

MB_Shtanko_Teormex_2013_old
.pdf
|
|
|
|
|
|
|
|
|
|
|
ТЕОРЕТИЧНА МЕХАНІКА |
||
|
Продовження таблиці 1.1 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ |
|
|
|
|
Вид в’язі |
Найменування |
Напрямок дії і реакції |
||||||
з/ч |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
||||
|
|
|
|
|
|
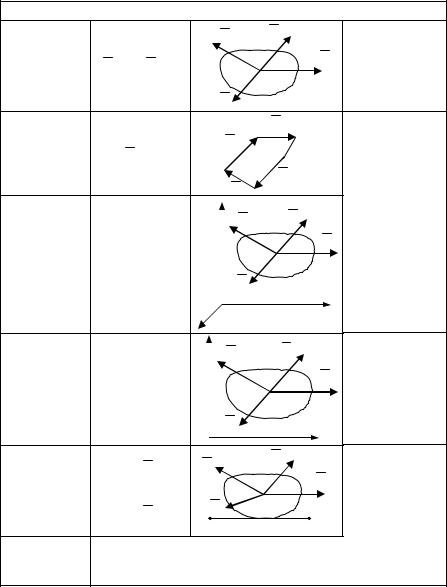
Реакцію RA |
|||||||
|
YA |
|
Шарнірно |
||||||||||
|
|
|
|
|
|
|
|||||||
3. |
|
|
|
|
P |
розділяють на дві |
|||||||
|
|
|
α |
нерухома опора |
|||||||||
|
|
|
|
|
|
|
|
x |
складові – проекції |
||||
|
|
A |
|
|
|
|
|
|
на осі координат х і y |
||||
|
|
|
|
|
|
|
|
|
|
|
|
||
X A
RA |
P |
|
|
|
|
||
4. |
Шарнір |
Перпендикулярно до |
|
на рухомій опорі |
опорної поверхні |
||
A |
|||
90° |
|
||
RA |
P |
|
|
|
|
5. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Шарнірно |
Перпендикулярна |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
рухома опора |
до опорної поверхні |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
A |
|
|
90° |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
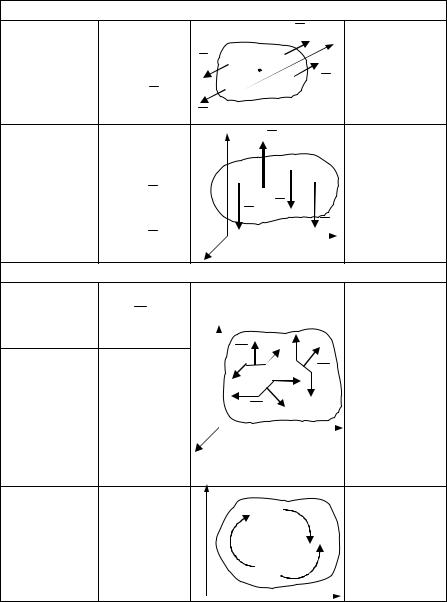
Дві взаємно |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
YA |
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
перпендикулярні |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Жорстке |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6. |
|
|
|
|
|
MA |
|
|
|
|
|
|
|
складові X A і YA |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
защемлення |
||||||||||||||||||
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
та реактивний |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
момент МА |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
A |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
Перпендикулярно |
|||||||||||
|
|
|
|
|
|
R |
A |
|
|
|
|
|
|
|
Ковзне |
|||||||||||||||
7. |
|
|
|
|
|
|
A 90° |
|
|
MA |
|
|
опорній поверхні. |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
x |
защемлення |
Реактивний момент |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МА у площині хy |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
P
11
1 |
СТАТИКА |
|
|
|
|
|
|
Продовження таблиці 1.1 |
|
|
|||
№ |
|
Вид в’язі |
Найменування |
Напрямок дії і реакції |
||
з/ч |
|
|||||
|
|
|
|
|
||
8. |
S3 |
|
F |
Жорсткий |
Вздовж |
|
|
|
|
|
невагомий |
||
|
|
|
|
осі стержня |
||
|
|
|
S2 |
S1 |
стержень |
|
|
|
|
|
|||
|
|
|
|
|
||
|
|
y |
MA |
|
|
|
|
A |
|
|
Реактивний момент |
||
9. |
|
|
Рухоме |
|||
|
|
|
x |
затискання |
МА |
|
|
|
|
|
|||
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
A |
T |
|
Гнучка |
|
|
|
|
|
M |
|
||
10. |
|
|
Вздовж нитки |
|||
|
|
нерозтяжна |
||||
|
|
|
до точки підвісу |
|||
|
|
|
|
|
нитка |
|
|
|
|
|
|
|
|
|
|
z |
