

1 билет
Механическим
движением тела называется изменение
положения тела в пространстве относительно
других тел с течением времени. При
рассмотрении вопросов, связанных с
движением тел, можно не принимать во
внимание размеры тела. Тело, размерами
которого в данных условиях можно
пренебречь, называют материальной
точкой. Положение
тела (точки) в пространстве можно
определить относительно какого-либо
другого тела, выбранного за тело отсчета
A. Тело
отсчета, связанная с ним система координат
и часы составляют систему
отсчета.Характеристики
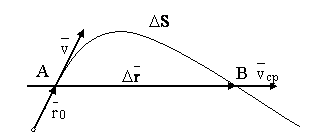
механического движения тела: траектория (линия,
вдоль которой движется тело)
, перемещение (направленный
отрезок прямой, соединяющий начальное
положение тела M1 с
его последующим положением M2) ,
скорость(отношение
перемещения ко времени движения - для
равномерного движения) . Характеристики
механического движения относительны,
т.е. они могут быть различными в разных
системах отсчета. Например, за движением
лодки следят два наблюдателя: один на
берегу в точке O, другой
- на плоту в точке O1 (см.
рис.) . Проведем мысленно через
точку О систему
координат XOY - это неподвижная система
отсчета. Другую систему X'O'Y' свяжем с
плотом - это подвижная система координат.
Относительно системы X'O'Y' (плота) лодка
за время t совершает перемещение ![]() и
будет двигаться со скоростью
и
будет двигаться со скоростью ![]() .
Относительно системы XOY(берег) лодка за
это же время совершит перемещение
.
Относительно системы XOY(берег) лодка за
это же время совершит перемещение ![]() ,
, ![]() ,
где
,
где ![]() -
перемещение плота относительно берега.
Скорость
-
перемещение плота относительно берега.
Скорость ![]() лодки
относительно берега
лодки
относительно берега ![]() или
или ![]() .
Скорость тела относительно неподвижной
системы координат равна геометрической
сумме скорости тела относительно
подвижной системы и скорости этой
системы относительно неподвижной.
.
Скорость тела относительно неподвижной
системы координат равна геометрической
сумме скорости тела относительно
подвижной системы и скорости этой
системы относительно неподвижной.
2 билет
Положение тел в пространстве задается только относительно других тел. Поэтому положение тела относительно разных тел и связанных с ними систем координат будет разным. Так же в разных системах отсчета перемещения и скорость тела будут разными. Например, водитель автомобиля движется относительно дороги, а относительно салона автомобиля находится в покое; ученик на уроке относительно стула находится в покое, но движется вместе с Землей вокруг Солнца.
Скорость тела относительно неподвижной системы отсчета равна геометрической сумме скорости тела относительно подвижной системы и скорости подвижной системы относительно неподвижной. Предположим, что пассажир движется в вагоне поезда, который тоже движется. Для того чтобы найти скорость пассажира относительно земли, необходимо векторно прибавить скорость пассажира относительно вагона и скорость поезда относительно земли.
Перемещения относительно неподвижной системы отсчета равна геометрической сумме перемещения тела относительно подвижной системы и перемещения подвижной системы относительно неподвижной.
Относительностью движения достаточно интересно пользуются для пополнения горючим баков самолета в воздухе. Несмотря на то что относительно поверхности земли, атмосферного воздуха самолеты мчатся со скоростями несколько сотен километров в час, друг друга самолеты находятся в покое.
3 билет
Движение, при котором за равные промежутки времени тело совершает неравные перемещения называют неравномерным или переменным. Средней скоростью vсрназывается величина, равная отношению перемещения тела ∆r за некоторый промежуток времени ∆t к этому промежутку:
![]()
Модуль средней скорости определяется как отношение пути ∆S, пройденного телом за некоторый промежуток времени, к этому промежутку:
![]()
|
Направление вектора средней скорости vсрсовпадает с направлением ∆r (рисунок 1.2). При неограниченном уменьшении ∆t, vсрстремится к предельному значению, которое называетсямгновенной скоростью. Итак, мгновенная скорость vесть предел, к которому стремится средняя скорость vср, когда промежуток времени движения стремится к нулю:
|
|
Из курса математики известно, что предел отношения приращения функции к приращению аргумента, когда последний стремится к нулю представляет собой первую производную этой функции по данному аргументу. Поэтому:
![]()
Мгновенная скорость v есть векторная величина, равная первой производной радиуса - вектора движущейся точки по времени. Так как секущая в пределе совпадает с касательной, то вектор скорости v направлен по касательной к траектории в сторону движения (рисунок 1.2).
По мере уменьшение ∆t путь ∆S все больше будет приближаться к |∆r|, поэтому модуль мгновенной скорости:
![]()
Таким образом, модуль мгновенной скорости v равен первой производной пути по времени :
![]()
При неравномерном движении тела его скорость непрерывно изменяется. Как быстро изменяется скорость тела, показывает величина, которая называется ускорением. Средним ускорением неравномерного движения в интервале от t до t + ∆t называется векторная величина, равная отношению изменения скорости ∆v к интервалу времени ∆t:
![]()
Мгновенным ускорением а в момент времени t будет предел среднего ускорения:
![]()
Таким образом, ускорение ∆а есть векторная величина, равная первой производной скорости по времени. В данной системе отсчета вектор ускорения может быть задан проекциями на соответствующие координатные оси (проекциями ах, ау, аz).
Составляющая аτ вектора ускорения, направленная вдоль касательной к траектории в данной точке, называется тангенциальным (касательным) ускорением. Тангенциальное ускорение характеризует изменение вектора скорости по модулю. Вектор аτ направлен в сторону движения точки при возрастании ее скорости (рисунок 1.3 - а) и в противоположную сторону - при убывании скорости (рисунок 1.3 - б).
|
|
|
|
Рисунок 1.3 | |
 а)
а)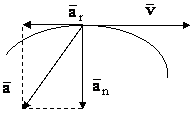 б)
б)
Тангенциальная составляющая ускорения аτ равна первой производной по времени от модуля скорости, определяя тем самым быстроту изменения скорости по модулю:
![]()
Вторая составляющая ускорения, равная:
![]()
называется нормальной составляющей ускорения и направлена по нормали к траектории к центру ее кривизны (поэтому ее называют так же центростремительнымускорением).
Полное ускорение есть геометрическая сумма тангенциальной и нормальной составляющих:

Пример 1. Пусть х возрастает пропорционально квадрату времени, т.е. х = А·t2. Чему равна мгновенная скорость в момент времени t1 - ?
Дано:
х = А·t2;
v - ?
Решение: В общем случае производная от степенной функции tn записывается в виде:
![]()
Мгновенная скорость определяется:
![]()
Ответ: В момент времени t1 имеем v = 2·а·t1.
