

1. Определение закона движения начального звена плунжерного механизма
1.1 Кинематическая схема рычажного механизма и рабочий график работы насоса
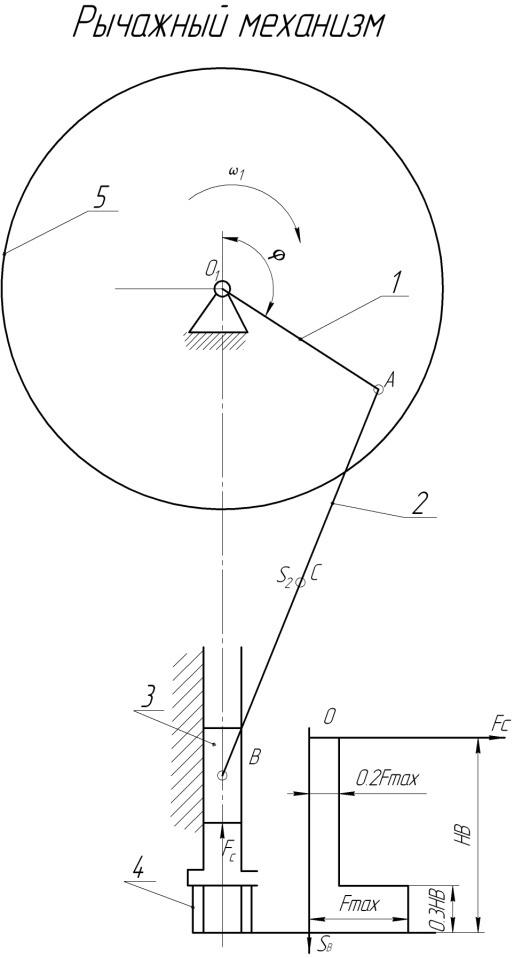
1.2 Исходные данные. Размеры и соотношения размеров звеньев рычажного механизма
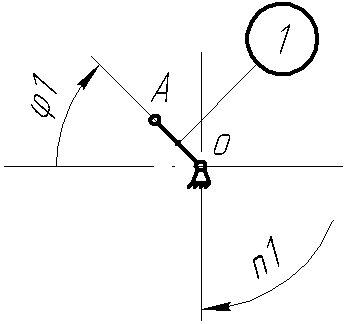
длина
кривошипа

отношение
длины шатуна к длине кривошипа
 ,
тогда имеем
,
тогда имеем
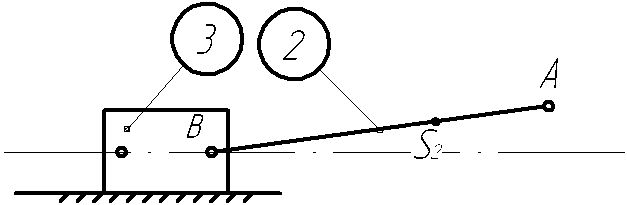
Положение
центра масс шатуна 2
 и
тогда имеем
и
тогда имеем
Масса
шатуна
 ,
масса поршня
,
масса поршня ,
момент инерции шатуна
,
момент инерции шатуна ,
коленчатого вала
,
коленчатого вала
1.3 Структурное исследование механизма
Степень подвижности плоского механизма определяется по ф-ле академика
П.Л.Чебышева
 ,
где
,
где
 –кол-во
подвижных звеньев
–кол-во
подвижных звеньев
 --
кол-во кинематических пар 5-го класса
--
кол-во кинематических пар 5-го класса
 --
кол-во кинематических пар 4-го класса
--
кол-во кинематических пар 4-го класса
Подставив
данные получим

Разбиваем механизм на группы Асура
1.4 Построение схемы и планов положений механизма
Принимаем
на чертеже отрезок, изображающий длину
кривошипа
 и
определяем масштабный коэффициент
и
определяем масштабный коэффициент