|
P |
|
|
|
|
Rz |
R |
|
|
|
|
|
|
|
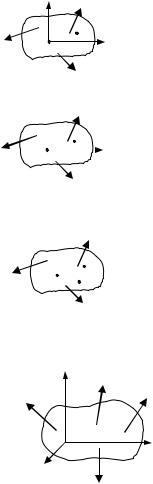
Загальну реакцію R |
||
|
|
|
|
|
||
|
|
|
|
y |
|
|
11. |
|
|
Сферичний |
розкладають |
||
|
|
Ry |
шарнір |
на складові |
||
|
|
|
|
|||
|
|
|
|
|
Rx , Ry , Rz |
|
|
|
Rx |
|
|
|
|
|
x |
z |
|
|
|
|
|
|
|
|
|
Загальні реакції RA і |
|
|
X B |
B |
YB |
|
||
|
ZA |
Підпятник А та |
RB розкладають |
|||
12. |
|
y |
||||
|
|
|
A |
YA |
підшипник В |
на складові X A , YA , |
|
|
|
|
Z A та X B , YB |
||
|
x |
|
X A |
|
|
|
|
|
|
|
|
||
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТЕОРЕТИЧНА МЕХАНІКА |
||||||
Продовження таблиці 1.1 |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
№ |
Вид в’язі |
|
|
|
|
Найменування |
Напрямок дії і реакції |
|||||||||||||
з/ч |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
z |
|
|
|
|
|
|
|
|
|
|
|
Реакцію защемлення |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
розділяють на три |
||||||
ZA |
Mz |
|
|
|
|
|
Q2 |
|
||||||||||||
|
|
a |
|
складові сили |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
|
|
|
|||
|
|
|
|
α |
Жорстке |
|
A , YA , ZA , |
|||||||||||||
Mx |
A |
|
|
|
с |
|
b |
|
просторове |
спрямовані вздовж |
||||||||||
|
|
|
|
|
|
|
y |
защемлення |
осей, та три реактивні |
|||||||||||
13. |
|
|
My |
YA |
|
|
|
|
|
моменти Мх, Мy, Мz |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
відносно осей |
||||||||
x |
X |
A |
|
|
|
|
Q1 |
|
координат х, y, z |
|||||||||||
|
z |
|
|
|
|
|
|
ZA |
|
|
|
Реакцію розділяють |
|
|
|
YA |
y |
Сферичний |
на три складові |
|
|
|
|
|
X A , YA , ZA , |
||
14. |
A |
|
|
нерухомий |
||
X A |
|
|
шарнір А |
спрямованi вздовж |
||
|
|
|
|
осей координат х, y, z |
||
x |
|
|
|
|
||
|
P |
|
|
|
||
|
|
|
|
|
||
R |
N |
|
|
|
Реакція тертя |
|
|
|
Q |
|
|
||
|
x |
|
ковзання направлена |
|||
|
A |
|
||||
Fтр |
|
|
в бік, протилежний |
|||
|
|
|
|
напряму руху тіла і |
||
|
P |
|
|
|
має максимальне |
|
15. |
N |
Fтр |
Шорстка |
значення |
||
поверхня |
Fтр.max f N , |
|||||
|
||||||
|
|
|
|
|
||
|
|
A |
|
де f – коефіцієнт |
|
|
|
|
|
|
|
|
|
|
|
|
тертя ковзання; |
|
|
|
|
N – нормальна реакція |
|
x |
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|||
|
|
|
|
13 |
|
1 СТАТИКА
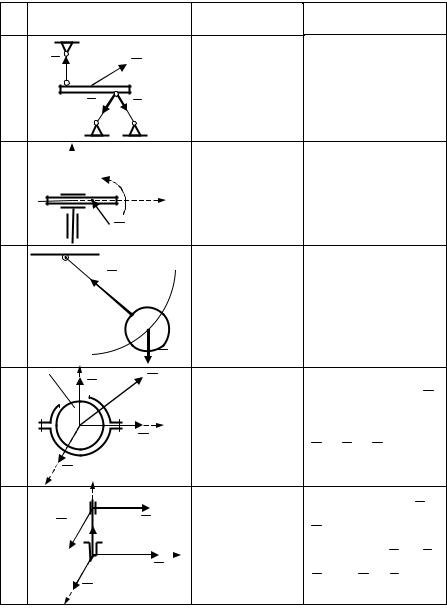
1.3 Проекція сили на вісь та площину
Таблиця 1.2
1 |
|
|
|
|
|
|
|
|
|
|
|
ПРОЕКЦІЯ СИЛИ НА ВІСЬ |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Проекція |
|
|
Fy |
|
|
|
F |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
Fx=F·cos ; |
сили на |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вісь є |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fy=F·sin |
|||||
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
величина |
|||||
|
|
|
А |
|
|
|
|
