

7.2. Метод Ньютона (дотичних)
Цей метод дуже ефективний для розв’язання алгебраїчних і трансцендентних рівнянь. Його основна перевага полягає в тому, що при порівняно простій схемі обчислень він має швидку збіжність.
Нехай єдиний корінь
![]() рівняння
рівняння
![]() (1)
(1)
розташований усередині
інтервалу
![]() ,
причому
,
причому![]() і
і![]() неперервні і зберігають визначені знаки
неперервні і зберігають визначені знаки![]() .
Відповідно до методу Ньютона корінь
вихідного рівняння відшукується як
границя ітераційної послідовності
.
Відповідно до методу Ньютона корінь
вихідного рівняння відшукується як
границя ітераційної послідовності
![]() .
(2)
.
(2)
Початкове наближення
![]() і повинне задовольняти умові
і повинне задовольняти умові
![]() . (3)
. (3)
Геометрично метод Ньютона
еквівалентний заміні рівняння кривої
![]() рівнянням дотичної, проведеної до цієї
кривої в точці
рівнянням дотичної, проведеної до цієї
кривої в точці![]() .
За наближене значення кореня береться
абсциса точки перетину цієї дотичної
з віссю
.
За наближене значення кореня береться
абсциса точки перетину цієї дотичної
з віссю![]() .
.
 Для
оцінки точності наближення
Для
оцінки точності наближення![]() можна скористатися формулою
можна скористатися формулою
![]() , (4)
, (4)
де
![]() ,
,![]() ,
(5)
,
(5)
![]() – точне значення кореня.
– точне значення кореня.
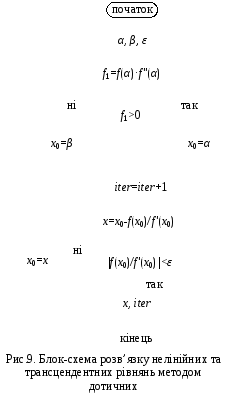
На рис. 9 наведено блок-схему програми розв’язку нелінійних та трансцендентних рівнянь методом дотичних.
У даній блок-схемі: α – лівий кінець інтервалу; β – правий кінець інтервалу; ε – точність обчислень; x0 – корінь рівняння на попередній ітерації; x – корінь рівняння на поточній ітерації; iter – номер ітерації; f(x) – значення функції у точці x.
Знайдемо, наприклад, з точністю
![]() корінь рівняння
корінь рівняння![]() .
Виконавши процедуру відділення коренів
так, як описано вище (див. Розділ 3.
Загальні положення) одержимо три
інтервали
.
Виконавши процедуру відділення коренів
так, як описано вище (див. Розділ 3.
Загальні положення) одержимо три
інтервали![]() ,
,![]() ,
,![]() ,
що містять корінь. Знайдемо корінь,
розташований в інтервалі
,
що містять корінь. Знайдемо корінь,
розташований в інтервалі![]() .
Цей інтервал методом бісекції зменшимо
так, щоб його довжина була
.
Цей інтервал методом бісекції зменшимо
так, щоб його довжина була![]() .
.
Маємо:
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() ;
;
![]()
![]() .
.
Довжина отриманого інтервалу
![]() .
.
Подальше уточнення кореня проведемо методом Ньютона.
Друга похідна
![]() на цьому інтервалі більше нуля, перша
похідна
на цьому інтервалі більше нуля, перша
похідна![]() – менше нуля. За початкове наближення
– менше нуля. За початкове наближення![]() візьмемо лівий кінець інтервалу, тобто
візьмемо лівий кінець інтервалу, тобто![]() .
Тоді
.
Тоді

Обчислимо значення першої
похідної
![]() на другому кінці інтервалу й оцінимо
похибку отриманого наближення
на другому кінці інтервалу й оцінимо
похибку отриманого наближення![]() ,
тобто
,
тобто![]() .
.
![]() .
.
Точність, з якою обчислене перше наближення, недостатня. Тому робимо наступний крок
 ,
,
![]() .
.
Як видно з оцінки похибки другого наближення, ми одержали значення кореня з похибкою, що не перевищує задану.
Корені, розташовані в двох
інших інтервалах
![]() ,
,![]() знаходяться аналогічно.
знаходяться аналогічно.
Питання для самоперевірки
Сформулюйте постановку задачі, опишіть метод Ньютона.
Наведіть формулу для контролю похибки методу Ньютона.
Дайте геометричну інтерпретацію методу.
В чому полягає умова вибору нульового наближення?
7.3. Метод пропорційних частин (хорд)
Розрахункові формули цього
методу отримані з таких міркувань.
