

1.3.5. Ускорение мт
На основании формул (1.3) и (1.15) получим:
![]() .
(1.22)
.
(1.22)
Так
как
![]() =1
и угол смежности
выступает в роли ,
то, используя (1.20), найдем:
=1
и угол смежности
выступает в роли ,
то, используя (1.20), найдем:
 . (1.23)
. (1.23)
Подставив соотношение (1.23) в выражение (1.22), определим составляющие ускорения МТ:
![]()
![]() . (1.24)
. (1.24)
Здесь нормальное ускорение:
![]() , (1.25)
, (1.25)
![]() ;
(1.26)
;
(1.26)
касательное ускорение:
![]() ,
(1.27)
,
(1.27)
![]() .
(1.28)
.
(1.28)

Рис. 10
Если
![]() ,
то движение будет ускоренное.
,
то движение будет ускоренное.
Если
![]() ,
то движение будет замедленное.
,
то движение будет замедленное.
1.4. Частные случаи движения мт
1.4.1. Прямолинейное движение мт
Уравнения движения МТ при различных способах задания движения (рис.11) в случае прямолинейного движения имеют вид:
векторный способ задания движения МТ:
![]() -
радиус-вектор постоянного направления:
-
радиус-вектор постоянного направления:
координатный декартовый способ задания движения МТ:
![]() ;
;
естественный способ задания движения МТ:
 .
.

Рис. 11
Равномерное прямолинейное движение МТ
В этом случае V=const=V0, W=0 (W=0, Wn=0), к.
Используя
естественный способ задания движения,
проинтегрируем методом разделения
переменных выражение
![]() :
:
 .
.
В результате получим уравнение движения МТ:
s = s0+V0t, (1.29)
где so и Vo здесь и в дальнейшем определяют положение и модуль скорости МТ при t=0.
Равнопеременное прямолинейное движение МТ
В этом случае W=W=const=W0, Wn=0, к .
Проинтегрируем
методом разделения переменных выражение
![]() :
:
 .
.
В результате получим уравнение изменения скорости МТ:
V=V0+W0t. (1.30)
Используем
формулу
![]() в соотношении (1.30) и проинтегрируем
полученное выражение методом разделения
переменных:
в соотношении (1.30) и проинтегрируем
полученное выражение методом разделения
переменных:
 .
.
В результате получим уравнение движения МТ в случае ее прямолинейного равнопеременного движения:
![]() .
(1.31)
.
(1.31)
1.4.2. Криволинейное движение мт
Равномерное криволинейное движение МТ, естественный способ задания движения (рис. 12).
В этом случае V=const=V0, W=Wn, W=0.

Рис. 12
Проинтегрировав
выражение
![]() ,
получим уравнение движения МТ, аналогичное
уравнению равномерного прямолинейного
движения МТ (1.29):
,
получим уравнение движения МТ, аналогичное
уравнению равномерного прямолинейного
движения МТ (1.29):
s=s0+V0t. (1.32)
Полное ускорение МТ, равное его нормальной составляющей, определяется формулой (1.26):
![]() .
(1.33)
.
(1.33)
Равнопеременное криволинейное движение МТ, естественный способ задания движения.
В
этом случае ![]() const
const
![]() .
.
Проведем
преобразования аналогичные тем, которые
были проведены при рассмотрении
равнопеременного прямолинейного
движения, заменив при этом
![]() на
на![]() .
В результате получим после первого
интегрирования уравнение изменения
скорости МТ:
.
В результате получим после первого
интегрирования уравнение изменения
скорости МТ:
![]() , (1.34)
, (1.34)
а после второго интегрирования уравнение движения МТ:
![]() .
(1.35)
.
(1.35)
Нормальная составляющая ускорения определяется формулой (1.33).
1.5. Алгоритм решения задач кинематики мт – схема алгоритма к01 кмт с комментариями и примерами

