

Лабораторна робота № 6 дослідження імітаційної моделі адаптивного дельта кодека.
Мета роботи: вивчення принципів дії й характеристик адаптивного дельта кодека, зіставлення й аналіз характеристик макета й імітаційної моделі
Домашнє завдання: вивчіть принцип дії й схему включення кодера й декодера адаптивного дельта кодека, його основні характеристики.
1 Коротка теорія
1. Загальні відомості
Численні дослідники запропонували й вивчили велику кількість різних алгоритмів адаптації розміру кроку в дельта кодеку. В основному всі алгоритми збільшують розмір кроку, коли встановлюється початок перевантаження по крутості, і зменшують розмір кроку при зменшенні крутості вхідного сигналу. У деяких алгоритмах безпосередньо змінюється крутість вхідного сигналу й передається інформація про розмір кроку в явній формі. В інших алгоритмах інформація про розмір кроку й у кодері й у декодері випливає з переданого цифрового потоку. Адаптація іноді є миттєвою, при якій підстроювання здійснюються при переході від одного дискрету до іншого, але набагато частіше - складовою, при якій значні зміни в розмірі кроку відбуваються один раз на інтервалі тривалістю приблизно 10 мс.
Виявилося, що всі основні алгоритми забезпечують приблизно однакову якість мови, але деякі з них мають певні властивості, які в ряді застосувань роблять їх більш привабливими, чим інші. Зокрема, ці алгоритми відрізняються по чутливості до помилок у каналі, формату переданих блоків, сумісності з іншими видами кодерів і ступеня складності цифрової обробки сигналу.
У цій лабораторній роботі досліджується один конкретний тип адаптивної дельта-модуляції, що називають дельта-модуляцією з безупинно, мінливою крутістю (ДМБМК). Тут обраний саме цей тип адаптивної дельта-модуляції, оскільки він простий і має перелік звичайно бажаних властивостей. Крім того, цей алгоритм реалізований деякими фірмами в одній інтегральній схемі, зокрема він застосовується в телефонних станціях системи С-32.
При компандуванні, керованому цифровим способом, як випливає з назви, інформація про розмір кроку виходить із переданого цифрового потоку. Як показано на мал. 1, логічний пристрій адаптації стежить за переданим цифровим сигналом, щоб установити появу чотирьох послідовних одиниць або чотирьох послідовних нулів (число послідовних одиниць або нулів, що викликає збільшення розміру кроку, для дельта-модуляторів зі зниженою швидкістю передачі зменшується до трьох, щоб оптимізувати час реакції).

Рис.1.
Послідовність із одиниць показує, що сигнал у ланцюзі зворотного зв'язку, очевидно, росте не настільки швидко, як вхідний сигнал, у той час як послідовність нулів показує, що сигнал у ланцюзі зворотного зв'язку, очевидно, падає не настільки швидко, як вхідний сигнал. В обох випадках всі одиниці або всі нулі свідчать про те, що виникло перевантаження по крутості й варто було б збільшити розмір кроку. Внаслідок цього обидва сигнали – про всі одиниці й про всі нулі – використовуються спільно для управління генератором імпульсів. Протягом перевантаження генератор імпульсів збуджується таким чином, щоб напруга кроку на конденсаторі C1 збільшувалася.
Система із ДМБМК, показана на мал. 1, не здійснює явних вимірів для визначення того, чи не занадто великий розмір кроку, що при цьому варто було б зменшити. Замість цього до конденсатора С1 підключений резистор, що дозволяє напрузі відповідного кроку згодом зменшитися. У результаті цього при відсутності явних ознак збільшення напруга кроку автоматично зменшується по експоненті. У підсумку розмір кроку зменшується до мінімального значення або доти, поки не буде зафіксоване перевантаження, що знову призведе до збільшення розміру кроку.
Комбінацію з конденсатора й резистора називають іноді інтегратором з витоком, маючи на увазі під цим, що конденсатор інтегрує вхідні імпульси, а резистор забезпечує витік для зменшення накопиченої напруги кроку. Крім автоматичного зменшення напруги кроку інтегратор з витоком усуває також довгостроковий ефект впливу помилок у каналі на прийомній стороні. Якби використовувався справжній інтегратор, помилкове збільшення розміру кроку зберігалося б нескінченно довго. Однак при інтегруванні з витоком тривалість помилкового збільшення (або відсутності збільшення) обмежена кількома постійними часу інтегратора з витоком.
Відзначимо, що інтеграція з витоком використовується також і для відновлення вхідного сигналу в декодері й відповідно в ланцюзі зворотного зв'язку кодера. Завдяки цьому зсув вихідного сигналу в прийомному напівкомплекті, викликаний помилкою в каналі, природно падає й ефективно усувається за час, рівний декільком постійним часу другого інтегратора з витоком. Усунення зсуву у вихідному сигналі не настільки важливо з погляду слухача, оскільки постійний зсув не можна почути, проте корисно для запобігання насичення декодера. Якби використовувалося повне інтегрування, велике перевищення числа позитивних або негативних помилок зрештою призвело б до насичення електронних схем у декодері й перекручування форми мовного сигналу. На додаток до цього інтегратори з витоком забезпечують компенсацію невеликих розходжень розмірів кроків у позитивну й негативну сторони, що в противному випадку також привело б до насичення.
