

22 Вопрос
22. Совместное управление комплектами реверсивных тп. Природа уравнительных токов.
Системы с совместным управлением подразделяются на два типа:
Системы с одноканальным управлением, или системы с жестким однозначным согласованием углов управления реверсивных групп 1 и 2;
Системы с двухканальным управлением, или системы с автоматическим регулированием уравнительного тока.
В одноканальных системах имеется лишь один канал управления, по которому осуществляется одновременное воздействие на углы управления обеих вентильных групп. При этом обеспечивается однозначное жесткое соответствие между углами управления 1 и 2 групп, т.е. каждому значению угла управления первой группы 1 соответствует строго определенное значение угла управления другой группы 2. Соотношение между углами 1 и 2 определяется принятым законом согласования, характеристиками системы управления и ее настройкой.
В двухканальных системах имеются два отдельных канала управления. Один из каналов воздействует на работающую группу вентилей и тем самым определяет основной режим работы электропривода. Второй канал управления воздействует на неработающую группу вентилей и служит для регулирования величины уравнительного тока. Поэтому двухканальные системы управления называют также системами с автоматическим регулированием уравнительного тока.
Из-за равенства средних значений ЭДС выпрямительной и инверторной групп при линейном (симметричном) согласовании постоянная составляющая выпрямленной ЭДС в уравнительном контуре равна нулю. Однако, сумма мгновенных значений ЭДС в этом контуре не равна нулю и вызывает протекание уравнительного тока. Последний имеет пульсирующий характер.
23 Вопрос
Согласование статических характеристик реверсивных групп
Линейное (симметричное) согласование.
На практике довольно часто применяется так называемое линейное или симметричное согласование работы реверсивных групп в соответствии с законом:
1 + 2 = 180
или 1 = 2 (3-38)
Здесь в соответствии с (3- 22) ЭДС выпрямительной группы равна ЭДС инверторной группы:
Ed в = Ed и
и постоянная составляющая выпрямленного напряжения в уравнительном контуре равна нулю.
Из-за наличия падения напряжения в вентилях напряжения холостого хода выпрямителя UdВ и инвертора UdИ при данном способе согласования оказываются уже неравными:
UdВ = Ed0 cos В - UВ < Ed0 cos и + UВ = UdИ (3- 39)
Вследствие этого скорость идеального холостого хода в двигательном режиме х.х.дв оказывается меньше скорости идеального холостого хода в режиме рекуперативного торможения х.х.т :
х.х.дв=UdВ / ce = (Ed0 cos В - UВ )/ce < (Ed0 cos и + UВ )/ce = UdИ / ce=х.х.т (3- 40)
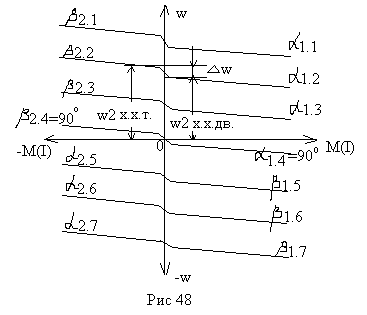
и механические характеристики привода имеют вид, показанный на рис 48:
Из рассмотрения этого рисунка и из соотношения (3-40) следует, что при изменении знака момента нагрузки электродвигатель начнет развивать тормозной момент лишь после того, как его скорость после предшествующего двигательного режима возрастет на величину .
= х.х.т - х.х.дв = 2UВ/ ce (3- 41)
Таким образом, при переходе из двигательного режима в режим рекуперативного торможения будет иметь место скачок скорости, т.е. при линейном согласовании не обеспечивается безлюфтовое сопряжение характеристик.
Величина изменения скорости, определяемая для электроприводов с разомкнутой системой управления выражением (3-41), прямо пропорциональна величине падения напряжения в вентилях.
Для тиристоров это падение напряжения составляет всего 1-2 вольта. Поэтому в реверсивном тиристорном электроприводе при линейном согласовании характеристик вентильных групп изменения скорости оказываются небольшими.
Т.е. данный способ обеспечивает согласование характеристик, близкое к безлюфтовому.
В реальных установках с конечной величиной индуктивности в цепи выпрямленного тока (Lнагр ) при очень малых моментах на валу благодаря наличию уравнительных токов через якорь двигателя протекает знакопеременный прерывистый ток, и изменение скорости происходит не резким скачком, а в некотором конечном интервале изменения момента. Этот интервал соответствует области прерывистого тока якоря. Действительная скорость идеального холостого хода х.х при этом определяется средним значением между х.х дв и х.х т .
В электроприводах с замкнутыми системами управления с обратной отрицательной связью по скорости и коэффициентом усиления, равным “к” изменение скорости при переходе из двигательного режима в тормозной будет в (1+к) раз меньше, т.е. для электропривода это изменение скорости будет совершенно незаметно.
Линейное согласование вентильных групп в соответствии с соотношением (3-38) не представляет больших технических трудностей при его практической реализации. Это является одним из его достоинств.