

MB_Shtanko_Teormex_2013_old
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТЕОРЕТИЧНА МЕХАНІКА |
||||||||||
|
|
|
|
|
|
3.5 Принципи механіки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Принцип Даламбера |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
для точки |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
для системи |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ін 0 |
|
|
|
|
|
|
|
|
|
|
e |
|
|
ін 0 ; |
|
|
|
0e |
|
0ін 0 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
R |
F |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
R |
M |
M |
|||||||||||||||||||||||||||||||||
|
Якщо у будь-який момент часу до сил |
У кожий момент часу сума головних |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
F і R , |
які діють на точку, додати |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
векторів |
|
|
|
|
і головних моментів |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
силу інерції |
|
ін |
|
|
|
|
|
|
|
зовнішніх |
сил і сил інерції рухомої |
|||||||||||||||||||||||||||||||||||||||||||||
F |
точки, то отримана |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
система сил буде зрівноважена. |
|
|
|
|
|
матеріальної системи дорівнює нулю. |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
Головний вектор і головний момент сил інерції твердого тіла |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
поступальний рух |
обертальний рух відносно осі zC |
|
|
|
|
плоский рух |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
ін MaC ; |
|
|
|
|
|
|
|
ін 0 ; |
|
|
|
|
|
|
|
|
|
|
|
|
ін MaC ; |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
R |
|
|
|
R |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0ін 0 |
|
|
|
|
|
|
0ін IzC |
|
|
|
|
|
|
|
|
|
|
0ін IzC |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Принцип можливих переміщень |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для рівноваги механічної систем из ідеальними |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
стаціонарними і утримуючими в’язями необхідно і |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
достатньо, щоб сума елементарних робіт усіх актив- |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
Aka 0 |
них сил, прикладених до точок системи, |
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
k 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
дорівнювала нулю на будь-якому можливому |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
переміщенні системи, якщо швидкості точок систе- |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ми в даний момент часу дорівнюють нулю. |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Загальне рівняння динаміки |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
Під час руху систем из ідеальними в’язями в кожний |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
даний момент часу сума елементарних робіт всіх при- |
||||||||||||||||||||||||||||||||||||||||
|
Aka Akін 0 |
кладених активних сил і всіх сил інерції на будь- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
k 1 |
|
|
|
|
|
|