Пример 2. Зависимость пройденного телом пути S от времени t задается уравнением S = At - Bt2 + Ct3, где А = 2 м/с, В = 3 м/с2, С = 4 м/с3.
Найти: а) зависимость скорости v и ускорения a тела от времени t;
б) расстояние S, скорость v и ускорение а тела через время t =2 с после начала движения.
Дано:
S = At - Bt2 + Ct3, А = 2 м/с, В = 3 м/с2, С = 4 м/с3;
а) v(t) -?, a(t) -?
б) S -? , V -? , a-? при t = 2 c.
Решение:
а) Скорость тела: v = ds /dt ; v = A - 2Bt + 3Ct2; v = 2 - 6t + 12t2 м/с. Ускорение тела: а = dv /dt; а= - 2B + 6Сt; a = - 6 + 24t м/с2.
б) Расстояние, пройденное телом, S = 2t - 3t2 + 4t3. Тогда через время t = 2c имеем: S = 24 м; v = 38 м/с; а = 42 м/с2.
Ответ: v = 2 - 6t + 12t2; a = - 6 + 24 t м/с2; S = 24 м; v = 38 м/с; а = 42 м/с2.
4 билет
Движение, при котором скорость тела за любые равные промежутки времени изменяется на одно и то же значение, называют равноускоренным.
Например, если за каждые 2 с скорость тела изменялась на 4 м/с, то движение тела является равноускоренным. Модуль скорости при таком движении может как увеличиваться, так и уменьшаться.
2. Пусть в начальный момент времени t0 = 0 скорость тела равна v0. В некоторый момент времени t она стала равной v. Тогда изменение скорости за промежуток времени t – t0 = t равно v– v0, а за единицу времени — . Это отношение называется ускорением. Ускорение характеризует быстроту изменения скорости .
Ускорением тела при равноускоренном движении называют векторную физическую величину, равную отношению изменения скорости тела к промежутку времени, за который это изменение произошло.
5 Билет
Свободным падением тел называют падение тел на Землю в отсутствие сопротивления воздуха (в пустоте). В конце XVI века знаменитый итальянский ученый Г. Галилей опытным путем с доступной для того времени точностью установил, что в отсутствие сопротивления воздуха все тела падают на Землю равноускоренно, и что в данной точке Земли ускорение всех тел при падении одно и то же. До этого в течение почти двух тысяч лет, начиная с Аристотеля, в науке было принято считать, что тяжелые тела падают на Землю быстрее легких.
Ускорение,
с которым падают на Землю тела,
называетсяускорением
свободного падения.
Вектор ускорения свободного падения
обозначается символом ![]() он
направлен по вертикали вниз. В различных
точках земного шара в зависимости от
географической широты и высоты над
уровнем моря числовое значениеg оказывается
неодинаковым, изменяясь примерно
от9,83 м/с2 на
полюсах до 9,78 м/с2 на
экваторе. На широте Москвыg = 9,81523 м/с2.
Обычно, если в расчетах не требуется
высокая точность, то числовое значение g у
поверхности Земли принимают
равным 9,8 м/с2 или
даже 10 м/с2.
он
направлен по вертикали вниз. В различных
точках земного шара в зависимости от
географической широты и высоты над
уровнем моря числовое значениеg оказывается
неодинаковым, изменяясь примерно
от9,83 м/с2 на
полюсах до 9,78 м/с2 на
экваторе. На широте Москвыg = 9,81523 м/с2.
Обычно, если в расчетах не требуется
высокая точность, то числовое значение g у
поверхности Земли принимают
равным 9,8 м/с2 или
даже 10 м/с2.
Простым примером свободного падения является падение тела с некоторой высоты h без начальной скорости. Свободное падение является прямолинейным движением с постоянным ускорением. Если направить координатную ось OY вертикально вверх, совместив начало координат с поверхностью Земли, то для анализа свободного падения без начальной скорости можно использовать формулу, положив υ0 = 0, y0 = h, a = –g. Обратим внимание на то, что если тело при падении оказалось в точке с координатой y < h, то перемещение s тела равно s = y – h < 0. Эта величина отрицательна, так как тело при падении перемещалось навстречу выбранному положительному направлению оси OY. В результате получим:
|
υ = –gt. |
Скорость отрицательна, так как вектор скорости направлен вниз.
|
|
Время падения tп тела на Землю найдется из условия y = 0:
|

Скорость тела в любой точке составляет:
|
|
В частности, при y = 0 скорость υп падения тела на Землю равна
|
Пользуясь этими формулами, можно вычислить время падения тела с данной высоты, скорость падения тела в любой момент после начала падения и в любой точке его траектории и т. д.
Аналогичным образом решается задача о движении тела, брошенного вертикально вверх с некоторой начальной скоростьюυ0. Если ось OY по-прежнему направлена вертикально вверх, а ее начало совмещено с точкой бросания, то в формулах равноускоренного прямолинейного движения следует положить:y0 = 0, υ0 > 0, a = –g. Это дает:
|
υ = υ0 – gt. |
Через время υ0 / g скорость тела υ обращается в нуль, т. е. тело достигает высшей точки подъема. Зависимость координаты y от времени t выражается формулой
|
|
Тело возвращается на землю (y = 0) через время 2υ0 / g, следовательно, время подъема и время падения одинаковы. Во время падения на землю скорость тела равна –υ0, т. е. тело падает на землю с такой же по модулю скоростью, с какой оно было брошено вверх.
6 билет
Среди различных видов криволинейного движения особый интерес представляет равномерное движение тела по окружности. Это самый простой вид криволинейного движения. Вместе с тем любое сложное криволинейное движение тела на достаточно малом участке его траектории можно приближенно рассматривать как равномерное движение по окружности.
Центростремительное
ускорение. При
равномерном движении по окружности
значение скорости остается постоянным,
а направление вектора скорости ![]() изменяется
в процессе движения. Определим ускорение
тела, движущегося равномерно по окружности
радиусомR. За
интервал времени Δt тело
проходит путь
изменяется
в процессе движения. Определим ускорение
тела, движущегося равномерно по окружности
радиусомR. За
интервал времени Δt тело
проходит путь ![]() .
.
Этот
путь Δs равен
длине дуги АВ (рис.
17).Векторы
скоростей ![]() и
и![]() точкахА и Внаправлены
по касательным к окружности в этих
точках, угол α
между
векторами
точкахА и Внаправлены
по касательным к окружности в этих
точках, угол α
между
векторами ![]() и
и![]() равен
углу между радиусамиОА иOB.
равен
углу между радиусамиОА иOB.
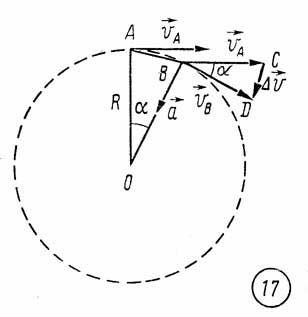
Для
нахождения вектора ускорения ![]() нужно
найти разность векторов скорости
нужно
найти разность векторов скорости![]() и
определить отношение изменения скорости
к малому интервалу времениΔt,
за который произошло это изменение:
и
определить отношение изменения скорости
к малому интервалу времениΔt,
за который произошло это изменение:
![]() .
