

3.1. Тенденции создания асу тп аэс
Общие положения. Быстрое развитие микроэлектроники, появление микропроцессоров и создание на их основе программно-технических средств (ПТС) низовой автоматики, а также прогресс в технике связи привели к созданию распределенных, интегрированных АСУ ТП с принципиально новыми возможностями, в том числе [1,2, 3]:
возможностью реализации более сложных алгоритмов обработки и управления по сравнению с "жесткой логикой";
упрощением обмена информацией и взаимодействия между различными подсистемами;
большей гибкостью к изменениям структуры и функций системы;
большими возможностями самодиагностики средств;
малыми габаритами и энергопотреблением.
Конфигурирование оборудования облегчается благодаря высокой модульности комплекса. Функциональные модули могут иметь собственные программы. Программирование логических выражений (алгоритмов) осуществляется на языке функциональных диаграмм.
Переход к микропроцессорной технике позволил повысить надежность и гибкость систем, улучшить человеко-машинный интерфейс, расширить возможности проверки технологического оборудования, повысить готовность энергоблока благодаря раннему предотвращению отклонений от условий нормальной эксплуатации и избежать ненужных аварийных остановов за счет более точного учета текущего состояния управляемого технологического процесса. Все это существенно повышает безопасность и экономичность работы АЭС и эффективность системы управления.
Основные идеи, которые могут быть более полно воплощены в системах автоматизации на базе микропроцессоров и распределенных систем, следующие:
гибкость, изменяемость структуры автоматической системы без существенных затрат;
возможность постепенного наращивания решаемых задач управления и форм представления информации без изменения архитектуры комплекса;
уменьшение времени восстановления оборудования и восстановление без прекращения процесса;
интеллектуализация приборов, средств и систем контроля и управления;
более полное и простое воплощение идей резервирования, дифференциации отказов и их локализации;
в области диагностики:
более полная диагностика;
переход от диагностики неисправности к диагностике возможного выхода из строя элемента и своевременного предупреждения;
новые методы, вытекающие из новых возможностей, например моделирование процесса в реальном и ускоренном масштабе времени и прогнозирование ситуации, шумовая диагностика, комплексная диагностика по набору признаков;
эшелонированная защита с максимальным сохранением работоспособности АСУ ТП; управление при выходе из строя оборудования и нехватке вычислительных ресурсов (с ухудшением качества управления);
оптимизация процессов управления для получения экономических выгод.
В основу повышения надежности и эффективности систем управления современных АЭС приняты следующие факторы [1,4]:
функциональная децентрализация системы;
создание распределенных, интегрированных АСУТП с иерархической структурой;
применение в АСУ ТП средств, специально предназначенных для использования на АЭС;
резервирование программно-технических средств, диагностирование на уровне функциональных модулей;
наличие современной технологии разработки АСУТП;
использование компьютеризированных средств на БПУ;
внедрение в УСБ средств вычислительной техники;
внедрение стандартных способов передачи данных, стандартных протоколов, операционных систем, реляционных баз данных.
Функциональная децентрализация предусматривает декомпозицию технологических систем энергоблока на функционально-технологические комплексы, подсистемы, группы и отдельное оборудование (гл. 5). Общая задача управления технологическим процессом энергоблока содержит комплекс задач, связанных с управлением отдельными функционально-технологическими подсистемами и группами, согласованием их работы и обеспечением эффективного человеко-машинного взаимодействия [5, 6].
АСУ ТП АЭС объединяет АСУ ТП общестанционной части и АСУ ТП энергоблоков и представляет собой интегрированную, иерархической структуры
систему, в которой на высшем уровне иерархии автоматизированная система диспетчерского управления энергосистемы, на следующем уровне АСУ ТП общестанционной части и на нижнем уровне АСУ ТП энергоблоков.
В структуре АСУ ТП энергоблока принято разделение на два уровня иерархии:
блочный уровень;
нижний уровень (низовая автоматика).
В состав нижнего уровня АСУ ТП входят управляющие и информационные системы, приведенные в главе 2. Указанные системы являются автономными и реализуют конкретные функции контроля и управления в соответствии с декомпозицией технологических систем энергоблока. Интеграция СКУ осуществляется средствами блочного уровня.
Иерархия АСУ ТП АЭС приведена на рис. 3.1. На общестанционном уровне решаются вопросы оперативно-диспетчерского управления и управления производственно-технической деятельностью АЭС, а также вопросы управления общестанционными технологическими системами и оборудованием. На уровне энергоблока решаются задачи ведения основного технологического процесса — выработки электроэнергии [7].