|
|
|
k 1 |
|
|
|
якому можливому переміщенні системи дорівнює ну- |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
лю |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рівнння Лагранжа другого роду |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
Загальний випадок |
|
|
|
|
|
|
|
Випадок потенціальних сил |
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
d |
|
|
|
T |
|
|
|
|
T |
|
|
|
|
|
d |
|
L |
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
Q1 ; |
|
|
|
|
|
|
|
Q1 ; L T П ; |
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
q |
q |
|
dt |
q |
q |
||||||||||||||||||||||||||||||||||||||||||||||
|
|
dt |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
………………… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
………………… |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
d |
|
|
|
T |
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
d |
|
|
|
L |
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
Qн |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Qн . |
||||||||||||||||||||||||||||||||||
|
dt |
|
q |
q |
|
|
|
|
|
|
|
|
|
|
|
q |
q |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
н |
|
|
|
н |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
131 |
||||||||
2ДИНАМІКА
3.6Завдання Д.1. Інтегрування диференційних рівнянь руху матеріальної точки
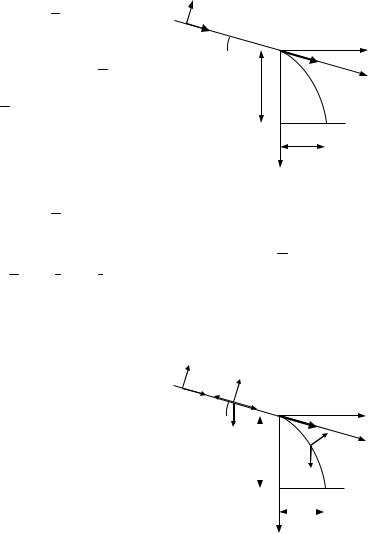
Тіло масою m=2 кг отримало в y1 |
vA |
|
|
|
|
|
|||||||||
точці А швидкість |
A і рухається по |
A |
B |
|
|
x2 |
|||||||||
площині |
АВ |
, яка нахилена під кутом |
|
|
|
||||||||||
до горизонту. В точці В тіло поки- |
|
|
|
|
|
|
vB |
|
|||||||
|
|
|
|
|
|
|
|||||||||
дає площину зі швидкістю |
B |
і падає |
|
|
h |
|
|
x1 |
|||||||
|
|
|
|
|
DС зі |
|
|
|
|
|
|
||||
на горизонтальну площину |
|
|
|
|
|
|
|||||||||
швидкістю |
C в точці С, положення |
|
|
|
|
|
|
|
|
C |
|||||
якої визначається координатами d і h |
|
|
|
|
|
|
d |
|
|
||||||
|
|
|
D |
|
|
|
|
||||||||
(див. рис. 3.1). |
|
|
|
|
|
y2 |
|
y |
|
|
|
||||
На ділянці АВ, довжиною l1, на |
|
|
|
|
|
|
|
||||||||
тіло діють: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 3.1 |
|
– сила ваги P |
і сила тертя Fтр ; |
|||||
|
||||||
– змінна сила Fx1 , яка наведена в таблиці 3.1.
Якщо кут задано зі знаком мінус, то тіло на ділянці АВ піднімається. На ділянці ВС тіло рухається під дією сили ваги P і сили опору
середовища T Tx2 i Ty2 j .
Час руху тіла на ділянках АВ і ВС відповідно становить t1 і t3. Коефіцієнт тертя і дані для розрахунків наведені в таблиці 3.1.
Знайти закони руху тіла на ділянках АВ і ВС, а також величини, які наведені в таблиці 3.1.
3.7Приклад виконання завдання Д.1
Знайти закони руху точки на ділянках АВ і ВС, якщо дано:
m=2 кг; |
d=2 м; |
|
|
2 |
, H; |
vA=2 м/с; Тх2 2х2 |
||
f=0.1; |
Ty2 2y2 , H; |
|
Fx1=2t H; |
α=30°; |
|
t1=1 c; vB, t2 – знайти додатково.
y1 |
vA |
|
тр |
|
|
|
|
|
|
|
|
|
|||
N |
|
|
|
|
|
||||||||||
F |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||
A |
° |
|
Fx1 B |
vB |
|
|
x2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
P |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
