

Способы реализации импульсных элементов (ключей).
Импульсные элементы (бесконтактные ключи) могут быть реализованы на базе тиристоров или силовых транзисторов, работающих в режиме переключения.
Тиристоры являются приборами с неполной управляемостью, поэтому для выключения тиристора, включенного на постоянное напряжение, необходимо использовать искусственную коммутацию, для чего в коммутирующем устройстве должен быть элемент, запасающий энергию в виде электрического или магнитного поля (емкость, или эл. магнитный элемент). Эта энергия используется для выключения тиристора, проводящего ток.
33 Вопрос Широтно- импульсные преобразователи для управления двигателями постоянного тока.
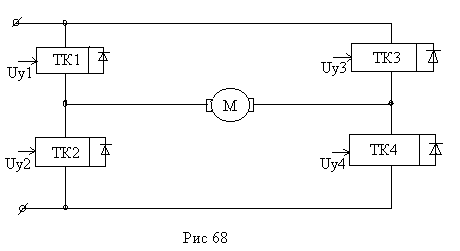
Упрощенная принципиальная схема широтно-импульсного преобразователя (ШИП) представлена на рис 68. Она содержит четыре ключа ТК1 - ТК4. В диагональ моста, образованного силовыми ключами, включена нагрузка.
Нагрузкой является якорь двигателя постоянного тока. Питание ШИП осуществляется от источника постоянного тока, например, неуправляемого выпрямителя.
Наиболее простым способом управления ШИП по цепи якоря является, так называемый, симметричный способ управления.
При этом способе в состоянии одновременного переключения находятся все четыре силовых ключа моста, а напряжение на выходе ШИП представляет собой знакопеременные импульсы, длительность которых регулируется входным сигналом.
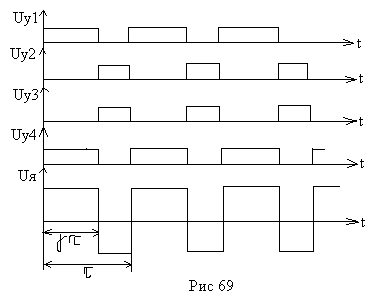
В ШИП с симметричным управлением среднее напряжение Uя на выходе ШИП равно нулю, когда относительная продолжительность включения 0 = 0.5. Временные диаграммы работы ШИП при симметричном способе управления приведены на рис 69. Симметричный способ управления обычно используется в маломощных электроприводах постоянного тока. Его преимуществом является простота реализации и отсутствие зоны нечувствительности в регулировочной характеристике. Недостатком ШИП с симметричным управлением является знакопеременное напряжение на нагрузке и в связи с этим повышенные пульсации тока в якоре двигателя.
Стремление исключить этот недостаток привело к разработке способов, обеспечивающих однополярное напряжение на выходе ШИП.
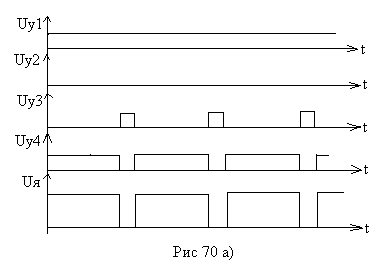
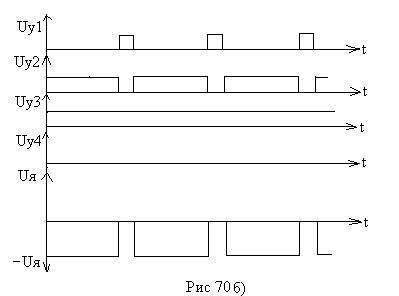
Простейшим из них является несимметричный. Несимметричное управление представлено на рис 70а) и 70б). В этом случае (рис 70а) переключаются силовые ключи ТК3 и ТК4 (ключи ТК1 и ТК2 при противоположной полярности входного сигнала), силовой ключ ТК1 постоянно открыт, а ключ ТК2 постоянно закрыт. Силовые ключи ТК3 и ТК4 переключаются в противофазе. При включенных ТК1 и ТК4 формируется напряжение, поступающее на якорь двигателя. Одновременное включение ТК1 и ТК3 необходимо при рекуперации энергии в сеть. Это происходит при включенных ТК1 и ТК4, когда Eдв >Un . Ток проходит по обратным диодам этих ключей. Когда же выключается ТК4 и включается ТК3, ток не прерывается, он течет по пути: -левая щетка двигателя М - обратный диод ключа ТК1- ключ ТК3 - правая щетка двигателя- якорь двигателя.
При работе в двигательном режиме на выходе ШИП формируются знакопостоянные импульсы и среднее напряжение на выходе равно нулю, когда относительная продолжительность включения ключа ТК4 = 0.
Недостатком рассмотренного способа управления является то, что загрузка ключей рабочим током неодинакова.
Этот недостаток устранен при поочередном управлении, временные диаграммы которого изображены на рис 71а) и 71б).
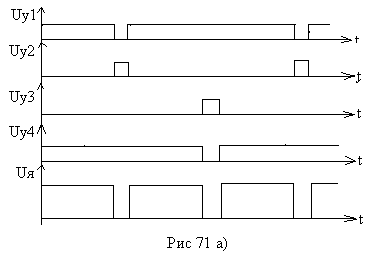

Здесь при любом знаке входного сигнала в состоянии переключения находятся все четыре силовых ключа моста, однако, частота переключения каждого из них в два раза меньше частоты напряжения на выходе.
Чем ниже частота переключения силовых ключей, тем ниже дополнительные потери мощности в них, т.е. пониженная частота переключения силовых элементов является достоинством ШИП.
Управляющее напряжение силовых ключей ТК1, ТК2 и ТК3, ТК4 постоянно находится в противофазе; при этом ключи переключаются через период выходного напряжения . Этим достигаются одинаковые условия работы полупроводниковых приборов в мостовой схеме.
При некотором знаке входного сигнала управляющие импульсы Uу1 и Uу4 длительностью t1 = (1+) подаются на диагонально расположенные ключи со сдвигом на полпериода (рис 71а), а управляющие импульсы Uу2 и Uу3 длительностью t2 = (1- ) также со сдвигом на полпериода подаются на силовые элементы противоположной диагонали (ТК2, ТК3). В этом случае на интервале нагрузка подключена к источнику питания с помощью диагонально расположенных ключей, а на интервале (1- ) нагрузка закорочена с помощью верхних или нижних ключей, если работа преобразователя происходит в инверторном режиме.
При изменении знака входного сигнала порядок управления диагональными ключами изменяется на противоположный (рис 71б). При поочередном управлении на нагрузке формируются знакопостоянные импульсы длительностью .