Распределенные АСУ ТП по сравнению с централизованными системами имеют преимущество по важнейшим технико-экономическим показателям: надежности, протяженности и загруженности коммуникаций, техническому обслуживанию, способности к функциональному расширению, стоимости.
В АСУ ТП АЭС нового поколения УСНЭ ВБ и УСНЭ разрабатываются на основе средств микропроцессорной техники. Высокие требования к надежности ПТС явились причиной осторожного подхода разработчиков к внедрению средств микропроцессорной техники в УСБ. Однако уже имеется опыт создания УСБ на средствах вычислительной техники для АЭС N4 (Франция), АЭС "Temelin" (Чехия), Тяньваньской АЭС (Китай).
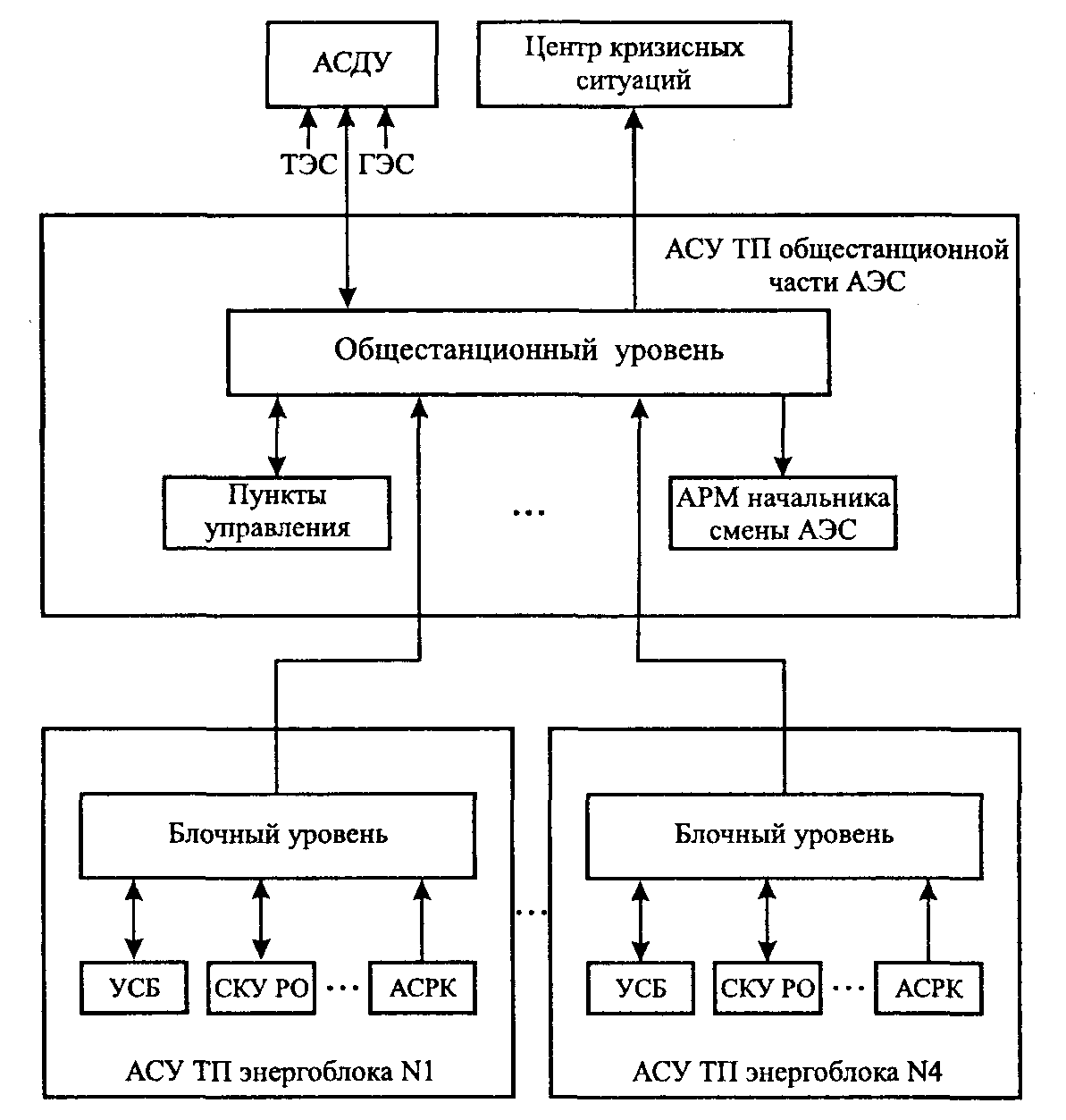
Рис. 3.1. Иерархия АСУ ТП АЭС
АСУ ТП АЭС с ВВЭР-1000 (АС-92). Основным способом управления технологическим процессом является дистанционное управление с АРМ оперативного персонала БПУ.