 =0.64/0.0032=200
мм
=0.64/0.0032=200
мм
В принятом масштабе вычерчиваем кинематическую схему механизма для построения планов положения звеньев, разделим траекторию движения т.А кривошипа на 12 равных частей. В качестве нулевого принимаем крайнее верхнее положение т.В ползуна 3. Пользуясь методом засечек (в данном случае использован более прогрессивный метод с использованием компьютерного программного обеспечения) строим 12 положений звеньев механизма.
1.5 Построение планов возможных скоростей
Принимаем
вектор скорости т.А кривошипа
 и
из произвольно выбранного полюса Р на
чертеже проводим перпендикулярно к
звену ОА, в направлении скорости вращения
кривошипа отрезок указанной длины.
Скорость т.В ползуна определяем по
уравнениям
и
из произвольно выбранного полюса Р на
чертеже проводим перпендикулярно к
звену ОА, в направлении скорости вращения
кривошипа отрезок указанной длины.
Скорость т.В ползуна определяем по
уравнениям
 и
и
 ,
где
,
где
 известна
по величине и направлению
известна
по величине и направлению
 вектор
скорости т.В относительно т.А, известный
по направлению, перпендикулярный звену
АВ и проходит через т.А плана скоростей
вектор
скорости т.В относительно т.А, известный
по направлению, перпендикулярный звену
АВ и проходит через т.А плана скоростей
 скорость стойки (равна нулю)
скорость стойки (равна нулю)
 вектор скорости т.В относительно полюса,
известный по направлению, параллельный
движению ползуна В и проходит через
полюс плана скоростей.
вектор скорости т.В относительно полюса,
известный по направлению, параллельный
движению ползуна В и проходит через
полюс плана скоростей.
Произведя необходимые построения, найдем т.В. На основании теоремы подобия находим расположения точки центра тяжести звена 2, а соединяя её с полюсом получим вектора скоростей.
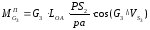
1.6 Построение графика приведенных моментов сил полезного сопротивления и тяжести
Приведенный момент сил определяется по ф-ле
 (1.1),
где
(1.1),
где
 –приведенная
к точке А сила полезного сопротивления
и сил тяжести звеньев,
–приведенная
к точке А сила полезного сопротивления
и сил тяжести звеньев,
pb, pa – отрезки на чертеже
Силы
веса звеньев, определяются по ф-ле



Для
положений 0…3,9…12 имеем

Для
положений 4…8 имеем

Масштаб
углов поворота кривошипа

Принимаем
максимальную высоту диаграммы изменения
давления в цилиндрах

Масштабный
коэффициент диаграммы:

Значение сил полезного сопротивления находим в таблице 1.0.
Таблица 1.0
|
№ |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
h, мм |
10 |
10 |
10 |
10 |
50 |
50 |
50 |
50 |
50 |
10 |
10 |
10 |
|
F |
680 |
680 |
680 |
680 |
3400 |
3400 |
3400 |
3400 |
3400 |
680 |
680 |
680 |
По данным таблицы 1.2. вычисляем формулу (1.1.). Результаты расчета приведены в таблице 1.3.
Таблица 1.3.
|
№ |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
|
680 |
680 |
680 |
680 |
3400 |
3400 |
3400 |
3400 |
3400 |
680 |
680 |
680 |
|
|
50 | |||||||||||
|
Pb, мм |
0 |
27.36 |
52.4 |
70 |
68.38 |
42.63 |
0 |
42.63 |
68.38 |
70 |
52.86 |
27.36 |
|
Pa, мм |
70 | |||||||||||
|
- |
0.00 |
-13.29 |
-25.45 |
-34.0 |
-166.0 |
-103.5 |
0.00 |
-103.5 |
-166.07 |
-34.00 |
-25.67 |
-13.29 |
|
- |
0.00 |
-8.89 |
-17.02 |
-22.7 |
-111.0 |
-69.23 |
0.00 |
-69.23 |
-111.04 |
-22.73 |
-17.17 |
-8.89 |
 ,
Н
,
Н ,
мм
,
мм ,
,
 ,мм
,ммПриведенный момент сил шатуна 2 определяем по формуле (1.2)
 (1.2)
(1.2)
Для
 принимаем
коэффициент
принимаем
коэффициент
 ,
что и для
,
что и для
Результаты расчетов по формуле (1.2) приведены в таблице 1.4
Таблица 1.4
|
№ |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 | |
|
|
490.5 | ||||||||||||
|
|
50 | ||||||||||||
|
ра, мм |
70 | ||||||||||||
|
|
42 |
48.4 |
61.05 |
70 |
67.09 |
52.64 |
42 |
52.64 |
67.09 |
70 |
61.23 |
48.4 | |
|
G2^PS2 |
90.00 |
48.70 |
20.11 |
0.00 |
18.23 |
43.70 |
90.00 |
136.29 |
161.76 |
180.00 |
159.94 |
131.29 | |
|
|
0.00 |
0.66 |
0.94 |
1.00 |
0.95 |
0.72 |
0.00 |
-0.72 |
-0.95 |
-1.00 |
-0.94 |
-0.66 | |
|
|
0.00 |
11.19 |
20.09 |
24.53 |
22.33 |
13.33 |
0.00 |
-13.33 |
-22.32 |
-24.53 |
-20.15 |
-11.19 | |
|
|
0.000 |
7.484 |
13.430 |
16.399 |
14.929 |
8.916 |
0.000 |
-8.914 |
-14.928 |
-16.39 |
-13.47 |
-7.482 | |
 ,
Н
,
Н ,
мм
,
мм ,мм
,мм