h |
|
|
T |
x1 |
||||||
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
C |
|
|
|
|
|
|
|
|
|
|
D |
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
y2 |
y |
|
|
|
|
|
|
|
|
|
|
|
Рисунок 3.2 |
|
|
|
|||||||
132
133
Таблиця2.1
Варіант |
vA |
vB |
Fx1 |
|
|
|
Tx2 |
Ty2 |
l1 |
d |
h |
t1 |
|
t2 |
|
f1 |
Знайти |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
додатково |
|||||
|
м/с |
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
м |
|
|
с |
град (°) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
1. |
0.0 |
– |
2t+4sin2t |
|
0.4 x2 |
0.4y2 |
– |
5 |
– |
1.0 |
|
– |
0 |
0.1 |
h, t2, vB |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
0.0 |
– |
8x1 |
|
|
2cos4t |
|
|
|
– |
– |
– |
1.0 |
|
– |
30 |
0.1 |
vB |
|
|
||||||||
|
|
2 y2 |
|
|
|
|||||||||||||||||||||||
3. |
0.0 |
– |
4cost |
|
|
2x2 |
2 y2 +2 |
– |
– |
– |
1.0 |
|
1.0 |
45 |
0.1 |
d, vB |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. |
2.5 |
– |
10e |
2t |
|
|
2 |
10y2 |
5.0 |
– |
– |
– |
|
– |
0 |
0.0 |
t |
, v |
B |
|
||||||||
|
|
|
|
|
|
|
10 x2 |
|
|
|
|
|
|
|
|
1 |
|
|
||||||||||
5. |
0.0 |
– |
2t–t |
3 |
|
|
–4(x–2 x2 ) |
0 |
|
|
– |
– |
10 |
1.0 |
|
– |
30 |
0.1 |
t2, vB |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6. |
0.0 |
– |
–8x1+8 x1 |
|
0 |
30e |
–t |
– |
4.78 |
– |
0.5 |
|
– |
30 |
0.1 |
h, t2, vB |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7. |
1.0 |
– |
|
|
|
|
|
|
|
2 |
|
–8x2 |
–3 y2 |
– |
– |
– |
3.0 |
|
– |
0 |
0.0 |
h, d, t2, vB |
||||||
10(–3+t ) |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
8. |
1.0 |
7.4 |
4e |
2t |
|
|
|
3 |
0 |
|
|
– |
– |
4.905 |
– |
|
– |
0 |
0.0 |
d, t , t |
1 |
|||||||
|
|
|
|
|
|
|
|
|
–2 x2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
||||||
9. |
0.0 |
– |
–18 x |
1 |
–12x |
1 |
2 |
2–2sint |
– |
1.0 |
– |
1.0 |
|
– |
60 |
0.2 |
t |
, v |
B |
|
||||||||
|
|
|
|
|
|
|
|
|
6 x2 |
|
|
|
|
|
|
|
|
2 |
|
|
||||||||
10 |
0.0 |
– |
4(t |
2 |
|
|
|
|
3 |
) |
|
–8x2–4 x2 |
–8y2 |
– |
2.0 |
– |
1.0 |
|
– |
30 |
0.1 |
h, t2, vB |
||||||
|
–t |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
11 |
2.0 |
– |
–4 x |
1 |
|
|
2x2 |
–4e |
–2t |
0.865 |
– |
– |
– |
|
– |
0 |
0.0 |
t1, vB |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
12 |
0.0 |
– |
4e |
t |
|
|
|
|
2 |
2cost |
– |
3.0 |
– |
2.0 |
|
– |
–30 |
0.1 |
h, t , v |
|||||||||
|
|
|
|
|
|
|
|
–2 x2 |
|
|
|
|
|
|
|
|
|
2 |
|
B |
||||||||
13 |
2.62 |
7.87 |
16 |
|
|
|
8e |
–2t |
4( y2 –y2) |
– |
– |
– |
– |
|
0.5 |
–30 |
0.1 |
d, h, t2, l1 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
14 |
0.0 |
6.0 |
24t |
|
|
8cos2t |
6(y2+ y2 ) |
– |
1.0 |
– |
– |
|
– |
–45 |
0.1 |
|
t1 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
15 |
0.0 |
– |
–8x1 |
|
|
4 x2 –6x2 |
4.0 |
1.015 |
– |
7.015 |
– |
|
– |
30 |
0.1 |
d, vB, t2, t1 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
АМЕХАНІК ЕОРЕТИЧНАТ

134
Продовження таблицi 2.1
Варіант |
v |
|
v |
|
|
Fx |
|
|
|
Tx |
|
|
|
|
|
|
Ty |
|
|
l |
|
d |
h |
t |
|
t |
|
|
f1 |
Знайти |
|||||||
|
A |
|
B |
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