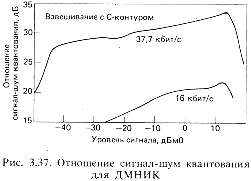
Рис.2.
На мал. 2 представлені характеристики двох ДМБМК-кодеків залежно від вхідного рівня іспитового синусоїдального сигналу із частотою 1 кГц. Ці характеристики взяті із проспектів ДМБМК-кодеків типу МС3417 і МС3418 виробництва фірми Motorola. Кодек, що працює зі швидкістю 16 кбіт/с (МС3417), забезпечує якість, що називають загальною якістю каналу зв'язку. Кодек, що працює зі швидкістю 37,7 кбіт/с (МС3418), визначає якість телефонного зв'язку загального користування. Відзначимо, однак, що характеристики при швидкості передачі 37,7 кбіт/с не відповідають вимогам до каналоутворюючого блоку типу D3, а саме до відношення сигнал-шум (ВСШК), рівному 33 дБ у динамічному діапазоні 30 дБ..
Таким чином, хоча ДМБМК при швидкості передачі 37,7 кбіт/с дає прийнятну якість на з'єднанні між двома кінцевими пристроями, для застосувань у випадку декількох послідовних операцій кодування, швидкість передачі варто збільшити. Крім того, шуми незавантаженого каналу збільшуються, якщо розміри кроків розрізняються.
Криві на мал. 2 не повністю відбивають якість вихідного сигналу, якщо на вхід подається мовний сигнал. Оскільки синусоїдальний сигнал із частотою 1 кГц являє собою незмінний вхідний сигнал, він не забезпечує перевірку адаптації в кодеку. Зокрема, звичайно відзначають, що в адаптивних дельта-модуляторах у мовному сигналі на виході виникає деяка нечіткість. Ця нечіткість відзначається на початку слів і щодо сильних складів, що викликається тимчасовим перевантаженням по крутості.
На закінчення слід знову зазначити, що до теперішнього часу запропоновано й реалізовано велику кількість різновидів алгоритмів дельта-модуляції. Досліджуваний у лабораторній роботі кодек ДМБМК є найпоширенішим і дає подання про самі істотні риси дельта-модуляції.
Параметри інтеграторів підбирають так, щоб однократне інтегрування давало східчасту інтерполяцію, а дворазове - лінійну інтерполяцію. Інтегрування дає наступний ефект: якщо символи на виході ДМ однієї полярності, то крок ДМ збільшується» якщо полярність символів, що чергується, то крок зменшується.
Такий принцип регулювання кроку цілком виправданий. Якщо символи однакові, це значить, що абсолютна величина вхідного сигналу збільшується. Природно в цьому випадку збільшити крок дельта-модуляції. Якщо символи чергуються, то це свідчить про малі зміни сигналу між відліками, зокрема, це може бути й для постійного рівня сигналу. У цьому випадку крок треба зменшувати. Системи, у яких є ДМ із подвійним і частково подвійним інтегруванням, звичайно призначалися для передачі мовних сигналів.
З тою ж метою в дельта кодеках з підвищеною інформативністю застосовують інші алгоритми, у яких при регулюванні кроку подібним чином ураховується структура бінарної вихідної послідовності символів. Якщо в цій послідовності є кілька символів одного знаку, то крок ДМ збільшують, помножуючи його попереднє значення на коефіцієнт, більший одиниці. Якщо символи різних знаків, то крок зменшують множенням на коефіцієнт менше одиниці. У різних алгоритмах різні коефіцієнти, різне число використовуваних для аналізу попередніх відліків, але суть та сама, що й у перших дельта-модуляторах з подвійним і частково подвійним інтегруванням.
Число символів у послідовності, по яких провадиться аналіз змін сигналу, визначає затримку при передачі. Найменша з одного часового інтервалу в алгоритмі з однобітною пам'яттю, де враховуються всього два символи вихідної послідовності, з них один ставиться до попереднього відліку, а інший – до поточного. Правило регулювання кроку представлено співвідношенням:
![]()
де хi=1, якщо i-й символ 1, і хi=-1, якщо i-й символ 0. Індекс указує момент дискретизації; параметри α,β - постійні, що обираються з умови стійкості: 1, 1, 0l.
Незважаючи на те, що даний алгоритм ураховує, крім попереднього, і знак поточного відліку, описувана система є типовою системою із прогнозом: установлюване значення кроку ставиться не тільки на теперішній момент, але в той же час задає новий нульовий рівень відліку для наступного моменту часу.
Для системи, називаною дельта-модуляцією з підвищеною інформативністю (ДМПІ), правило регулювання утворюється, якщо припустити (β=2, α==l/2, а індекси в Хi, Хi-1 зменшити на одиницю). Якщо два попередні символи однакові, то в наступний момент крок подвоюється, якщо різні, то зменшується вдвічі. Це дозволяє стежити за експонентним ростом абсолютної величини вхідного сигналу й у порівнянні зі звичайною ДМ зменшує помилки перевантаження в тих випадках, коли має місце такий ріст. При малих змінах вхідного сигналу крок ДМ досить швидко зменшується, зменшуючи помилки дроблення.