.
Из подобия треугольников ОАВ и BCDследует
![]() .(3.1)
.(3.1)
Если
интервал времени Δt мал,
то мал и угол α.
При
малых значениях угла α
длина
хорды АВ примерно
равна длине дуги АВ,
т. е. ![]() .
Так как
.
Так как![]() ,
,![]() и
и![]() ,
то из выражения (3.1) получаем
,
то из выражения (3.1) получаем
![]() ,(3.2)
,(3.2)
![]() .
(3.3)
.
(3.3)
Поскольку
![]() ,
(3.4)
,
(3.4)
из выражений (3.3) и (3.4) получаем
![]() .
(3.5)
.
(3.5)
Из
рисунка 17 видно, что, чем меньше угол α,
тем
ближе направление вектора ![]() к
направлению на центр окружности. Так
как вектор ускорения равен
к
направлению на центр окружности. Так
как вектор ускорения равен![]() отношению
вектора
отношению
вектора![]() к
интервалу времениΔt при
условии, что интервал времени Δt очень
мал, то вектор ускорения при равномерном
движении по окружности направлен к ее
центру.
к
интервалу времениΔt при
условии, что интервал времени Δt очень
мал, то вектор ускорения при равномерном
движении по окружности направлен к ее
центру.
При изменении положения тела на окружности меняется направление на центр окружности. Следовательно, при равномерном движении тела по окружности модуль ускорения имеет постоянное значение, но направление вектора ускорения изменяется со временем. Ускорение при равномерном движении по окружности называется центростремительным ускорением.
Период
и частота. Промежуток
времени, за который тело совершает
полный оборот при движении по окружности,
называется периодом. Период обращения
тела по окружности обозначается буквой T.
Так как длина окружности s равна 2πR,
период обращения при равномерном
движении тела со скоростью ![]() по
окружности радиусомR равняется
по
окружности радиусомR равняется
![]() .
(3.6)
.
(3.6)
Величина, обратная периоду обращения, называется частотой обращения. Частота обращения обозначается греческой буквой «ню» (ν) и показывает, сколько оборотов по окружности совершает тело в единицу времени:
![]() или
или ![]() (3.7)
(3.7)
Единица частоты — 1/с.
Используя формулы (3.5), (3.6) и (3.7), можно получить формулы для вычисления центростремительного ускорения:
![]() (3.8)
(3.8)
и
![]() .
(3.9)
.
(3.9)
7 билет Произвольное криволинейное движение:a = a тангенсальное = dv / dt = v ‘ ( t )0) delta s / delta t = v (ст.2) / ra нормальное = v / r * lim (при delta t Причем r в выражении – это не радиус окружности, а радиус кривизны траектории в этой точку.
Любое
криволинейное движение можно представить
как движение по дугам окружностей.  При
произвольном криволинейном движении
скорость может меняться как по модулю,
так и по направлению. Ускорение так же
является величиной переменной:
При
произвольном криволинейном движении
скорость может меняться как по модулю,
так и по направлению. Ускорение так же
является величиной переменной: ![]() При
криволинейном движении ускорение можно
разложить на две составляющие:
При
криволинейном движении ускорение можно
разложить на две составляющие: ![]()
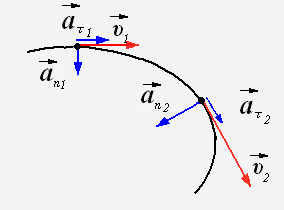 где
первое слагаемое - нормальная
составляющая ускорения,
второе слагаемое - тангенсальная
составляющая ускорения. Модуль
полного ускорения равен:
где
первое слагаемое - нормальная
составляющая ускорения,
второе слагаемое - тангенсальная
составляющая ускорения. Модуль
полного ускорения равен:  Модули
нормального и тангенсального ускорений
соответственно равны:
Модули
нормального и тангенсального ускорений
соответственно равны: ![]() где
V - производная модуля скорости по
времени.
где
V - производная модуля скорости по
времени.
8 билет
Динамикой называют раздел механики, в котором изучают различные виды механических движений с учетом взаимодействия тел между собой. Основы динамики составляют три закона Ньютона, являющиеся результатом обобщения наблюдений и опытов в области механических явлений, которые были известны еще до Ньютона и осуществлены самим Ньютоном.
Законы динамики Ньютона (иначе называемой классической динамикой) имеют ограниченную область применимости. Они справедливы для макроскопических тел, движущихся со скоростями, много меньшими, чем скорость света в вакууме.
К выводу о существовании явления инерции впервые пришел Галилей, а затем Ньютон. Этот вывод формулируется в видепервого закона Ньютона (закона инерции): существуют такие системы отсчета, относительно которых тело (материальная точка) при отсутствии на нею внешних воздействий (или при их взаимной компенсации) сохраняет состояние покоя или равномерного прямолинейного движения.
Системы отсчета, в которых выполняется первый закон Ньютона, называют инерциальными. Следовательно, инерциальными являются такие системы отсчета, относительно которых материальная точка при отсутствии на нее внешних воздействий или их взаимной компенсации покоится или движется равномерно и прямолинейно.
Наблюдения показывают, что с очень высокой степенью точности можно считать инерциальной системой отсчета гелиоцентрическую систему, у которой начало координат связано с Солнцем, а оси направлены на определенные "неподвижные" звезды. Системы отсчета, жестко связанные с поверхностью Земли, строго говоря, не являются инерциальными, так как Земля движется по орбите вокруг Солнца и при этом вращается вокруг своей оси. Однако при описании движений, не имеющих глобального (т. е. всемирного) масштаба, системы отсчета, связанные с Землей, можно с достаточной точностью считать инерциальными. Инерциальными являются и системы отсчета, которые движутся равномерно и прямолинейно относительно какой-либо инерциальной системы отсчета (см. далее). Галилей установил, что никакими механическими опытами, поставленными внутри инерциальной системы отсчета, невозможно установить, покоится эта система или движется равномерно и прямолинейно. Это утверждение носит названиепринципа относительности Галилея или механического принципа относительности. Этот принцип был впоследствии развит А. Эйнштейном и является одним из постулатов специальной теории относительности.
Инерциальные системы отсчета играют в физике исключительно важную роль, так как, согласно принципу относительности Эйнштейна, математическое выражение любою закона физики имеет одинаковый вид в каждой инерциальной системе отсчета. В дальнейшем мы будем пользоваться только инерциальными системами (не упоминая об этом каждый раз).
Системы отсчета, в которых первый закон Ньютона не выполняется, называют неинерциальными. К таким системам относится любая система отсчета, движущаяся с ускорением относительно инерциальной системы отсчета.