1 |
м |
|
|
1 |
|
2 |
град (°) |
додатково |
||||||
|
|
м/с |
|
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|||||
16 |
0.0 |
3.0 |
|
|
6t |
|
–(20x2–4 x |
2 ) |
4(cost–4.905) |
– |
– |
2 |
– |
– |
0 |
0.1 |
|
t2, t1 |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
17 |
3.03 |
– |
–4 x1 |
–2x2 |
|
|
|
2(2 y2 +y2–9.81 |
– |
1.87 |
– |
1.0 |
– |
30 |
0.1 |
t2, vB |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
18 |
2.0 |
– |
4 x1 –2x1+7.63 |
8+8x2 |
|
|
|
–5.81 |
– |
– |
2.0 |
1.0 |
– |
–45 |
0.1 |
t2, vB |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
19 |
1.0 |
– |
–4e |
–2t |
+0.2g |
|
|
2 |
|
|
|
–2(y2+7.81) |
0.5 |
– |
2.0 |
– |
– |
0 |
0.1 |
t |
, t , v |
||||||||||||||||
|
|
|
|
|
|
|
–2 x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
B |
||||||||||||
20 |
1.75 |
5.25 |
4 x1 –2x1+8 |
8+8x2 |
|
|
–11.62 |
– |
– |
3.0 |
– |
– |
–30 |
0.1 |
t1, t2, l1 |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
21 |
1.0 |
5.0 |
4(1+e |
2t |
–2.0 x |
2 |
|
|
|
|
2y2 |
|
– |
1.5 |
– |
– |
– |
0 |
0.204 |
t1, t2, l1, vC |
|||||||||||||||||
) |
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
22 |
1.0 |
– |
–8 x2 +0.2g |
–0.2 x |
3 |
|
|
–2(sint+g) |
– |
– |
– |
0.25 |
– |
0 |
0.1 |
|
|
|
vB |
||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
23 |
1.0 |
– |
|
3 |
–8.12 |
|
2.0 |
|
|
|
4 y |
2 |
–2y |
–2g |
– |
2.0 |
– |
0.5 |
– |
30 |
0.1 |
v , t |
, v |
||||||||||||||
|
|
|
|
|
– x1 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
C |
2 |
B |
||||||||
24 |
1.0 |
5.0 |
|
|
4t |
|
–2 x2 |
|
|
|
–4(y2+ y2 ) |
– |
2.74 |
– |
– |
– |
–30 |
0.1 |
|
t1, t2 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
25 |
2.0 |
– |
|
–3t |
|
|
–6 x |
2 –2x2 |
|
|
–7.62 |
– |
– |
3 |
⅓ |
– |
0 |
0.1 |
t2, vB |
||||||||||||||||||
–12e |
+1.962 |
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.0 |
2.0 |
8cos2t+11.5 |
2–4x2 |
|
|
|
–4e–2t |
– |
– |
– |
– |
1.0 |
–30 |
0.1 |
h, t1, l1, d |
|||||||||||||||||||||
26 |
|
|
|
||||||||||||||||||||||||||||||||||
27 |
1.0 |
– |
|
2 |
–8) |
–4e |
–2t |
|
|
–(8y2+2g) |
0.693 |
– |
0.866 |
– |
– |
60 |
0.1 |
t |
, t , v |
||||||||||||||||||
|
|
|
|
|
2( x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
B |
|||||||||||||
28 |
0.0 |
– |
|
4x1 |
|
–4sin2t |
|
|
–0.4 y2 –20.02 |
– |
– |
– |
1.0 |
– |
0 |
0.1 |
|
|
|
vB |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
29 |
0.0 |
4.0 |
23.26 |
–6 x |
2 |
+3.5x |
2 |
|
|
2 |
–2g |
– |
– |
2.0 |
– |
– |
–45 |
0.1 |
t |
, t , l |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
–2 y2 |
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
1 |
|||||||
30 |
1.0 |
– |
0.2 x |
1 –8.12 |
|
4.0 |
|
|
|
–4cos2t–0.2g |
3.57 |
2.0 |
– |
– |
– |
30 |
0.1 |
t1, t2, vB |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Примітки. 1. В cos(t) i sin( t) аргумент ( t) має розмірність рад/с. |
|
2. g=9.81 м/c2. |
|
|
|
|
|
||||||||||||||||||||||||||||
ДИНАМІКА 3

ТЕОРЕТИЧНА МЕХАНІКА
Розв’язання
На рис. 3.2 рух тіла на ділянках АВ і ВС розглянемо відносно нерухомих систем координат x1Ay1 і x2By3.