|
|
|
|
|
алгебраїчна |
|||||||
|
|
|
|
|
|
|
|
|
|
|
Fx |
|
|
x |
|
|
|
|
|
|
O |
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
b |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2 |
|
|
|
|
|
|
|
|
|
|
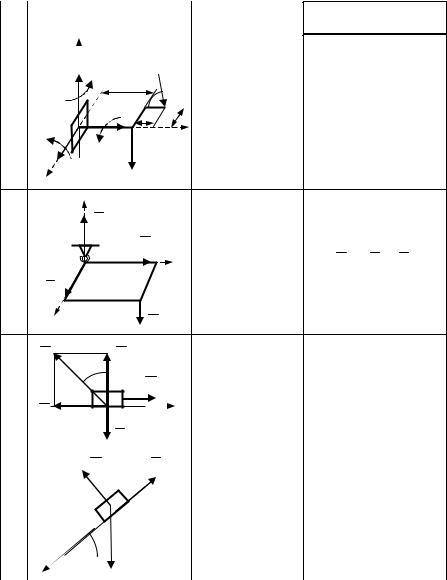
ПРОЕКЦІЯ СИЛИ НА ПЛОЩИНУ; |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
B |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
F |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xy |
|
1 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
OB |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
Проекція |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сили на |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fx=Fxy·cos =F·cos ·cos ; площину є |
||||||
|
|
|
|
|
Fy |
|
|
y |
||||||||||||
|
|
O |
|
|
|
|
Fy=Fxy·sin =F·cos ·sin |
величина |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
векторна |
|||||||
Fxy
Fx
x |
В1 |
14 |
|

ТЕОРЕТИЧНА МЕХАНІКА
1.4 Моменти сил
Таблиця 1.3
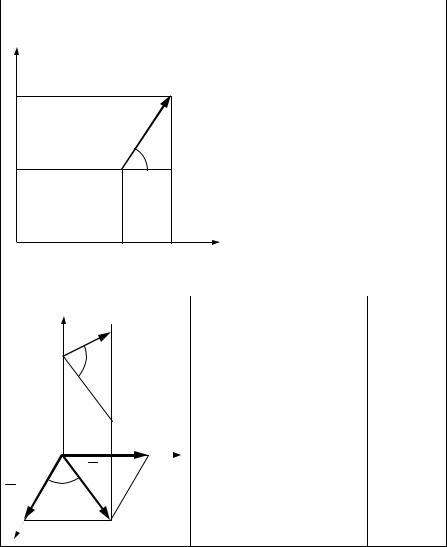
МОМЕНТ СИЛИ ВІДНОСНО ТОЧКИ
1Векторний момент сили F відносно точки О
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
O |
|
|
|
|
|
|
|
M |
F |
r |
F |
|
|
|
|
||||||||||
|
M |
F |
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
приклада- |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
Векторний момент MO F |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
ється у точці О і спрямовується пер- |
||||||||||||||||||
|
|
|
|
|
|
|
F |
|
пендикулярно до площини, яка прохо- |
||||||||||||||||||
|
|
|
|
|
|
A |
дить через силу і точку О в той бік, |
||||||||||||||||||||
|
|
|
|
|
|
звідки сила намагається повертати тіло |
|||||||||||||||||||||
|
O |
|
|
r |
|||||||||||||||||||||||
|
|
h |
|
|
|
проти ходу годинникової стрілки. |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
2 Алгебраїчний момент сили |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
F |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
відносно точки О |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
MO |
|
F h , |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
F |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
де h – плече сили (найкоротша від- |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
стань від точки до лінії дії сили). |
||||||||||||||||||
|
|
|
|
|
|
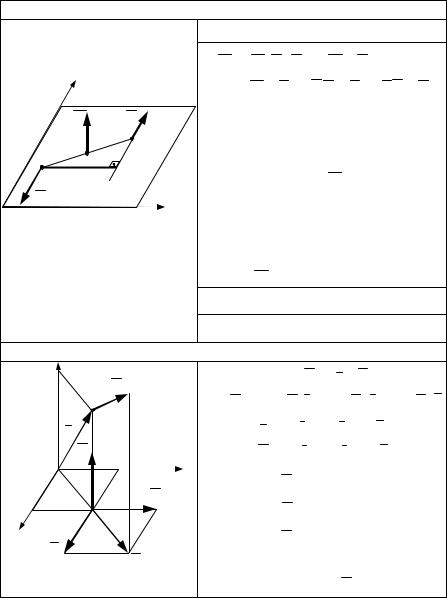
МОМЕНТ СИЛИ ВІДНОСНО ОСІ |
|
|
|
|
|
||||||||||||||||
F В
z
А
 B'
B'
Fxy
O |
h |
A' |
|
xy |
C |
||
|
1Момент сили F відносно осі
–це алгебраїчний момент проекції
сили F на площину хy, перпендикулярну до цієї осі відносно точки
перетину осі з площиною хy
Mz F MO Fxy Fxy h
F cos h
2Момент сили F відносно осі дорівнює нулю у двох випадках:
лінія дії сили перетинає вісь;
