

1.2.2. Связь между векторным и координатным декартовым способами задания движения мт
Разлагая радиус-вектор МТ на составляющие, параллельные осям декартовой системы координат, получим искомую связь:
![]() .
(1.5)
.
(1.5)
1.2.3. Траектория мт
Уравнения (1.4) являются также уравнениями траектории МТ в параметрической форме, где параметром является время t.
Для того чтобы получить уравнение траектории МТ в явной форме необходимо из соотношений (1.4) исключить время t.
1.2.4. Скорость мт
Разлагая скорость МТ на составляющие, параллельные осям декартовой системы координат, получим:
![]() ,
(1.6)
,
(1.6)
где Vx, Vy, Vz — проекции скорости МТ на соответствующие оси декартовой системы координат.
Учитывая соотношение (1.5), на основании соотношения (1.2) получим:
![]() .
(1.7)
.
(1.7)
Сравнивая соотношения (1.6) и (1.7), можно записать:
![]() (1.8)
(1.8)
Используя соотношения (1.8), определяются модуль скорости МТ и направляющие косинусы углов, которые составляет скорость МТ с осями декартовой системы координат:
![]() (1.9)
(1.9)

![]()
1.2.5. Ускорение мт
Разлагая ускорение МТ на составляющие, параллельные осям декартовой системы координат, получим:
![]() ,
(1.10)
,
(1.10)
где Wx, Wy, Wz — проекции ускорения МТ на оси декартовой системы координат.
Учитывая соотношения (1.5) и (1.6), на основании формулы (1.3) получим:
 (1.11)
(1.11)
Сравнивая соотношение (1.10) и (1.11), можно записать:
 (1.12)
(1.12)
Используя формулы (1.12), определяются модуль ускорения МТ и направляющие косинусы углов, которые составляет ускорение МТ с осями декартовой системы координат:
![]() (1.13)
(1.13)


1.3. Естественный способ задания движения мт
1.3.1. Уравнение движения МТ
При естественном способе задания движения МТ необходимо знать:
траекторию движения МТ,
начало отсчета длины дуги на траектории — В0,
положительное направление отсчета,
закон движения МТ по траектории в виде зависимости от времени длины дуги s, отсчитываемой от точки В0 до точки В (уравнение движения), т.е.
s=s(t). (1.14)

Рис. 5
Функция
![]() должна быть однозначной, непрерывной
и дважды дифференцируемой.
должна быть однозначной, непрерывной
и дважды дифференцируемой.
1.3.2. Скорость МТ
Для выражения скорости МТ через s, используя формулу (1.2), после простых преобразований получим:
![]() .
.
При В1В, (s0), длина дуги стремится к длине хорды:
![]() .
.
Направление
![]() совпадает с касательной к траектории
в точке В.
совпадает с касательной к траектории
в точке В.
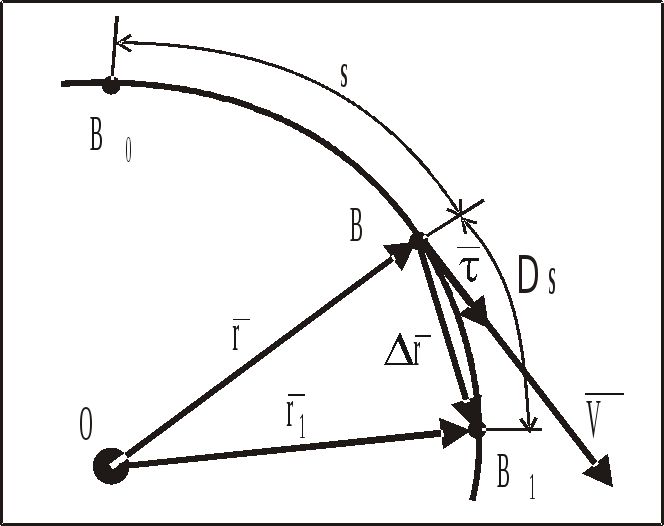
Рис. 6
Таким
образом,
![]() ,
где
,
где
![]() и является единичным вектором касательной,
направленным в сторону возрастания
длины дуги s
(рис.6) и тогда
и является единичным вектором касательной,
направленным в сторону возрастания
длины дуги s
(рис.6) и тогда
![]() , (1.15)
, (1.15)
![]() .
(1.16)
.
(1.16)
1.3.3. Связь между координатным декартовым и
естественным способами задания движения МТ
Даны уравнения движения МТ в виде (1.4):
x=x(t), y=y(t), z=z(t).
Перейдем к естественному способу задания движения МТ.
Для выполнения четырех условий п. 1.3.1 необходимо:
использовать соотношения (1.4), как уравнения траектории МТ в параметрической форме, где параметром является время t, и, чтобы получить уравнение траектории МТ в явной форме, из него надо исключить время t;
определить положение МТ в начальный момент времени В0(x0, y0, z0) на траектории, подставив в уравнение (1.4) t=0:
x0=x(0), y0=y(0), z0=z(0);
определить положительное направление отсчета длины дуги на траектории МТ, подставив в уравнение (1.4) момент времени t > 0 (близкое к начальному), изобразить В (x, y, z) на траектории и тогда направление движения по траектории от В0 к В будет положительным;
найти s=s(t), используя формулу (1.16) и первое соотношение в выражениях (1.9):