9 билет
Второй закон Ньютона в его наиболее распространённой формулировке утверждает: в инерциальных системах ускорение, приобретаемое материальной точкой (телом), прямо пропорционально вызывающей его силе, совпадает с ней по направлению и обратно пропорционально массе материальной точки (тела).
10 билет
Первый закон Ньютона Закон инерции Первый закон Ньютона - физический закон, в соответствии с которым: Материальная точка сохраняет состояние покоя или равномерного движения до тех пор, пока внешние воздействия не изменят этого состояния Второй закон Ньютона Основной закон динамики Второй закон Ньютона - физический закон, в соответствии с которым: Ускорение, приобретаемое материальной точкой в инерциальной системе отсчета: - прямо пропорционально действующей на точку (равнодействующей) силе; - обратно пропорционально массе точки; и - направлено в сторону действия силы. Третий закон Ньютона Третий закон Ньютона - физический закон, в соответствии с которым: Силы взаимодействия двух материальных точек в инерциальной системе отсчета: - равны по модулю; - противоположны по направлению; и - действуют вдоль прямой, соединяющей точки.
Сила действия равна силе противодействия.
11 билет
22.1. Закон ГукаСамо существование жидких и твердых тел свидетельствует о наличии сил взаимодействия между молекулами
Эти силы определяются электромагнитными взаимодействиями между движущимися заряженными частицами, из которых состоят атомы и молекулы (электронами и ядрами). Теоретический расчет этих сил чрезвычайно сложен, и в общем виде эта задача не решена до настоящего времени. Однако можно утверждать, что эти силы могут быть как силами притяжения (без сил притяжения все молекулы разлетелись бы из-за их теплового движения), так и силами отталкивания (без которых все тела сжались бы в одну точку). Равновесному положению молекул в жидкости и твердом теле соответствует равенство сил притяжения и отталкивания. При деформации тел (как жидких, так и твердых) равновесные расстояния между молекулами изменяются, поэтому возникают силы, стремящиеся вернуть их в исходное состояние. Эти силы проявляются как силы упругости. Отметим, что силы упругости не относятся к фундаментальным, законы, позволяющие вычислять их значения, как правило, являются экспериментальными и выполняются приближенно. В общем случае зависимость сил упругости от деформации может быть очень сложной, однако при малых деформациях справедлив закон Р. Гука: сила упругости пропорциональна деформация тела и направлена в сторону, противоположную деформации. В простейшем случае деформации растяжения и сжатия (закон Р. Гука) выражается формулой
Fупр = −kx, (1)
где х − изменение длины тела, k − коэффициент пропорциональности (также называемый коэффициентом упругости), зависящий от материала тела, его размеров и формы. Знак минус явно указывает, что сила упругости направлена в сторону, противоположную деформации. Особенно хорошо выполняется этот закон для длинных пружин.Всякий физический закон помимо чисто формальной связи между физическими величинами выражает также и причинно-следственные связи. По этому поводу в связи с силами упругости необходимо высказать следующее замечание. Для того чтобы деформировать тело, к нему необходимо приложить внешнюю силу, тогда возникающие деформации приведут к появлению сил упругости (рис. 121).
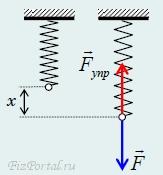
рис. 121
Итак, причиной деформаций являются внешние воздействия, а сами деформации являются причиной сил упругости. Если деформированное тело находится в состоянии равновесия, то возникающая сила упругости Fупроказывается равной по величине и противоположной по направлению внешней силе F. Таким образом, соотношение Fупр = −F справедливо только в состоянии равновесия и является следствием условий равновесия, а не третьего закона Ньютона, как это иногда легкомысленно утверждается. Соотношение между силой упругости и деформацией справедливо независимо от того, находится ли тело в состоянии равновесия.Если к твердому телу приложена внешняя сила, направленная перпендикулярно его поверхности (нормально), то возникающая деформация будет сжатием или растяжением. Если к твердому телу приложить силу, направленную параллельно его поверхности (тангенциально), то возникающая деформация является сдвигом. В обоих случаях возникающая сила упругости направлена в сторону, противоположную внешней силе (рис. 122).
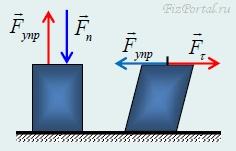
рис. 122
Рассмотренные в данном разделе законы являются приближенными, так при больших деформациях нарушается пропорциональность между силами упругости и деформациями. Кроме того, во многих случаях тело может не восстанавливать свою форму после снятия нагрузки − такие деформации называются пластическими Описание сил упругости в таких ситуациях является весьма сложным (мы познакомимся с этим после подробного изучения свойств твердых тел). Заметим, что более сложные виды деформаций могут быть сведены к простейшим − «растяжению − сжатию» и сдвигу. Силы упругости возникают как в твердых телах, так и в жидкостях и газах. Для жидких тел имеет смысл говорить только о нормальной силе, так как тангенциальные силы приведут к перетеканию жидкости. Вспомните: «твердые тела сохраняют свою форму и объем, а жидкости ее не сохраняют». Поэтому говорят, что в жидкостях отсутствуют тангенциальные силы упругости. Такие свойства жидкости обусловлены ее молекулярным строением: силы взаимодействия между молекулами проявляются только при изменении расстояния между молекулами, сдвиг одной молекулы относительно другой не приводит к появлению допол¬нительного взаимодействия. Отметим, что силы упругости жидкости могут быть направлены как внутрь, так и наружу от жидкости, то есть жидкость может быть как сжата, так и растянута. Так как жидкости при отсутствии внешних воздействий сохраняют свой объем, то существует равновесное расстояние между молекулами, при котором сила их взаимодействия равна нулю. При уменьшении равновесного объема расстояния между молекулами меньше равновесных, поэтому между молекулами начинают возникать силы отталкивания, в противном случае увеличения объема расстояния между молекулами превышают равновесные, поэтому начинают проявляться силы притяжения. Пусть жидкость находится в сосуде под поршнем. Если к поршню приложить силу, направленную наружу от жидкости, то благодаря силам притяжения между молекулами жидкости, а также жидкости и поршня, жидкость окажется растянутой, вследствие чего появятся силы упругости, направленные внутрь жидкости (рис. 124).
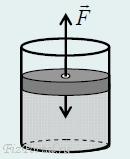
рис. 124
Большинство жидкостей деформируется чрезвычайно мало, то есть для того, чтобы получить заметную деформацию, необходимо приложить значительные внешние силы, и наоборот − малые деформации жидкости приводят к возникновению больших сил упругости. Во многих случаях связь между деформациями и силами упругости жидкостей может считаться линейной, соответствующей закону Гука.
12 билет
Рассмотрим гравитационное взаимодействие между однородной сферой радиуса R, и массы М и материальной точкой массы m, находящейся на расстоянии r от центра сферы (рис. 116).