сила паралельна до осі.
15
1 |
СТАТИКА |
|
|
|
|
|
|
|
|
|
|
|
Продовження таблиці 1.3 |
|
|
|
|
|
|
|
|||
|
|
|
|
ПАРА СИЛ І ЇЇ МОМЕНТ |
|
|
|
|
|||
|
|
|
|
|
1 Векторний момент пари сил |
|
|||||
|
y |
|
|
|
M M F , F M A F |
|
|||||
|
|
|
|
M B F AB F BA F |
|
||||||
|
|
|
|
|
|
||||||
|
|
M |
|
F |
Модуль |
векторного |
моменту |
М |
|||
|
|
K |
|
В |
дорівнює |
|
|
М=F·d. |
|
||
|
А |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||
|
d |
|
|
|
|
|
|
|
|
|
|
|
F |
|
x |
Векторний момент M пари сил спря- |
|||||||
|
|
|
мовується перпендикулярно до пло- |
||||||||
|
|
|
|
|
щини дії пари сил так, щоб з кінця |
||||||
|
|
|
|
|
цього вектора можна було спостері- |
||||||
|
|
|
|
|
гати намагання пари сил обертати ті- |
||||||
|
|
|
|
|
ло проти ходу годинникової стрілки. |
||||||
|
|
|
|
|
Вектор M є вільним вектором. |
|
|||||
|
|
|
|
|
2 Алгебраїчний момент пари сил |
|
|||||
|
|
|
|
|
|
|
М=±F·d. |
|
|||
|
|
МОМЕНТИ СИЛИ ВІДНОСНО ОСЕЙ КООРДИНАТ |
|
||||||||
|
z |
|
F |
|
|
|
mO F r F |
|
|||
|
|
|
|
|
|
|
|||||
|
z |
|
А |
|
mO F mx F |
i my F j mz F k |
|||||
|
|
|
r x i y j z k |
|
|||||||
|
r |
|
|
|
|
||||||
|
|
Fz |
y |
y |
F F i F |
y |
j F k |
|
|||
|
О |
|
|
|
x |
z |
|
||||
|
|
|
|
mx F yFz |
zFy |
|
|||||
|
x |
|
|
Fy |
|
||||||
|
|
|
|
my F zFx |
|
|
|||||
|
|
|
|
|
xFz , |
|
|||||
x |
|
|
|
|
m |
|
F xF |
|
|
|
|
|
|
|
|
z |
|
yF |
|
||||
|
Fx |
|
|
Fxy |
|
|
y |
x |
|
||
|
|
|
де x, y, z – координати точки А; |
|
|||||||
|
|
|
|
|
|||||||
|
|
|
|
|
Fx, Fy, Fz – проекції F на осі x, y, z |
||||||
16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТЕОРЕТИЧНА МЕХАНІКА |
|
1.5 Умови рівноваги різних систем сил |
|
||||||
Таблиця 1.4 |
|
|
|
|
|
|
|
|
СИСТЕМА ЗБІЖНИХ СИЛ |
|
|
|
|||
|
|
|
F |
F2 |
|
|
|
1. Векторна |
n |
|
1 |
|
|
|
Рівнодійна |
|
|
|
|
F |
|||
|
|
|
|
система збіжних |
|||
умова |
R Fi 0 |
|
|
O |
|
3 |
сил дорівнює |
рівноваги |
i1 |
|
|
|
|
нулю |
|
|
|
|
Fn |
… |
|
|
|
|
|
|
|
|
|
||
2. Геометрична |
|
|
F2 |
F3 |
|
|
Силовий |
|
|
… |
|
||||
R 0 |
|
|
багатокутник при |
||||
умова |
|
|
|||||
|
|
|
|
|
рівновазі системи |
||
рівноваги |
|
|
|
Fn |
|
|
сил є замкнутим |
|
|
|
F1 |
|
|
||
|
n |
z |
|
|
|
|
|
|
F |
F2 |
|
|
|||
|
Fix 0 |
|
|
|
|||
3. Аналітичні |
i1 |
|
1 |
|
|
F3 |
|
|
|
|
|
|
|||
умови |
|
|
|
|
|
||
n |
|
|
|
|
|
||
рівноваги |
Fiy 0 |
|
|
О |
|
|
Осі координат |
просторової |
|
|
|
|
вибрані довільно |
||
i1 |
|
Fn |
… |
|
|
||
системи |
|
|
y |
|
|||
збіжних сил |
n |
|
|
|
|
|
|
Fiz 0 |
x |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
i1 |
y |
|
|
|
|
|
4. Аналітичні |
n |
F |
F2 |
|
|
|
|
|
|
|
|
||||
умови |
Fix 0 |
|
1 |
|
|
|
|
|
|
|
|
F |
Осі координат |
||
рівноваги |
i1 |
|
|
|
|
||
|
|
|
|