![]() . (1.17)
. (1.17)
1.3.4. Элементы дифференциальной геометрии
Для определения ускорения МТ при естественном способе задания движения МТ необходимо знать некоторые сведения из дифференциальной геометрии.
Кривизна, радиус кривизны и соприкасающаяся плоскость
Проведем
в точке В к кривой
![]() единичный касательный вектор, а в точке
В1,
отстоящей от точки В на расстоянии s
по траектории, единичный касательный
вектор
единичный касательный вектор, а в точке
В1,
отстоящей от точки В на расстоянии s
по траектории, единичный касательный
вектор
![]() (рис. 7).
(рис. 7).
В
точку В перенесем параллельно самому
себе вектор
![]() и обозначим угол между
и обозначим угол между
![]() и
и
![]() через .
через .

Рис. 7
Определение: Кривизной кривой – k в точке В называется
![]() . (1.18)
. (1.18)
Определение: Радиусом кривизны кривой – к в точке В называется величина, обратная кривизне кривой в этой точке, т.е.
![]() . (1.19)
. (1.19)
Естественный трехгранник
Определения:
Соприкасающейся
плоскостью кривой
в точке В называется предельное положение
плоскости, проходящей через
![]() и
и
![]() ,
перенесенного параллельно самому себе
в точку В1,
при s0
(рис. 8).
,
перенесенного параллельно самому себе
в точку В1,
при s0
(рис. 8).
Первая
естественная ось – это касательная,
направленная в сторону возрастания
дуговой координаты s
с единичным
касательным вектором
![]() .
.
Нормальной
плоскостью
называется плоскость, проходящая через
точку В перпендикулярно к
![]() (рис. 8).
(рис. 8).
Линия пересечения соприкасающейся и нормальной плоскостей называется главной нормалью.
Единичный
вектор, направленный по главной нормали
в сторону вогнутости траектории,
называется единичным
нормальным вектором
![]() .
.

Рис. 8
Спрямляющей плоскостью называется плоскость, проходящая через точку В перпендикулярно к соприкасающейся и нормальной плоскостям.
Линия пересечения нормальной и спрямляющей плоскостей называется бинормалью.
Единичный
вектор, направленный по бинормали в ту
сторону, чтобы он составлял правую
тройку векторов с векторами
![]() и
и
![]() (с конца вектора
(с конца вектора
![]() поворот от
поворот от
![]() к
к
![]() должен быть виден против хода часовой
стрелки), называется единичным
бинормальным вектором
должен быть виден против хода часовой
стрелки), называется единичным
бинормальным вектором
![]() .
.
Три
взаимно перпендикулярные оси, положительные
направления которых совпадают с
направлениями единичных векторов
![]() ,
,
![]() ,
,
![]() ,
называются естественными осями. Эти
оси вместе с тремя плоскостями:
соприкасающейся, нормальной и спрямляющей
образуют в точке В естественный
трехгранник.
,
называются естественными осями. Эти
оси вместе с тремя плоскостями:
соприкасающейся, нормальной и спрямляющей
образуют в точке В естественный
трехгранник.
При движении точки по кривой естественный трехгранник движется вместе с точкой, поворачиваясь вокруг вершины, совпадающей с движущейся точкой.
Производная по скалярному аргументу от вектора постоянного модуля
Пусть
![]()
![]() (u)
- векторная функция скалярного аргумента,
(u)
- векторная функция скалярного аргумента,
имеющая
постоянный модуль:
![]() .
.
На основании определения производной можно записать
![]() .
.
Так как по условию а(u)=а(u+u), то из равнобедренного треугольника ОВВ1 (рис. 9) можно определить:
![]() .
.
Тогда 
 ,
здесь
,
здесь
 .
.
Если
продифференцировать по u
выражение
![]() =а2=const,
получим
=а2=const,
получим ![]() ,
т. е.
,
т. е.
![]() .
.

Рис. 9
Обозначив
через
![]() единичный вектор, перпендикулярный к
единичный вектор, перпендикулярный к
![]() ,
можно записать:
,
можно записать:
![]() .
.
Если скалярным аргументом будет время t, то
![]() .
(1.20)
.
(1.20)
Формулу (1.20) можно выразить векторным произведением:
![]() ,
(1.21)
,
(1.21)
где
![]() — вектор, равный по модулю
— вектор, равный по модулю
![]() ,
направленный перпендикулярно к плоскости,
в которой расположены
,
направленный перпендикулярно к плоскости,
в которой расположены ![]() и
и
![]() так, что поворот от
так, что поворот от ![]() к
к
![]() виден против хода часовой стрелки.
Понятие угловой скорости —
виден против хода часовой стрелки.
Понятие угловой скорости —
![]() будет подробно рассмотрено в главе 3
"Вращательное движение НМС вокруг
неподвижной оси".
будет подробно рассмотрено в главе 3
"Вращательное движение НМС вокруг
неподвижной оси".