 ,
мм
,
мм
Приведенный момент сил ползуна 3 определяем по формуле (1.3)
 (1.3)
(1.3)
Для
 принимаем
коэффициент
принимаем
коэффициент
 ,
что и для
,
что и для
Результаты расчетов по формуле (1.3) приведены в таблице 1.5
|
№ |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
|
735.75 | |||||||||||
|
|
50 | |||||||||||
|
ра, мм |
70 | |||||||||||
|
|
0 |
27.36 |
52.4 |
70 |
68.38 |
42.63 |
0 |
42.63 |
68.38 |
70 |
52.86 |
27.36 |
|
|
0.00 |
0.00 |
0.00 |
0.00 |
0.00 |
0.00 |
0.00 |
180.00 |
180.00 |
180.00 |
180.00 |
180.00 |
|
|
1.00 |
1.00 |
1.00 |
1.00 |
1.00 |
1.00 |
1.00 |
-1.00 |
-1.00 |
-1.00 |
-1.00 |
-1.00 |
|
|
0.00 |
14.38 |
27.54 |
36.79 |
35.94 |
22.40 |
0.00 |
-22.40 |
-35.94 |
-36.79 |
-27.78 |
-14.38 |
|
|
0.00 |
9.61 |
18.41 |
24.60 |
24.03 |
14.98 |
0.00 |
-14.98 |
-24.03 |
-24.60 |
-18.58 |
-9.61 |
 ,
Н
,
Н ,
мм
,
мм ,мм
,мм



 ,
мм
,
ммТаблица 1.5
Суммарный момент сил определяем по формуле 1.4
 (1.4)
(1.4)
Результаты расчетов по формуле (1.4) приведены в таблице 1.6
Таблица 1.6
|
№ |
0 |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
|
|
0.00 |
-13.29 |
-25.45 |
-34.00 |
-166.0 |
-103.5 |
0.00 |
-103.5 |
-166.0 |
-34.00 |
-25.67 |
-13.2 |
|
- |
0.00 |
-8.89 |
-17.02 |
-22.73 |
-111.0 |
-69.23 |
0.00 |
-69.23 |
-111.0 |
-22.73 |
-17.17 |
-8.89 |
|
|
0.00 |
11.19 |
20.09 |
24.53 |
22.33 |
13.33 |
0.00 |
-13.33 |
-22.3 |
-24.53 |
-20.15 |
-11.1 |
|
|
0.000 |
7.484 |
13.430 |
16.399 |
14.929 |
8.916 |
0.000 |
-8.914 |
-14.92 |
-16.399 |
-13.47 |
-7.48 |
|
|
0.000 |
14.379 |
27.538 |
36.788 |
35.936 |
22.404 |
0.000 |
-22.40 |
-35.93 |
-36.788 |
-27.78 |
-14.3 |
|
|
0.000 |
9.615 |
18.414 |
24.599 |
24.030 |
14.981 |
0.000 |
-14.98 |
-24.03 |
-24.599 |
-18.57 |
-9.61 |
|
|
0.00 |
12.28 |
22.17 |
27.31 |
-107.8 |
-67.79 |
0.00 |
-139.2 |
-224.3 |
-95.31 |
-73.61 |
-38.8 |
|
|
0.00 |
8.21 |
14.83 |
18.26 |
-72.09 |
-45.33 |
0.00 |
-93.12 |
-150.0 |
-63.73 |
-49.22 |
-25.9 |






 ,
мм
,
мм