Комментарии
К.2. Принимается за МТ рассматриваемый объект.
Пропускается часть процессов, если по условию задачи некоторые кинематические параметры движения МТ или их составляющие заданы.
Используется подпрограмма К01 КМТ(Р) для частных случаев равномерного и равнопеременного движения МТ (стр. 40).
К.3,4. Выбирается, если он не указан, способ задания движения МТ (система отсчета), исходя из условий задачи.
Могут быть использованы, кроме представленных в схеме алгоритма способов задания движения МТ, полярные, цилиндрические, сферические координаты.
Изображаются, если уравнения движения не заданы и их необходимо получить, положение и координаты МТ в текущий момент времени, близкий к начальному.
Выражаются координаты МТ через заданные размеры и параметры движения, исходя из геометрических построений.
Уравнения движения МТ в координатной форме являются также уравнениями траектории МТ в параметрической форме с параметром t. Для того чтобы получить уравнения траектории в явной форме, из уравнений движения необходимо исключить t.
Между ветвями "а", "б" и "в" расположены формулы перехода от одного способа задания движения МТ к другому.
К.5б,6в,7в,8б. Решаются с помощью формул этих уровней, как прямая задача определения скоростей и ускорений МТ по заданным уравнениям движения МТ – в основном дифференцированием, так и обратная задача определения уравнений движения МТ по заданным функциям скоростей или ускорений МТ – в основном интегрированием с учетом начальных условий.
К.6б,9б. Определяются,
если необходимо, направляющие косинусы
углов, которые составляют
![]() и
и
![]() с осями декартовой системы координат
по известным формулам (формулы 1.9 и
1.13).
с осями декартовой системы координат
по известным формулам (формулы 1.9 и
1.13).
К.11. Изображаются все полученные результаты на чертеже после подстановки заданного момента времени в уравнения движения МТ и в выражения для скорости и ускорения МТ.
Пример
2 Колесо радиуса =0,5 м катится без скольжения по горизонтальной поверхности с постоянной скоростью центра VС=6 м/c (рис. 13). Определить уравнения движения точки В обода колеса, скорость, ускорение этой точки и радиус кривизны траектории в момент времени t=/4 c, если в начальный момент времени точка В находилась в низшем положении. Кроме того, определить закон движения точки В по траектории – s(t).
Равномерное или равнопеременное движение точки В? Нет.
3 Координатный декартовый способ: ветвь "б".
4б Уравнения движения:
![]()
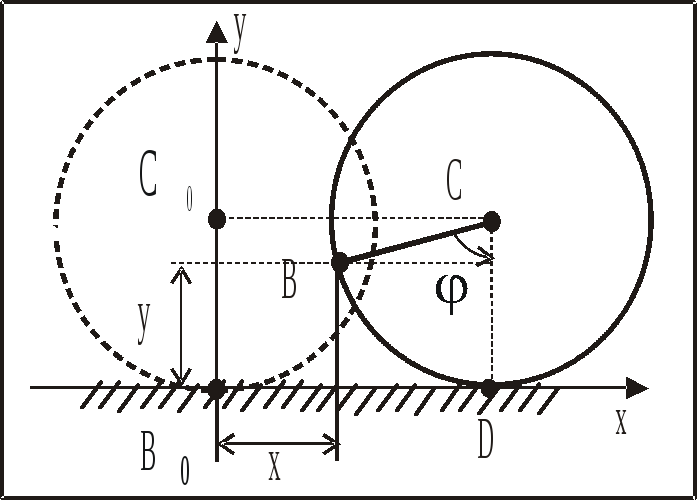
Рис. 13
Так как на основании формулы (1.29)
xС=В0D=С0С=VCt=6t, а yС=СD=CB=
и
скольжение отсутствует, то для дуги
![]() можно записать:
можно записать:
![]() =
B0D=6t,
=
B0D=6t,
![]() .
.
В результате получим:
![]() ,
,
![]() .
.
5б
![]() ,
,
![]() .
.
6б
![]() .
.
8б
![]() ,
,
![]() .
.
9б
![]() .
.
10б
Определить s,![]() ?
Да, определить s
и к.
?
Да, определить s
и к.
4
 здесь s0=0,
t0=0.
здесь s0=0,
t0=0.
7в
![]()
8в Дано к? Нет.
9в
![]()
10в
![]()
11 Ответ (полученные результаты изображены на рис. 14):
Уравнения
движения:
![]()
![]() .
.
Положение
точки B:
![]()
Скорость
точки B:
![]()
![]() .
.
Ускорение
точки В: ![]()
![]()
![]()
Закон
движения точки В по траектории:
![]() .
.
Радиус
кривизны траектории точки В:
![]() .
.

Рис.14
1.6. Алгоритм решения задач кинематики равномерного и равнопеременного движений МТ – схема алгоритма К01 КМТ(Р) с комментариями и примерами

Комментарии
К.2. Принимается за МТ рассматриваемый объект.
К.3. Определяется из условия задачи наличие случаев, при которых n>1:
движение нескольких – n МТ, связанных между собой одинаковыми положениями, моментами времени, кинематическими параметрами;
движение одной МТ по траектории, состоящей из нескольких участков – n, имеющих либо разную конфигурацию, либо различные кинематические параметры движения МТ.
К.4,5. Определяется тип частного случая движения МТ (а, б, в, г) из условий задачи.
К.6-8. Используется естественный способ задания движения МТ. Для прямолинейного движения МТ (а, в) в формулах уровней 6–8 могут быть использованы также координатный декартовый способ задания движения МТ.
В формулах этих уровней для компактности изложения опущены индексы различных циклов.
К.9. Добавляются к уравнениям, используемым в уровнях 6-8, уравнения, полученные:
из равенств перемещений, моментов времени, кинематических параметров нескольких МТ;
из условий, что конечные кинематические параметры для МТ на одном участке являются начальными для последующих и т. д.
Количество уравнений должно соответствовать числу неизвестных перемещений, моментов времени и кинематических параметров.