рис. 116
В соответствии с вышеизложенной методикой расчета сил, необходимо разбить сферу на малые участки и просуммировать силы, действующие на материальную точку со стороны всех участков сферы. Такое суммирование впервые было проведено И. Ньютоном. Не вдаваясь в математические тонкости проведенного расчета, приведем окончательный результат: результирующая сила направлена к центру шара (что вполне очевидно), а величина этой силы определяется формулой

Иными словами, сила взаимодействия оказалась такой же, как сила взаимодействия двух точечных тел, одно из которых помещено в центр сферы и его масса равна массе сферы. Существенным в этом расчете оказалось то обстоятельство, что сила гравитационного взаимодействия обратно пропорциональна квадрату расстояния между точечными телами, при любой другой зависимости силы от расстояния приведенный результат расчета оказался бы неверным. Полученный вывод очевидным образом обобщается на взаимодействие точечного заряда и однородного шара. Для доказательства достаточно разбить шар на тонкие сферические слои. Аналогично можно показать, что сила гравитационного взаимодействия между двумя сферически симметричными телами равна силе взаимодействия между материальными точками таких же масс, расположенных в центрах тел. То есть при расчете гравитационного взаимодействия сферически симметричные тела можно считать материальными точками, расположенными в центрах этих тел, независимо от размеров самих тел и расстояния между ними (рис. 117).
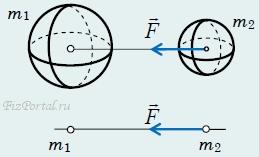
рис. 117
Применим полученные результат к силе, действующей на все тела, находящиеся у поверхности Земли. Пусть тело массой mнаходится на высотеh над поверхностью Земли. С хорошей точностью форму Земли можно считать шарообразной, поэтому сила, действующая на тело со стороны Земли, направлена к ее центру, а модуль этой силы выражается формулой

где М − масса Земли,R − ее радиус. Известно, что средний радиус Земли равен: R ≈ 6350 км. Если тело находится на небольших высотах по сравнению с радиусом Земли, то высотой подъема тела можно пренебречь и в этом случае сила притяжения оказывается равной:

где обозначено

Гравитационная сила, действующая на все тела у поверхности Земли, называется силой тяжести. Векторы ускорения свободного падения в различных точках не параллельны, так как направлены к центру Земли. Однако если рассматривать точки, находящиеся на небольшой, по сравнению с радиусом Земли, высоте, то можно пренебречь различием в направлениях ускорения свободного падения и считать, что во всех точках рассматриваемой области вблизи поверхности Земли вектор ускорения постоянен как по величине, так и по направлению (рис. 118).
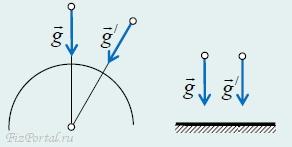
рис. 118
В рамках такого приближения мы будем называть силу тяжести однородной.
Задания для самостоятельной работы1. Оцените, на какой высоте над поверхностью Земли ускорение свободного падения уменьшается на 1 %по сравнению с ускорением на поверхности Земли.2. На каком расстоянии у поверхности земли угол между векторами ускорений свободного падения равен 1°?
Строго говоря, модуль ускорения свободного падения различен в различных точках земной поверхности. Эти различия обусловлены, во-первых, отличием формы Земли от шарообразной, во-вторых, непостоянством плотности Земли. Заметим, что при определении ускорения свободного падения необходимо принимать во внимание вращение Земли, которое приводит к уменьшению экспериментально наблюдаемого значения ускорения по сравнению с формулой g = GM/R2.Кроме того, вращение Земли также приводит к отклонению направления ускорения свободного падения от направления на центр Земли. В некоторых случаях эти поправки, связанные с вращением Земли, включают в силу тяжести. Мы же, однако, предпочитаем называть силой тяжести только ту силу, которая вызвана гравитационным взаимодействием, а экспериментально наблюдаемые малые поправки к законам движения, вызванные вращением Земли, рассматривать отдельно, тем более что они малы и очень часто ими можно пренебречь. Сила тяжести, действующая на тело, является суммой сил, действующей на его отдельные части. Если считать силу тяжести однородной, то суммарная сила тяжести, действующая на тело, равна произведению массы всего тела на ускорение свободного падения. Более сложным является вопрос точки приложения силы тяжести. По своей природе сила тяжести является распределенной, действующей на все части тела. Если нас интересует только величина суммарной силы тяжести, то ее точка приложения нас не интересует. Однако во многих случаях (например, при исследовании условий равновесия) нас интересует не только сама сила, но и ее момент. Можно выбрать такую точку приложен ия суммарной силы тяжести, чтобы ее момент был равен сумме моментов сил тяжести, действующей на отдельные части тела. Такая точка называется центром тяжести тела.Очередной раз мысленно разобьем тело массой т на малые части, массы которых обозначим Δmi (i = 1, 2, 3 ...) (рис. 119).

рис. 119
Выберем такую точку С приложения суммарной силы тяжести mg, чтобы момент этой силы относительно произвольной оси Обыл равен сумме моментов сил тяжести, действующих на отдельные частиΔmi (i = 1, 2, 3 ...), что математически выражается виде тождества
mgxc = Δm1х1 + Δm2х2 + Δm3х3 + …,
где х1, х2, х3 … − горизонтальные координаты частей тела, х1 − горизонтальная координата искомой точки приложения суммарной силы тяжести. Из данного выражения определяем координату центра тяжести:
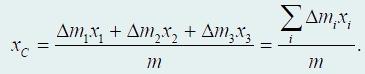
Таким образом, если вектор ускорения свободного падения принимается постоянным, то центр тяжести совпадает с центром масс тела. Отметим, что в общем случае, когда вектор ускорения по величине или направлению изменяется от точки к точке, положение центра тяжести может отличаться от положения центра масс.
13 билет
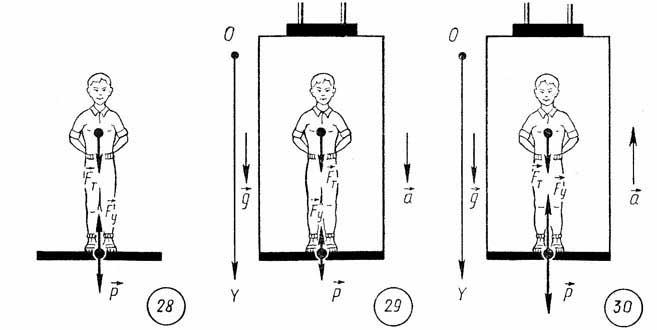
Вес тела. В технике и быту широко используется понятие веса тела.
Весом тела называют силу, с которой тело вследствие его притяжения к Земле действует на горизонтальную опору или подвес.