АСУ ТП выполнена на базе ТПТС и устройств "жесткой логики" [14].
Исходными предпосылками для выбора структуры АСУ ТП являлись:
расчетная загрузка сетей энергоблока и локальных вычислительных сетей (ЛВС) не должна превышать 40 % от их технических возможностей;
суммарное количество абонентов в сети СВБУ не должно превышать 100 ед.;
конфигурация системных шин низовой автоматики объединяет до 9 отдельных секций (сегментов);
загрузка каждой секции системной шины ТПТС рассчитана на поток из 3000 аналоговых сигналов и 5000 дискретных.
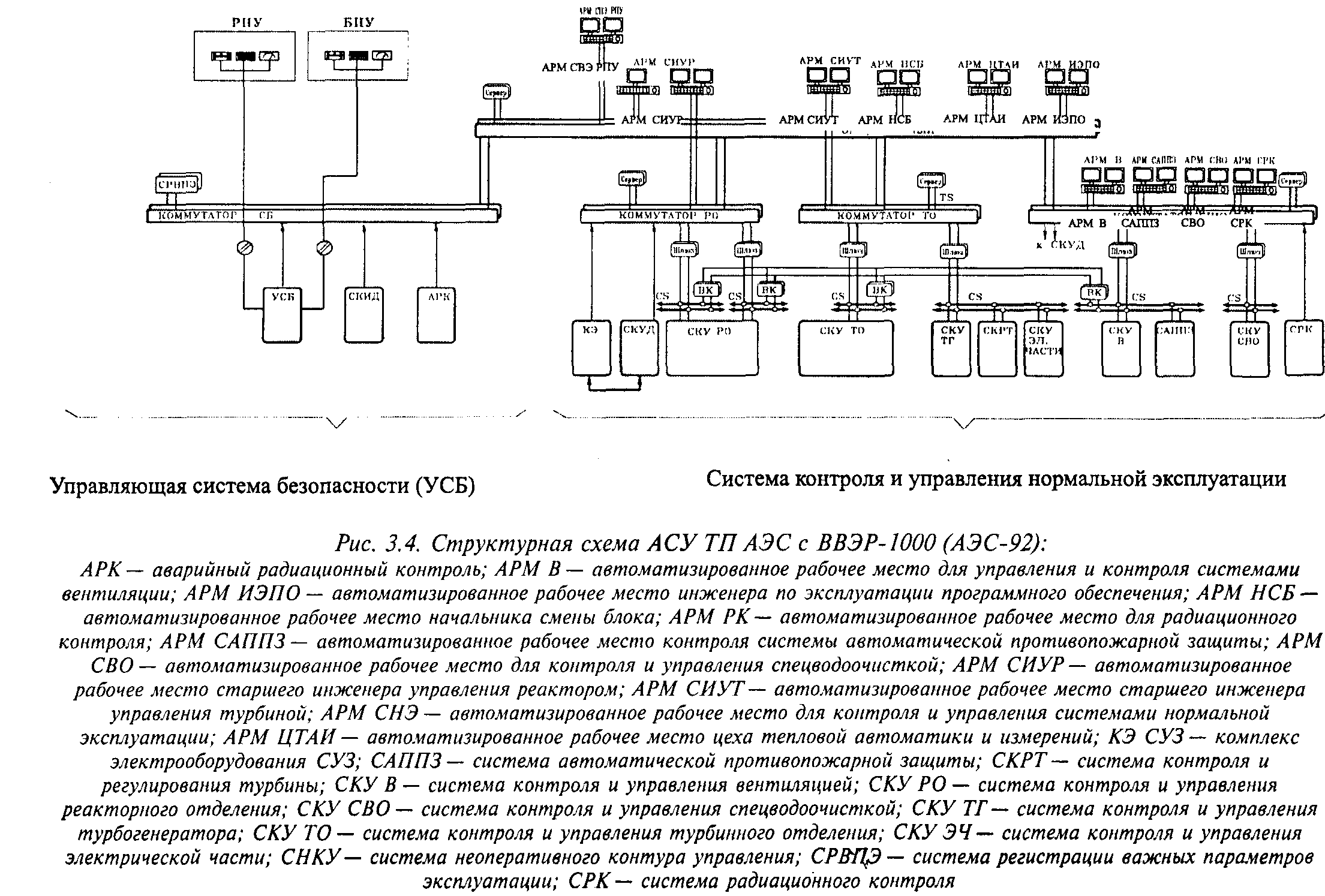
Структурная схема АСУ ТП приведена на рис. 3.4.
