

3.5.4 Адаптивная дельта-модуляция
Многочисленные исследователи предложили и изучили большое число различных алгоритмов адаптации размера шага в дельта-модуляторе. В основном все алгоритмы увеличивают размер шага, когда устанавливается начало перегрузки по крутизне, и уменьшают размер шага при уменьшении крутизны входного сигнала. В некоторых из алгоритмов непосредственно изменяется крутизна входного сигнала и передается информация о размере шага в явной форме. В других алгоритмах информация о размере шага и в кодере и в декодере извлекается из передаваемого цифрового потока. Адаптация иногда является мгновенной, при которой подстройки осуществляются при переходе от одного дискрета к другому [16], но гораздо чаще – слоговой, при которой значительные изменения в размере шага происходят один раз на интервале длительностью примерно 10 мс. Оказалось, что все основные алгоритмы обеспечивают примерно одинаковое качество речи [19], но некоторые из них имеют определенные свойства, которые в ряде применений делают их более привлекательными, чем другие. В частности, эти алгоритмы отличаются по чувствительности к ошибкам в канале, формату передаваемых блоков, совместимости с другими видами кодеров и степени сложности цифровой обработки сигнала.
В этом разделе описывается один конкретный тип адаптивной дельта-модуляции, называемой, как правило, дельта-модуляцией с непрерывно изменяющейся крутизной (ДМНИК). Основной алгоритм кодирования при ДМНИК впервые был описан Грифкесом и де Ягером в 1968 г. [19]. Позднее Грифкес и Рименс [20, 30] предложили метод, который носит название дельта-модуляции с компандированием, управляемым цифровым способом. Здесь выбран именно этот тип адаптивной дельта-модуляции, поскольку он прост и имеет множество обычно желательных свойств. Кроме того, этот алгоритм реализован некоторыми фирмами в одной интегральной схеме.
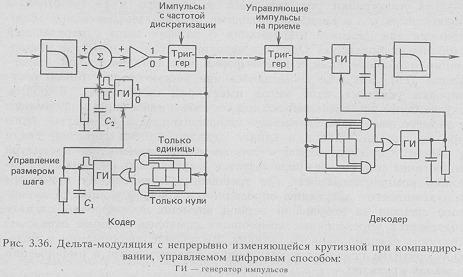
При компандировании, управляемом цифровым способом, как вытекает из названия, информация о размере шага получается из передаваемого цифрового потока. Как показано на рис. 3.36, логическое устройство адаптации следит за передаваемым цифровым сигналом, чтобы установить появление четырех последовательных единиц или четырех последовательных нулей (Число последовательных единиц или нулей, вызывающее увеличение размера шага, для дельта-модуляторов с пониженной скоростью передачи уменьшается до трех, чтобы оптимизировать время реакции). Последовательность из единиц показывает, что сигнал в цепи обратной связи, по-видимому, растет не столь быстро, как входной сигнал, в то время как последовательность нулей показывает, что сигнал в цепи обратной связи, по-видимому, падает не столь быстро, как входной сигнал. В обоих случаях все единицы или все нули свидетельствуют о том, что возникла перегрузка по крутизне и следовало бы увеличить размер шага. Вследствие этого оба сигнала – обо всех единицах и обо всех нулях –используются совместно для управления генератором импульсов. В течение перегрузки генератор импульсов возбуждается таким образом, чтобы напряжение шага, накапливаемое на конденсаторе C1, увеличивалось.
Система с ДМНИК, показанная на рис. 3.36, не осуществляет явных измерений для определения того, не слишком ли велик размер шага, который при этом следовало бы уменьшить. Вместо этого к конденсатору С1подключен резистор, что позволяет напряжению соответствующего шага со временем уменьшиться. В результате этого при отсутствии явных признаков увеличения напряжение шага автоматически уменьшается по экспоненте. В итоге размер шага уменьшается до минимального значения или до тех пор, пока не будет зафиксирована перегрузка, что снова приведет к увеличению размера шага.
Комбинацию из конденсатора и резистора называют иногда интегратором с утечкой, подразумевая под этим, что конденсатор интегрирует входные импульсы, а резистор обеспечивает утечку для уменьшения накопленного напряжения шага. Кроме автоматического уменьшения напряжения шага интегратор с утечкой устраняет также долговременный эффект влияния ошибок в канале на приемной стороне. Если бы использовался настоящий интегратор, ошибочное увеличение размера шага сохранялось бы бесконечно долго. Однако при интегрировании с утечкой длительность ошибочного увеличения (или отсутствия увеличения) ограничена несколькими постоянными времени интегратора с утечкой.
Отметим, что интеграция с утечкой используется также и для восстановления входного сигнала в декодере и соответственно в цепи обратной связи кодера. Благодаря этому смещение выходного сигнала в приемном полукомплекте, вызванное ошибкой в канале, естественным образом падает и эффективно устраняется за время, равное нескольким постоянным времени второго интегратора с утечкой. Устранение смещения в выходном сигнале не столь важно с точки зрения слушателя, поскольку постоянное смещение нельзя услышать, но зато полезно для предотвращения насыщения декодера. Если бы использовалось полное интегрирование, большое превышение числа положительных или отрицательных ошибок в конце концов привело бы к насыщению электронных схем в декодере и искажению формы речевого сигнала. В дополнение к этому интеграторы с утечкой обеспечивают компенсацию небольших различий размеров шагов в положительную и отрицательную стороны, что в противном случае также привело бы к насыщению.

На рис. 3.37 представлены характеристики двух ДМНИК-кодеков в зависимости от входного уровня испытательного синусоидального сигнала с частотой 1 кГц. Эти характеристики взяты из проспектов ДМНИК-кодеков типов МС3417 и МС3418 производства фирмы Motorola. Кодек, работающий со скоростью 16 кбит/с (МС3417), обеспечивает качество, которое называют общим качеством канала связи. Кодек, работающий со скоростью 37,7 кбит/с (МС3418), определяет качество телефонной связи общего пользования. Отметим, однако, что характеристики при скорости передачи 37,7 кбит/с не соответствуют требованиям к каналообразующему блоку типаD3, а именно к отношению сигнал-шум (ОСШК), равному 33 дБ в динамическом диапазоне 30 дБ. Напомним, что спецификация для блока типа D3 возникла из необходимости получения повышенного качества для обеспечения возможности многократных преобразований. Таким образом, хотя ДМНИК при скорости передачи 37,7 кбит/с дает приемлемое качество на соединении между двумя оконечными устройствами, для применений в случае нескольких последовательных операций кодирования скорость передачи следует увеличить. Кроме того, шумы незагруженного канала увеличиваются, если размеры шагов различаются.
Кривые на рис. 3.37 не полностью отражают качество выходного сигнала, если на вход подается речевой сигнал. Поскольку синусоидальный сигнал с частотой 1 кГц представляет собой неизменный входной сигнал, он не обеспечивает проверку адаптации в кодеке. В частности, обычно отмечают, что в адаптивных дельта-модуляторах в речевом сигнале на выходе возникает некоторая нечеткость. Эта нечеткость отмечается в начале слов и относительно сильных слогов, что вызывается временной перегрузкой по крутизне.
В заключение следует снова отметить, что к настоящему времени предложено и реализовано большое число разновидностей алгоритмов дельта-модуляции. Приведенный в качестве примера кодек ДМНИК является наиболее распространенным и дает представление о самых существенных чертах дельта-модуляции.