Вес
тела ![]() ,
т. е. сила, с которой тело действует на
опору, и сила упругости
,
т. е. сила, с которой тело действует на
опору, и сила упругости ![]() ,
с которой опора действует на тело (рис.
28), в соответствии с третьим законом
Ньютона равны по модулю и противоположны
по направлению:
,
с которой опора действует на тело (рис.
28), в соответствии с третьим законом
Ньютона равны по модулю и противоположны
по направлению:
![]() .
(10.1)
.
(10.1)
Если
тело находится в покое на горизонтальной
поверхности или равномерно движется и
на него действуют только сила тяжести ![]() и
сила упругости
и
сила упругости ![]() со
стороны опоры, то из равенства нулю
векторной суммы этих сил следует
равенство
со
стороны опоры, то из равенства нулю
векторной суммы этих сил следует
равенство
![]() .
(10.2)
.
(10.2)
Сопоставив выражения (10.1) и (10.2), получим
![]() ,
(10.3)
,
(10.3)
т.
е. вес ![]() тела
на неподвижной или равномерно движущейся
горизонтальной опоре равен силе
тяжести
тела
на неподвижной или равномерно движущейся
горизонтальной опоре равен силе
тяжести ![]() ,
но приложены эти силы к разным телам.
,
но приложены эти силы к разным телам.
При
ускоренном движении тела и опоры
вес ![]() будет
отличаться от силы тяжести
будет
отличаться от силы тяжести ![]() .
.
По
второму закону Ньютона при движении
тела массой ![]() под
действием силы тяжести
под
действием силы тяжести ![]() и
силы упругости
и
силы упругости ![]() с
ускорением
с
ускорением ![]() выполняется
равенство
выполняется
равенство
![]() .
(10.4)
.
(10.4)
Из
уравнений (10.1) и (10.4) для веса ![]() получаем
получаем
![]() ,
(10.5)
,
(10.5)
или
![]() .
(10.6)
.
(10.6)
Рассмотрим
случай движения лифта, когда
ускорение ![]() направлено
вертикально вниз. Если координатную
осьOY направить
вертикально вниз, то векторы
направлено
вертикально вниз. Если координатную
осьOY направить
вертикально вниз, то векторы ![]() ,
, ![]() и
и ![]() оказываются
параллельными оси OY (рис.
29), а их проекции положительными; тогда
уравнение (10.6) примет вид
оказываются
параллельными оси OY (рис.
29), а их проекции положительными; тогда
уравнение (10.6) примет вид
![]() .
.
Так как проекции положительны и параллельны координатной оси, их можно заменить модулями векторов:
![]() .
(10.7)
.
(10.7)
Вес тела, направление ускорения которого совпадает с направлением ускорения свободного падения, меньше веса покоящегося тела.
Невесомость. Если тело вместе с опорой свободно падает, то a = g, и из формулы (10.7) следует, что P = 0.
Исчезновение веса при движении опоры с ускорением свободного падения называется невесомостью.
Состояние невесомости наблюдается в самолете или космическом корабле при движении с ускорением свободного падения независимо от направления и значения модуля скорости их движения. За пределами земной атмосферы при выключении реактивных двигателей на космический корабль действует только сила всемирного тяготения. Под действием этой силы космический корабль и все тела, находящиеся в нем, движутся с одинаковым ускорением; поэтому в корабле наблюдается явление невесомости.
Перегрузка. При ускоренном движении тела и опоры с ускорением, направленным вертикально вверх (рис. 30), вес тела оказывается больше действующей на него силы тяжести.
В
этом случае проекции ![]() и
и ![]() положительны,
а проекция
положительны,
а проекция ![]() отрицательна.
Поэтому для модуля веса тела получаем
выражение
отрицательна.
Поэтому для модуля веса тела получаем
выражение
![]() .
(10.8)
.
(10.8)
Увеличение веса тела, вызванное ускоренным движением опоры или подвеса, называют перегрузкой.Действие перегрузки испытывают на себе космонавты как при взлете космической ракеты, так и на участке торможения космического корабля при входе в плотные слои атмосферы. Испытывают перегрузки и летчики при выполнении фигур высшего пилотажа, и водители автомобилей при движении с большими ускорениями.
14 билет
Еще одним проявлением межмолекулярных взаимодействий являются силы трения скольжения − силы, возникающие при относительном движении двух тел и направленные вдоль границы их соприкосновения (рис. 128).

рис. 128
Одна из причин появления трения очевидна: поверхности взаимодействующих тел не являются идеально гладкими, микроскопические выступы и впадины зацепляются друг за друга, в них возникают силы упругости, направленные вдоль поверхности соприкосновения (рис. 129).

рис. 129
Однако только эта причина не объясняет всех свойств и характеристик трения. В частности, для большинства веществ улучшение полировки поверхностей приводит не к уменьшению, а увеличению трения. Для шероховатых поверхностей площадь реального контакта, где действуют межмолекулярные силы прилипания, невелика (эти участки располагаются в районах выступов), при полировке поверхностей площади этих областей увеличиваются, что и приводит к увеличению сил трения. Рассматриваемое здесь явление называют также сухим трением. Следует отметить, что законченная теория сил сухого трения до настоящего времени не построена. Поэтому законы, описывающие рассматриваемый вид взаимодействия, носят экспериментальный (эмпирический) характер. Наиболее простой вид закона, описывающего силу трения скольжения, установлен экспериментально и носит название закона Кулона-Амонтона. Это закон утверждает, что сила трения скольжения пропорциональна силе нормальнойреакции1взаимодействующих тел и направлена в сторону, противоположную скорости относительного движения тел (рис. 130):
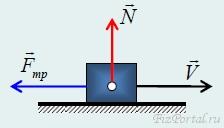
рис. 130
Fmp = μN, (1)
безразмерный коэффициент пропорциональности (называемый коэффициент трения)μ зависит от материала соприкасающихся поверхностей и степени их обработки. Как правило, этот коэффициент определяется экспериментально. Как уже было отмечено, закон Кулона-Амонтона приближенный: так, коэффициент трения может незначительно зависеть от скорости, причем, как правило, с ростом скорости коэффициент трения незначительно уменьшается. Из приведенного закона следует, что сила трения не зависит от площади соприкасающихся тел, экспериментально же такая зависимость иногда наблюдается. Однако эти указанные особенности незначительно влияют на величину силы трения, поэтому чаще ими пренебрегают и пользуются приближенной формулой (1). Подчеркнем, что, как любая другая сила, сила трения является характеристикой взаимодействия тел, поэтому в соответствии с третьим законом Ньютона следует говорить о силах трения, действующих на каждое из соприкасающихся тел.В заключение укажем еще одну интерпретацию коэффициента сухого трения. При движении одного тела по поверхности другого суммарная сила взаимодействия тел Fреакразлагается на силу нормальной реакцииN и силу трения Fmp(рис. 131).