Інтервал
![]() ,
усередині якого розташований корінь
рівняння
,
усередині якого розташований корінь
рівняння
![]() ,
(1)
,
(1)
ділимо у відношенні
![]() .
Це дасть нам наближене значення кореня
.
Це дасть нам наближене значення кореня![]() ,
де
,
де
![]() ,
,
![]() .
(2)
.
(2)
Далі, застосовуючи цей прийом
до одного з відрізків
![]() чи
чи![]() ,
на кінцях якого функція
,
на кінцях якого функція![]() має протилежні знаки, одержимо друге
наближення
має протилежні знаки, одержимо друге
наближення![]() і т.д.
і т.д.
Геометрично спосіб пропорційних
частин еквівалентний заміні рівнянь
кривої
![]() рівнянням хорди, що проходить через
точки
рівнянням хорди, що проходить через
точки![]() і
і![]() .
За наближене значення кореня приймається
абсциса точки перетину хорди з віссю
.
За наближене значення кореня приймається
абсциса точки перетину хорди з віссю![]() .
.
Уточнення кореня варто проводити доти, поки не буде досягнута задана точність. Для оцінки точності наближення можна скористатися формулою
![]() ,
,
де
![]() ,
,![]() ,
(3)
,
(3)
![]() – точне значення кореня.
– точне значення кореня.
 На
рис. 10
наведено блок-схему програми розв’язку
нелінійних та трансцендентних рівнянь
методом хорд.
На
рис. 10
наведено блок-схему програми розв’язку
нелінійних та трансцендентних рівнянь
методом хорд.
У даній блок-схемі: α – лівий кінець інтервалу; β – правий кінець інтервалу; ε – точність обчислень; x0 – корінь рівняння на попередній ітерації; x – корінь рівняння на поточній ітерації; iter – номер ітерації; f(x) – значення функції у точці x.
Наприклад, знайдемо з точністю
до
![]() корені рівняння
корені рівняння![]() .
Виконавши процедуру відділення коренів
так, як описано вище (див. Розділ 3.
Загальні положення) одержимо три
інтервали
.
Виконавши процедуру відділення коренів
так, як описано вище (див. Розділ 3.
Загальні положення) одержимо три
інтервали![]() ,
,![]() ,
,![]() ,
що містять корінь. Знайдемо корінь,
розташований в інтервалі
,
що містять корінь. Знайдемо корінь,
розташований в інтервалі![]() .
.
Маємо
![]() ,
,![]() ,
,![]() .
.
Від нескінченного інтервалу
перейдемо до скінченого, замінивши його
ліву границю скінченим числом менше
нуля, але таким, щоб значення функції в
ньому було від’ємним. Інтервал
![]() задовольняє цим вимогам:
задовольняє цим вимогам:![]() .
Крім того,
.
Крім того,![]() на цьому інтервалі знакопостійна і,
отже,
на цьому інтервалі знакопостійна і,
отже,![]() – монотонна й досягає найбільшого й
найменшого значення на кінцях інтервалу.
Використовуючи метод бісекції, зменшимо
цей інтервал так, щоб його довжина була
– монотонна й досягає найбільшого й
найменшого значення на кінцях інтервалу.
Використовуючи метод бісекції, зменшимо
цей інтервал так, щоб його довжина була![]() .
.
Маємо:
![]() корінь
корінь
![]() ;
;
![]() корінь
корінь
![]() ;
;
![]() корінь
корінь
![]() ;
;
![]() корінь
корінь
![]() ;
;
Довжина отриманого інтервалу
![]() ,
тому надалі будемо працювати з цим
інтервалом.
,
тому надалі будемо працювати з цим
інтервалом.
Обчислюючи значення першої
похідної
![]() на кінцях інтервалу, одержуємо
на кінцях інтервалу, одержуємо![]() ;
;![]() .
Отже, у формулі для оцінки похибки як
.
Отже, у формулі для оцінки похибки як![]() можна прийняти
можна прийняти![]() .
.
Оскільки друга похідна на обраному інтервалі від’ємна, то як нерухомий кінець у формулі для обчислення кореня за методом хорд варто взяти лівий кінець інтервалу, тобто розрахункова формула набуде вигляду:
 ,
,
![]() ,
,
де
![]() ,
,![]() .
.
Виконуючи розрахунок за цією
формулою при
![]() ,
одержимо
,
одержимо![]() ,
,![]() .
.
Обчислимо похибку
![]() .
.
Таким чином, уже перше наближення дає значення кореня з потрібною точністю.
Корені, розташовані в двох
інших інтервалах
![]() ,
,![]() знаходяться аналогічно.
знаходяться аналогічно.