3 |
вибрані довільно |
||
плоскої сис- |
n |
|
|
О |
|
|
|
|
|
|
|
у площині дії сил |
|||
теми |
Fiy 0 |
|
Fn |
… |
|
|
|
збіжних сил |
i1 |
|
|
x |
|
||
|
|
|
|
|
|
|
|
5. Рівняння |
n |
|
|
F2 |
|
|
Точки Ві Сне |
M B Fix 0 |
F1 |
|
|
|
|||
моментів |
|
|
|
F3 |
лежать на одній |
||
i1 |
|
|
|
|
прямiй з точкою |
||
для плоскої |
|
|
O |
|
|||
системи |
n |
Fn |
… |
О, в якій перети- |
|||
збіжних сил |
MC Fiy 0 |
|
наються лінії дії |
||||
|
i1 |
B |
|
|
C |
|
сил |
6. Теорема про |
Якщо вільне тверде тіло знаходиться в рівновазі під дією |
||||||
три непаратрьох непаралельних сил, що лежать в одній площині, то |
|||||||
лельні сили |
лінії дії цих сил перетинаються в одній точцi. |
||||||
|
|
|
|
|
|
|
17 |
1 |
СТАТИКА |
|
|
|
|
|
|
|
Продовження таблиці 1.4 |
|
|
|
|
|
|
|
|
ПАРАЛЕЛЬНІ СИЛИ |
|
|
|||
7. |
Аналітичні |
n |
|
|
F2 |
x |
Точка Овибрана |
|
умови |
Fix 0 |
F1 |
O |
|
|
довільно у |
|
рівноваги |
i1 |
|
Fn |
площині дії сил, а |
||
|
плоскої сис- |
n |
|
|
|
вісь х– паралель- |
|
|
теми пара- |
MO Fi 0 |
|
|
… |
|
на до лінії дії цих |
|
лельних сил |
i1 |
F3 |
|
|
сил |
|
|
|
|
|
||||
|
|
n |
|
z |
F2 |
|
|
8. |
Аналітичні |
Fiz 0 |
|
|
|
||
|
|
An |
|
|
|||
|
умови |
i1 |
|
A1 |
A3 |
Вісь Oz пара- |
|
|
рівноваги |
n |
|
||||
|
просторової |
M x Fi 0 |
|
F1 |
A2 |
|
лельна до лінії |
|
системи па- |
i1 |
|
Fn |
|
дії сил |
|
|
ралельних |
n |
|
|
|
F3 |
|
|
|
|
|
|
|
||
|
сил |
M y Fi 0 |
x |
|
|
y |
|
|
|
i1 |
|
|
|
||
|
|
|
|
|
|
||
|
|
|
ПАРА СИЛ |
|
|
|
|
9. |
Векторна |
n |
|
|
|
|
|
|
умова |
Mi 0 |
z |
|
|
|
|
|
рівноваги |
i1 |
|
|
|
|
|
|
|
n |
|
M1 |
|
|
|
10. Аналітичні |
Mix 0 |
|
|
|
M2 |
Осі координат |
|
i1 |
|
|
|
|
вибрані довільно |
||
|
умови |
|
|
|
|
||
|
n |
|
M3 |
|
|
||
|
рівноваги |
|
|
|
|||
|
Miy 0 |
|
|
|
|||
|
просторової |
x |
|
|
|
|
|
|
i1 |
|
|
y |
|||
|
системи пар |
|
|
||||
|
сил |
n |
|
|
|
|
|
|
Miz 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i1 |
y |
|
|
|
|
11. Аналітичні |
|
|
|
|
|
||
|
|
|
M2 |
|
|
||
|
умови |
n |
|
|
|
Осі координат |
|
|
рівноваги |
Mi 0 |
|
M1 |
|
лежать у площині |
|
|
плоскої сис- |
|
|
||||
|
i1 |
|
|
M3 |
|
дії пар сил |
|
|
теми пар |
|
|
|
|||
|
|
|
|
|
|||
|
сил |
|
O |
|
|
|
x |
|
|
|
|
|
|
||
18 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТЕОРЕТИЧНА МЕХАНІКА |
|||||||||
Продовження таблиці 1.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
ДОВІЛЬНА ПЛОСКА СИСТЕМА СИЛ |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
F2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
Fix |
0 ; Fiy |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Осі координат і |
||||||||||||||||||||||||||||||
|
|
F1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
12. І форма |