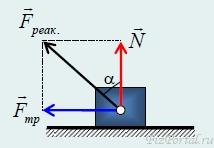
рис. 131
Если величина силы трения определяется формулой (1), то угол α между суммарной силой реакции и нормалью к поверхности удовлетворяет условию tgα = μ.Сила трения может возникнуть и в том случае, когда тела не движутся друг относительно друга. Такую силу называют силой трения покоя. Повседневный опыт указывает, что для того чтобы сдвинуть одно тело относительно другого, необходимо приложить силу, превышающую определенное пороговое значение (вспомните, например, свои опыты по перетаскиванию мебели). Если же к телу приложить силу меньшую, то тело остается в покое, следовательно, эта приложенная сила Fкомпенсируется равной ей силой трения покоя. Таким образом, сила трения покоя может принимать максимальное значение, после чего трение покоя переходит в трение скольжения. Приближенно можно считать, что максимальная сила трения покоя равна силе трения скольжения и определяется формулой (1).Однако, как правило, максимальная сила трения покоя превышает силу трения скольжения на 10 − 20 %, поэтому в некоторых случаях вводят коэффициент трения покоя, незначительно превышающих коэффициент трения скольжения. В дальнейшем этим различием мы будем пренебрегать.Рассмотрим подробнее простую ситуацию: на горизонтальной поверхности расположен небольшой брусок, к которому прикладывают внешнюю горизонтально направленную силу F(рис. 132).
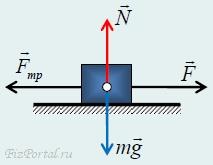
рис. 132
Действующая на брусок сила тяжести mg приводит к незначительной деформации поверхности, что вызывает появление силы реакции N. Если горизонтальная силаF не превышает по модулю максимально возможную силу трения покоя μN, то сила трения (покоя) численно равна приложенной силе и направлена в противоположную сторону. Как только модуль силы Fпревысит значениеμN, начнется скольжение бруска, при котором сила трения будет оставаться приблизительно постоянной. Аналогичная ситуация будет наблюдаться при изменении направления действия внешней силы. Таким образом, график зависимости проекции силы трения от внешней приложенной силы имеет вид, показанный на рис. 133.
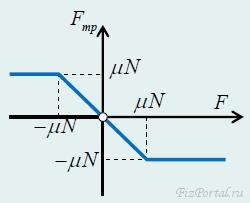
рис. 133
Силы, препятствующие движению, наблюдаются и при качении одного тела по поверхности другого. Эти силы называются силами трения качения. Сразу подчеркнем, что природа этих сил отличается от сил сухого трения. Основной причиной возникновения трения качения являются неупругие деформации самого катящегося тела и поверхности, по которой происходит качение. Так, колесо, расположенное на горизонтальной поверхности, деформирует последнюю. При движении колеса деформации не успевают восстановиться, поэтому колесу приходится как бы все время взбираться на небольшую горку, из-за чего появляется момент сил, тормозящий качение (рис. 134).

рис. 134
Неупругие деформации колеса также приводят к появлению тормозящих сил. Таким образом, силы трения качения определяются упругими свойствами взаимодействующих тел. Закон для силы трения также является экспериментальным и приближенным, его принято записывать в форме

где N − сила нормальной реакции,R − радиус катящегося тела, k− коэффициент трения качения, имеющий размерность длины. При записи формулы в такой форме коэффициент трения качения определяется, главным образом, материалом взаимодействующих тел и не зависит от радиуса катящегося тела. Заметим, что для одних и тех же тел трение качения, как правило, во много раз меньше трения скольжения, что хорошо известно из повседневного опыта (рис. 135).
рис. 135
1Заметим, что записывать этот закон в векторной форме
![]()
как это делается в некоторых справочниках, недопустимо, так как силы нормальной реакции и трения взаимно перпендикулярны.
15 билет
Простые
наблюдения и опыты доказывают, что покой
и движение относительны, скорость тела
зависит от выбора системы отсчета; по
второму закону Ньютона независимо от
того, находилось ли тело в покое или
двигалось, изменение скорости его
движения может происходить только под
действием силы, т. е. в результате
взаимодействия с другими телами. Однако
существуют величины, которые могут
сохраняться при взаимодействии тел.
Такими величинами являются энергия и
импульс.
Импульсом тела называют векторную
физическую величину, являющуюся
количественной характеристикой
поступательного движения тел. Импульс
обозначается р. Импульс тела равен
произведению массы тела на его скорость:
р = mv. Направление вектора импульса р
совпадает с направлением вектора
скорости тела 0. Единица измерения
импульса — кг • м/с.
Для импульса системы тел выполняется
закон сохранения, который справедлив
только для замкнутых физических систем.
В общем случае замкнутой называют
систему, которая не обменивается энергией
и массой с телами и полями, не входящими
в нее. В механике замкнутой называют
систему, на которую не действуют внешние
силы или действие этих сил скомпенсировано.
В этом случае p1 = р2, где pl — начальный
импульс системы, а р2 — конечный. В случае
двух тел, входящих в систему, это выражение
имеет вид m1v1 + m2v2 = m1"v1" + m2"v2" ,
где ml и m2 — массы тел, а v1 и v2 — скорости
до взаимодействия, v1" и v2" — скорости
после взаимодействия (рис.
5).  Эта формула и является математическим
выражением закона сохранения импульса:
импульс замкнутой физической системы
сохраняется при любых взаимодействиях,
происходящих внутри этой системы.
Другими словами: в замкнутой физической
системе геометрическая сумма импульсов
тел до взаимодействия равна геометрической
сумме импульсов этих тел после
взаимодействия. В случае незамкнутой
системы импульс тел системы не сохраняется.
Однако если в системе существует
направление, по которому внешние силы
не действуют или их действие скомпенсировано,
то сохраняется проекция импульса на
это направление. Кроме того, если время
взаимодействия мало (выстрел, взрыв,
удар), то за это время даже в случае
незамкнутой системы внешние силы
незначительно изменяют импульсы
взаимодействующих тел. Поэтому для
практических расчетов в этом случае
тоже можно применять закон сохранения
импульса.
Экспериментальные исследования
взаимодействий различных тел — от
планет и звезд до атомов и элементарных
частиц — показали, что в любой системе
взаимодействующих тел при отсутствии
действия со стороны других тел, не
входящих в систему, или равенстве нулю
суммы действующих сил геометрическая
сумма импульсов тел действительно
остается неизменной.
В механике закон сохранения импульса
и законы Ньютона связаны между собой.
Если на тело массой т в течение времени
t действует сила и скорость его движения
изменяется от v0 до v, то ускорение движения
а тела равно
Эта формула и является математическим
выражением закона сохранения импульса:
импульс замкнутой физической системы
сохраняется при любых взаимодействиях,
происходящих внутри этой системы.