На ділянці АВ тіло рухається під дією сил P , N , F і Fтp . По-
чаткові умови руху тіла на ділянці АВ |
|
|
|
|
x10 A . |
|
|||||||||||||
|
t1=0; |
|
|
|
|
x10=0; |
|
|
|
|
|
(3.6) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Запишемо диференціальні рівняння руху тіла в системі координат |
||||||||||||||||||
x1Ay1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mx1 P sin 30 |
|
Fx |
|
|
|
|
|
|||||||||||
|
|
Fтр; |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
(3.7) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
N |
P cos 30 |
|
. |
|
|
|
|
|
|||||||||
|
my1 |
|
|
|
|
|
|
|
|||||||||||
|
Під час руху тіло не відривається від площини АВ, тому |
|
|||||||||||||||||
|
y1=0; |
|
|
|
|
y1 0 ; |
|
|
|
|
y1 0 . |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Із другого рівняння (3.7) |
|
|
|
N P cos 30 |
mg cos 30 . |
|
||||||||||||
|
Сила тертя |
|
|
|
|
|
F |
|
fN fmg cos 30 . |
|
|||||||||
|
|
|
|
|
|
|
|
тp |
|
|
|
|
|
|
|
|
|
|
|
|
Тоді перше рівняння (3.7) набирає вигляду |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
30 |
|
2t fmg cos |
30 |
|
|
||||||||
|
mx1 P sin |
|
|
|
|||||||||||||||
або |
|
30 |
|
f cos |
30 |
|
|
|
|
t 4.06 . |
(3.8) |
||||||||
x1 t g sin |
|
|
|
x1 |
|||||||||||||||
|
Проінтегруємо двічі рівняння (3.8) |
|
|
|
|
|
|
|
|
|
|||||||||
|
x1 |
1 |
t |
2 |
4.06t C1; |
|
|
|
|||||||||||
|
|
|
|
|
|
||||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.9) |
|||
|
x 1 t3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
2.03t2 C t C |
. |
|
||||||||||||||||
|
1 |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
135 |

2 ДИНАМІКА |
|
|
|
|
|
|
|
Постійні інтегрування С1 і |
С2 |
визначимо із початкових |
|||||
умов (3.6) |
|
1 |
|
|
|
|
|
|
0 A |
0 |
4.06 0 |
C1 |
C1 A 2 м/с; |
||
|
|||||||
x10 |
2 |
||||||
|
|
|
|
|
|
||
x10 0 0 16 0 2.03 0 C1 0 C1 0 C2 C2 0 .
Отже, рівняння руху важкого тіла на ділянці АВ набувають вигляду
|
|
|
|
|
|
|
|
|
x |
1 |
t3 2.03t2 |
2 ; |
|
|
y1=0. |
|
|
|
(3.10) |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Із рівняння (3.9) при t1=1.0 c маємо |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
2 6.56 м/с. |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
B x1 1.0 |
2 |
1 |
4.06 1 |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
На ділянці ВС на тіло діють сили |
|
|
|
|
|
|
|||||||||||||||||||||||||
|
Р |
і Т |
. Початкові умови руху |
|||||||||||||||||||||||||||||
тіла на ділянці ВС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
t2=0; x20=0; y20=0; |
|
|
|
|
|
|
|
|
; |
|
|
B sin30 |
|
. |
(3.11) |
|||||||||||||||||
|
x20 B cos30 |
|
y20 |
|
|
|||||||||||||||||||||||||||
|
Запишемо диференціальні рівнянняруху тіла в системі координат x2By2 |
|||||||||||||||||||||||||||||||
|
|
Tx |
|
|
|
|
|
Ty |
|
P |
|
|
або |
|
|
|
|
2 |
; |
|
|
|
mg ; |
|||||||||
mx2 |
|
2 |
; my2 |
2 |
|
|
mx2 2x2 |
my2 2 y2 |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
; |
|
|
|
|
y2 |
g . |
|
|
|
|
|
(3.12) |
|||||||
|
|
|
|
|
|
|
|
|
x2 |
x2 |
|
|
|
y2 |
|
|
|
|
|
|||||||||||||
|
Проінтегруємо |
перше |
|
рівняння |
із (3.12), |
враховуючи, що |
||||||||||||||||||||||||||
|
|
|
dx2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
dx2 |
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
1 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
x2 x2 |
|
dx2 dt2 |
|
t2 C3 . |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