i 1 |
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
O |
x |
точка Овибрані у |
||||||||||||||||||||||||||||||
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
M O |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
O1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
площині дії сил |
|||||||||||||||||||||||
|
Fi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fn |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Fix 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Точки А, В і вісь х |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F2 |
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
взяті у площині дії |
||||||||||||||||||
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
13. ІІ форма |
M A |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
A |
x |
сил, причому |
||||||||||||||||||||||||||||||||||
Fi |
|
|
|
|
|
B |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пряма АВ не |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
перпендикулярна |
||||||||||
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fn |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
M B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
до осі х |
|
|||||||||||||||||||||||||||||||
|
Fi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
M A |
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
Fi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F2 |
|
Точки А, В, С |
||||||||||||||||||||||||||||||||
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
знаходяться у |
||||||||||
14. ІІІ форма |
|
M |
B |
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
i 1 |
|
F 0 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
площині дії сил і |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
не лежать на одній |
|||||||||
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fn |
|
|
|
|
прямій |
|
||||||||||||||||||
|
M C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
Fi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
ДОВІЛЬНА ПРОСТОРОВА СИСТЕМА СИЛ |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Fix 0 ; Fiy 0 |
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
15. Аналітичні |
|
|
|
|
|
|
|
|
|
|
|
|
F2 |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
F3 |
|
|
||||||||||||||||||||||||||||||||||||||||||
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
F1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
умови |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Осі |
|||||||||||||
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
рівноваги |
Fiz |
0 |
; M x |
|
|
0 |
|
|
|
A1 A2 |
|
|
|
|
|
|
|
|
|
координат |
||||||||||||||||||||||||||||||||||||
Fi |
|
|
|
|
|
A3 |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
