ОСНОВИ БУДОВИ АРТИЛЕРІЙСЬКИХ
.pdf
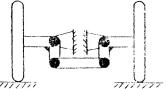
Рисунок 4.95 – Схема шарнірного механізму самоустановлення нижнього станка
При нерухомому з’єднанні бойової осі або півосі бойової ходової частини з лобовою коробкою під час переведення гармати у бойове положення найбільш вірогідним буде випадок, коли одна з чотирьох опор гармати не буде прилягати до ґрунту. Щоб уникнути такого положення, в гарматах з бойовою ходовою частиною у вигляді бойової осі з колесами лобова коробка, як правило, з’єднується з бойовою віссю шарнірно за допомогою горизонтального штиря. При розміщенні коліс на ґрунті лобова коробка може повертатися під дією сил ваги відносно осі штиря шарніра доти, поки хоботові листи не стануть на ґрунт.
У похідному положенні поворот бойової осі відносно лобової коробки вимикається.
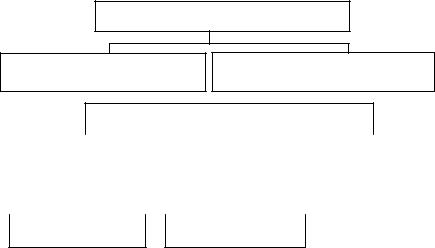
Рисунок 4.96 – Схема зубчастого механізму самоустановлення нижнього станка
Зубчастий механізм використовують у гарматах з незалежною підвіскою коліс, що рухаються у поздовжній площині. Схема такої ходової частини показана на рисунку 10.28. Її використовують для гармат Т-12, Д-48.
452