136 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТЕОРЕТИЧНА МЕХАНІКА
Постійну С3 визначимо із умов (3.11) |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
1 |
0 C |
3 |
C |
3 |
|
|
1 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
1 |
|
0.176 . |
||||||||||||
x20 |
|
|
|
|
|
|
|
|
|
6.56 0.866 |
5.68 |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
B cos |
30 |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
Тоді |
|
|
|
|
t2 |
0.176 |
|
|
|
|
|
або |
|
|
|
|
|
|
|
|
і |
|||||||||||||||
|
|
|
|
|
|
|
|
|
x2 |
0.176 |
t2 |
|||||||||||||||||||||||||
|
|
|
|
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
x2 ln |
|
|
0.176 t2 |
|
C4 . |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Із початкових умов (3.11) визначимо С4 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
x2 0 0 ln |
|
0.176 0 |
|
C4 |
C4 |
ln0.176 . |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
Закон руху тіла на ділянці ВС має вигляд |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
x2 ln |
|
|
|
|
0.176 |
|
|
. |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.176 t2 |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Знайдемо час руху тіла на ділянці ВС при d=3.0 м |
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
x2 |
d ln |
|
0.176 |
|
|
|
|
|
0.176 |
|
ed e2 , |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
0.176 |
t2 |
|
0.176 |
|
t2 |
|
|||||||||||||||||||||||||
звідси t2=0.15 c. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Проінтегруємо друге рівняння (3.12) |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
g . |
|
|
(3.13) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
y2 |
|
y2 g y2 y2 |
|
|
||||||||||||||||||||
Загальний розв’язок цього рівняння має вигляд |
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y2 y2од у2част , |
|
|
|
|
|
|
|
||||||||||||||
|
|
од |
– |
розв’язок однорідного рівняння |
|
|
у2 |
0 , |
який ви- |
|||||||||||||||||||||||||||
де у2 |
|
у2 |
||||||||||||||||||||||||||||||||||
значають за виглядом корeнів характеристичного рівняння
137
2 ДИНАМІКА
2 1 0 |
ik |
(k=1); |
yод С |
5 |
cos kt C |
6 |
sin kt . |
1,2 |
|
|
2 |
|
|
у2част – частковий розв’язок вибирають у формі правої частини.
Приймаємо у2част A і підставляємо в (3.13)
0 A g A g y2част g 9.81.
Тоді загальний розв’язок рівняння (3.13) буде
y |
2 |
C |
5 |
cos kt C |
6 |
sin kt 9.81; |
|
|
|
|
|
|
|
(3.14) |
|||
|
|
|
|
|
|
|
|
|
|
|
kC5 sin kt kC6 cos kt. |
|
|
||||
y2 |
|
|
||||||
Постійні С5 і С6 визначимо за допомогою умов (3.11) y20 0 0 C5 1 C6 0 9.81 C5 9.81;
y20 0 B sin30 |
|
k C5 |
0 k C6 |
1 C6 |
|
B sin30 |
3.28 . |
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
Закон руху тіла на ділянці ВС має вигляд
y2 9.81cos t 3.28 sin t 9.81, м.
Відповідь. Закони руху тіла на ділянці АВ
|
|
x |
1 |
t3 |
2.03t2 2 , м; y1=0, |
||
|
|
|
|||||
|
|
1 |
6 |
|
|
||
|
|
|
|
|
|||
на ділянці ВС |
|
|
|
|
|
||
x2 ln |
|
0.275 |
|
, м; |
y2 3.28 sin t 9.81 1 cos t , м. |
||
|
|
||||||
|
0.275 t |
2 |
|||||
|
|
|
|
|
|
||
Швидкість тіла в точці В – vB=6.56 м/с, час руху тіла на |
|||||||
ділянці ВС – |
t2=0.15 c. |
|
|||||
138 |
|
|
|
|
|
|
|
ТЕОРЕТИЧНА МЕХАНІКА
3.8Завдання Д.3. Застосування основних теорем динаміки для дослідження руху матеріальної точки
Кулька, яку вважаємо матеріальною точкою, починає рухатися з положення А в середині трубки, вісь якої розміщена у вертикальній площині (рис. 3.3).