В АСУ ТП предусмотрены четыре автономных канала УСБ. Каналы УСБ физически отделены друг от друга и от систем нормальной эксплуатации.
В состав УСБ входят:
два комплекта аварийных и предупредительных защит СУЗ, действующих независимо по логике "один из двух" на останов реактора;
четыре устройства запуска систем безопасности УСБИ, обеспечивающих формирование команд УСБТ;
четыре комплекта УСБТ.
СУЗ, УСБИ и УСБТ строятся по логике "два из трех" с индивидуальными датчиками. В УСБТ реализуются задачи управления по командам УСБИ, командам из БПУ, РПУ, а также по сигналам локальных блокировок.
Подсистемы АЗ-ПЗ и УСБИ реализованы на элементах "жесткой логики".
УСБТ вырабатывает команды управления механизмами системы безопасности и реализована на ТПТС.
В качестве ПТС низовой автоматики контроля и управления оборудованием приняты
средства ТПТС. Сопряжение ТПТС с объектом управления и связь с силовыми устрой-
'ствами управления выполнены с помощью реле развязки и гальванического разделения.
Система контроля, управления и диагностики представляет собой децентрализованную систему, состоящую из автономных подсистем, объединенных общей задачей контроля, управления и диагностики реакторной установки.
СВБУ реализует информационные, управляющие, сервисные и вспомогательные функции АСУ ТП. В качестве ПТС СВБУ приняты средства индустриальной платформы Compact PCI, в качестве процессоров— Intel Pentium III с частотой не ниже 700 МГц для серверов и 500 МГц для рабочих станций.
Основными элементами СВБУ являются АРМ оперативного персонала, серверы, локальная вычислительная сеть. Взаимодействие СВБУ с ПТК АСУ ТП осуществляется через шлюзы.
Автоматизированные рабочие места оперативного персонала БПУ реализуются на основе рабочих станций.
Для использования потенциальных возможностей по скорости обмена данными, обеспечиваемых стандартом IEEE 802.3, а также для возможности дальнейшей модернизации и развития сети основные концентрирующие узлы сети реализованы на основе коммутаторов.
ЛВС СВБУ разделяется на две подсети — основную и резервную. Обе подсети равноправны, симметричны и отличаются лишь местоположением части абонентов и логическими адресами абонентов.
На основании результатов рассмотрения ряда проектов АСУ ТП АЭС с реакторными установками ВВЭР можно подчеркнуть следующее:
1. АСУТП АЭС создаются как интегрированные, распределенные, иерархической структуры вычислительные системы. АСУ ТП АЭС обладают общностью в части топологии и представляют собой локальные вычислительные сети (ЛВС). Архитектура, принципы построения, аппаратура ЛВС приведены в [15, 16, 17].
2. В основе АСУ ТП — унифицированные микропроцессорные ПТС, что позволяет сократить затраты на проектирование, изготовление и эксплуатацию СКУ отдельных систем.
3. При создании управляющих систем безопасности имеют место следующие подходы:
комбинированный с использованием элементов "жесткой логики" и программируемых средств (АЭС с ВВЭР-640, АЭС с ВВЭР-1000);
разработка УСБ (СУЗ, УСБТ) на базе программируемых средств (АЭС "Темеlin");
применение принципа разнообразия оборудования (АЭС "Temelin"), принципа функционального разнообразия (АЭС с ВВЭР-640).
4. При создании средств низовой автоматики (УСНЭ, УСНЭ ВБ) имеют место:
внедрение микропроцессорных функциональных модулей; применение модулей, обеспечивающих решение задач программно-логического управления (Teleperm ХР, ТПТС).
5. Имеют место нестандартные интерфейсы (например, шина CS-275). Соответственно, сопряжение ПТК с СВБУ осуществляется с помощью шлюзов.