Другими словами: в замкнутой физической
системе геометрическая сумма импульсов
тел до взаимодействия равна геометрической
сумме импульсов этих тел после
взаимодействия. В случае незамкнутой
системы импульс тел системы не сохраняется.
Однако если в системе существует
направление, по которому внешние силы
не действуют или их действие скомпенсировано,
то сохраняется проекция импульса на
это направление. Кроме того, если время
взаимодействия мало (выстрел, взрыв,
удар), то за это время даже в случае
незамкнутой системы внешние силы
незначительно изменяют импульсы
взаимодействующих тел. Поэтому для
практических расчетов в этом случае
тоже можно применять закон сохранения
импульса.
Экспериментальные исследования
взаимодействий различных тел — от
планет и звезд до атомов и элементарных
частиц — показали, что в любой системе
взаимодействующих тел при отсутствии
действия со стороны других тел, не
входящих в систему, или равенстве нулю
суммы действующих сил геометрическая
сумма импульсов тел действительно
остается неизменной.
В механике закон сохранения импульса
и законы Ньютона связаны между собой.
Если на тело массой т в течение времени
t действует сила и скорость его движения
изменяется от v0 до v, то ускорение движения
а тела равно ![]() Ha
основании второго закона Ньютона для
силы F можно записать
Ha
основании второго закона Ньютона для
силы F можно записать ![]() ,
отсюда следует
,
отсюда следует ![]() Ft — векторная физическая величина,
характеризующая действие на тело силы
за некоторый промежуток времени и равная
произведению силы на время ее действия,
называется импульсом силы. Единица
импульса силы в СИ — Н*с.
Закон сохранения импульса лежит в основе
реактивного движения. Реактивное
движение — это такое движение тела,
которое возникает после отделения от
тела его части.
Пусть тело массой т покоилось. От тела
отделилась со скоростью vl какая-то его
часть массой т1. Тогда оставшаяся часть
придет в движение в противоположную
сторону со скоростью D2, масса оставшейся
части т2. Действительно, сумма импульсов
обеих частей тела до отделения была
равна нулю и после разделения будет
равна нулю:
Ft — векторная физическая величина,
характеризующая действие на тело силы
за некоторый промежуток времени и равная
произведению силы на время ее действия,
называется импульсом силы. Единица
импульса силы в СИ — Н*с.
Закон сохранения импульса лежит в основе
реактивного движения. Реактивное
движение — это такое движение тела,
которое возникает после отделения от
тела его части.
Пусть тело массой т покоилось. От тела
отделилась со скоростью vl какая-то его
часть массой т1. Тогда оставшаяся часть
придет в движение в противоположную
сторону со скоростью D2, масса оставшейся
части т2. Действительно, сумма импульсов
обеих частей тела до отделения была
равна нулю и после разделения будет
равна нулю: ![]() Большая
заслуга в развитии теории реактивного
движения принадлежит К. Э.
Циолковскому.
Он разработал теорию полета тела
переменной массы (ракеты) в однородном
поле тяготения и рассчитал запасы
топлива, необходимые для преодоления
силы земного притяжения; основы теории
жидкостного реактивного двигателя, а
также элементы его конструкции; теорию
многоступенчатых ракет, причем предложил
два варианта: параллельный (несколько
реактивных двигателей работают
одновременно) и последовательный
(реактивные двигатели работают друг за
другом). К. Э. Циолковский строго научно
доказал возможность полета в космос с
помощью ракет с жидкостным реактивным
двигателем, предложил специальные
траектории посадки космических аппаратов
на Землю, выдвинул идею создания
межпланетных орбитальных станций и
подробно рассмотрел условия жизни и
жизнеобеспечения на них. Технические
идеи Циолковского находят применение
при создании современной ракетно-космической
техники. Движение с помощью реактивной
струи по закону сохранения импульса
лежит в основе гидрореактивного
двигателя. В основе движения многих
морских моллюсков (осьминогов, медуз,
кальмаров, каракатиц) также лежит
реактивный принцип.
Большая
заслуга в развитии теории реактивного
движения принадлежит К. Э.
Циолковскому.
Он разработал теорию полета тела
переменной массы (ракеты) в однородном
поле тяготения и рассчитал запасы
топлива, необходимые для преодоления
силы земного притяжения; основы теории
жидкостного реактивного двигателя, а
также элементы его конструкции; теорию
многоступенчатых ракет, причем предложил
два варианта: параллельный (несколько
реактивных двигателей работают
одновременно) и последовательный
(реактивные двигатели работают друг за
другом). К. Э. Циолковский строго научно
доказал возможность полета в космос с
помощью ракет с жидкостным реактивным
двигателем, предложил специальные
траектории посадки космических аппаратов
на Землю, выдвинул идею создания
межпланетных орбитальных станций и
подробно рассмотрел условия жизни и
жизнеобеспечения на них. Технические
идеи Циолковского находят применение
при создании современной ракетно-космической
техники. Движение с помощью реактивной
струи по закону сохранения импульса
лежит в основе гидрореактивного
двигателя. В основе движения многих
морских моллюсков (осьминогов, медуз,
кальмаров, каракатиц) также лежит
реактивный принцип.
16 билет
Если действующая на тело сила F вызывает его перемещение s, то действие этой силы характеризуется величиной, называемой механической работой (или, сокращенно, простоработой).
Механической работой А называют скалярную величину, равную произведению модуля силы F, действующей на тело, и модуля перемещения s, совершаемого телом в направлении действия этой силы, т. е.
А=Fs. (3.9)
В
случае, описываемом формулой (3.9),
направление перемещения тела совпадает
с направлением силы. Однако чаще
встречаются случаи, когда сила и
перемещение составляют между собой
угол, не равный нулю или p.
(рис. 30)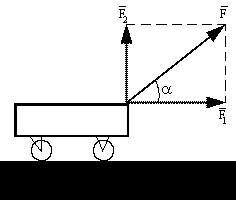
Разложим силу F на две взаимно перпендикулярные составляющие F1 и F2 (F=F1+F2). Поскольку механическая работа - величина скалярная, то работа силы F равна алгебраической сумме работ сил F1 и F2, т. е. А=А1+А2.
Под действием силы F2 тело перемещения не совершает, так как F2^s. Поэтому A2=0. Следовательно, работа А=А1=F1s. Из рисунка видно, что F1=Fcosa. Поэтому
А=Fsсоsa. (3.10)
Таким образом, в общем случае механическая работа равна произведению модуля силы и модуля перемещения на косинус угла между направлениями силы и перемещения. Работа силы, направленной вдоль перемещения тела, положительна, а силы, направленной против перемещения тела, - отрицательна. По формулам (3.9) и (3.10) вычисляют работу постоянной силы. Единицу механической работы устанавливают из формулы (3.9). В СИ за единицу работы принята работа силы 1 Н при перемещении точки ее приложения на 1 м. Эта единица имеет наименование джоуль (Дж): 1 Дж = 1Н·1м.