довільної |
i 1 |
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
проведені |
||||||||||||
просторо- |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
An |
|
|
|
y |
|
довільно |
||||||||
вої систе- |
M y |
|
|
0 ; M z |
|
0 |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
Fi |
Fi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||
ми сил |
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fn |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
Для рівноваги довільної системи сил |
|||||||||||||||||||||||||||||||||||||||
16. Векторні |
|
|
|
|
R |
Fi |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
необхідно і достатньо, щоб головний |
||||||||||||||||||||||||||||||||||
умови |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
n |
|
|
0 |
|
|
|
|
|
|
вектор і головний момент |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
рівноваги |
|
|
O |
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
M |
M |
Fi |
|
|
|
|
|
|
дорівнювали нулю |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
19
1 СТАТИКА
1.6 Визначення центра ваги плоскої фігури
Найбільш вживаним способом визначення центра ваги плоскої фігури є уявний поділ однорідного твердого тіла на скінчене число частин, положення центра ваги кожної із яких відомо, або легко може бути визначено.
Для однорідної пластини розміщеної у площині Oxy центр ваги визначаємо за формулами
|
1 |
n |
|
1 |
n |
|
|
XC |
Sk хk ; |
YC |
Sk yk , |
(1.2) |
|||
|
|
||||||
|
S k 1 |
|
S k 1 |
|
|||
де S – площа всієї пластини; Sk – площі її частин;
xk, yk – координати центрів ваги виділених частин.
Якщо однорідне тіло має площину, вісь або центр симетрії, то його центр ваги лежить відповідно в площині симетрії, на осі симетрії, або в центрі симетрії.
Центр ваги пластини, яка має вирізи, визначаємо за методом до-
повнення. Для знаходження координат XC, YC доповнюємо площу пластини до повної, а потім віднімаємо із отриманої площі площу вирізаної частини. При цьому площа частини, яка віднімається, повинна братися із знаком мінус.
Для полегшення виконання завдання наведемо центри ваги деяких однорідних фігур (таблиця 1.5).
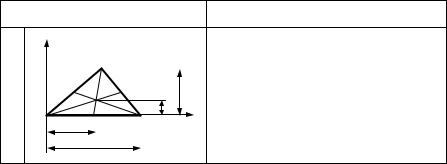
Площа трикутника
Таблиця 1.5
Фігура |
Координати центра ваги |
y |
|
B |
|
|
|
y |
1 |
h ; |
|
X |
C |
|
1 |
x |
x |
2 |
x , |
||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
C |
3 |
a |
|
|
|
|
3 |
1 |
|
3 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
C |
yC |
hа x |
де x1, x2, x3 – координати вершин О, |
|||||||||||||||
O xC |
|
|
|
А, В. |
|
|
|
|
|
1 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
a |
A |
|
|
|
|
|
S |
|
|
a h |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
a |
|
|
|
|||
20