винт из движителя превращается гидротурбину (рис.113,д), что соответствует турбинному режиму работы винта.