Визначити:
–швидкість кульки в положеннях В та С;
–тиск її NC на стінки трубки в положенні С.
Тертям на криволінійних ділянках траєкторії руху кульки знехтувати. У варіантах 3, 6, 7, 9, 10, 17, 30 кулька, пройшовши відстань h0, відривається від пружини. Необхідні для розрахунку величини наведені в табл. 3.2 і 3.3.
Узавданні прийняті такі позначення:
–m=0.5 кг – маса кульки (для всіх варіантів);
–vA – її початкова швидкість;
–– час руху кульки на ділянці АВ (в варіантах 1–3, 6–8, 10, 13–
15, 18–20, 22, 23, 25, 27) або на ділянці ВD (в варіантах 4, 9, 11, 12, 16, 17. 21, 24, 26, 28–30);
–f=0.2 – коефіцієнт тертя ковзання (для всіх варіантів);
–h0 – початкова деформація пружини;
–с – коефіцієнт жорсткості пружини;
–Н – найбільша висота вертикального переміщення кульки;
–s – шлях пройдений кулькою до зупинки;
–h – найбільша деформація пружини;
–R=2 м – радіус закруглення трубки (для всіх варіантів).
139

2 ДИНАМІКА
Таблиця 3.2
№ |
|
vA, |
, |
, |
h0, |
С, |
Визначити |
вар. |
|
м/с |
с |
град |
см |
Н/см |
додатково |
1 |
20 |
2.0 |
30 |
– |
– |
– |
|
2 |
3 |
1.0 |
30 |
– |
– |
– |
|
3 |
0 |
0.1 |
10 |
12 |
5 |
vD |
|
4 |
5 |
0.3 |
45 |
– |
– |
vD |
|
5 |
|
0 |
– |
50 |
50 |
5 |
vD |
6 |
1 |
0.5 |
30 |
– |
4 |
h |
|
7 |
0 |
1.0 |
15 |
15 |
5 |
vD |
|
8 |
15 |
0.2 |
45 |
– |
– |
H |
|
9 |
4 |
0.1 |
30 |
20 |
4 |
vD |
|
10 |
15 |
0.5 |
20 |
– |
5 |
vD, h |
|
11 |
6 |
1.0 |
45 |
– |
3 |
vD, h |
|
12 |
2 |
0.2 |
30 |
– |
– |
vD |
|
13 |
0 |
2.0 |
60 |
– |
– |
S |
|
14 |
10 |
0.5 |
50 |
– |
4 |
h, vD |
|
15 |
3 |
1.6 |
60 |
– |
1 |
h |
|
16 |
5 |
0.4 |
30 |
– |
– |
vD |
|
17 |
0 |
0.1 |
60 |
30 |
2 |
vD |
|
18 |
9 |
1.0 |
10 |
– |
6 |
vD, h |
|
19 |
3 |
0.4 |
45 |
– |
– |
– |
|
20 |
10 |
1.0 |
10 |
– |
6 |
vD, h |
|
21 |
9 |
1.5 |
15 |
– |
8 |
h |
|
22 |
3 |
0.3 |
45 |
– |
– |
– |
|
23 |
2 |
0.4 |
45 |
– |
– |
– |
|
24 |
16 |
1.5 |
20 |
– |
6 |
h |
|
25 |
2 |
0.4 |
45 |
– |
– |
– |
|
26 |
12 |
0.1 |
30 |
– |
– |
vD |
|
27 |
5 |
0.3 |
30 |
– |
– |
tDE |
|
28 |
0 |
0.2 |
45 |
– |
– |
vD |
|
29 |
1 |
0.2 |
45 |
– |
1 |
vD, h |
|
30 |
0 |
1.0 |
10 |
20 |
3 |
vD |
|
140