

4.3. Программно-технические средства нижнего уровня асу тп
Функции программно-технических комплексов. ПТС нижнего уровня обеспечивают построение ПТК, выполняющих следующие функции:
ввод и обработка информации, необходимой для реализации автоматического контроля и управления, и передачи данных на верхний уровень АСУ ТП;
контроль и сигнализация;
автоматизированное управление;
автоматическое управление;
автоматическое регулирование;
контроль работоспособности, диагностики и реконфигурации ПТС;
обмен данными между подсистемами АСУ ТП.
Функции ввода и первичной обработки информации:
1. Ввод информации от датчиков.
2. Формирование стандартного сообщения о величине измеряемого сигнала, сопровождаемое признаками достоверности, времени измерения.
3. Автоматический контроль и диагностика измерительных каналов, включая датчики и линии связи с ними.
4. Контроль достоверности принимаемой информации.
5. Присвоение измеряемому значению параметра метки времени.
6. Вычисление косвенно измеряемых параметров.
7. Размножение измерительной информации.
8. Формирование локальной базы данных. Функции контроля и сигнализации:
1. Сравнение текущих значений параметров с заданными значениями предупредительных и аварийных уставок.
2. Формирование и выдача сообщений о выходе текущего значения или скорости изменения параметра за пределы соответствующих уставок.
3. Программное изменение величин уставок. Функции автоматического управления:
1. Реализация алгоритмов технологических защит и блокировок, направленных на сохранение технологического оборудования от повреждений при выходе технологического процесса за пределы режима нормальной эксплуатации.
2. Реализация алгоритмов программно-логического управления.
3. Фиксация времени начала действий защит и блокировок.
4. Формирование диагностических сообщений о нарушениях в действиях защит и блокировок.
5. Реализация алгоритмов запрета на несанкционированное отключение защит и блокировок.
6. Регистрация аварийных событий.
Функции автоматизированного управления:
1. Ввод сигналов от средств управления блочного и резервного пунктов управления.
2. Контроль достоверности сигналов управления.
3. Формирование и выдача дискретных сигналов управления исполните, ными механизмами.
Функции автоматического регулирования:
1. Контроль состояния контура регулирования.
2. Контроль положения регулирующих органов.
3. Программное задание уставки регулируемой величины.
4. Дистанционное задание уставки регулируемой величины.
5. Программное изменение структуры и закона регулирования контура \ гулирования в соответствии с требуемым режимом работы.
6. Формирование управляющих воздействий.
7. Блокировка управляющих воздействий при отказах регулирующих испс нительных механизмов.
8. Вывод сообщений об отказах регулирующих исполнительных мехаш мов с соответствующими метками времени.
Функции контроля работоспособности, диагностики реконфигурации:
1. Контроль работоспособности технических средств ПТК, включая датч ки, исполнительные механизмы и линии связи с ними.
2. Контроль электропитания и температурного режима технических средств ПТ
3. Диагностика отказов ПТС с точностью до сменного модуля.
4. Ввод (вывод) резерва и реконфигурация ПТС.
5. Выдача сообщений о техническом состоянии (отказах, деградации Ш и т.д.) на блочный (станционный) уровень управления АСУТП АЭС.
Функции обмена данными с абонентами локальной сет
1. Формирование запроса на обмен данными.
2. Прием запроса на обмен данными.
3. Формирование буфера данных.
4. Прием запрашиваемых данных.
5. Контроль процедуры обмена и формирование признаков достоверное обмена.
6. Формирование признаков завершения обмена.
Состав ПТС нижнего уровня. Нижний уровень АСУ ТП энергоблока состоит из микропроцессорных средств низовой автоматики и средств индивидуального измерения и управления.
Средствами индивидуального измерения и управления выполняются функции преобразования контролируемых технологических параметров в типовые электрические сигналы, сопряжения средств нижнего уровня АСУ ТП с технологическим оборудованием.
В состав средств индивидуального измерения и управления входят средства измерения (датчики, нормирующие преобразователи и т.п.), средства сопряжения АСУ ТП с силовыми устройствами управления, средства коммуникации (соединительные коробки, кроссовые шкафы, кабели и т.п.).
На нижнем уровне АСУ ТП выполняются контроль достоверности и установочный контроль измерительной информации, передача данных на верхний уровень АСУ ТП, автоматическое управление, прием и отработка команд автоматизированного управления.
Средствами нижнего уровня АСУТП обеспечивается программно-логическое управление технологическим оборудованием энергоблока.
К ПТС российского производства, аттестованным для применения на АЭС, относятся типовые программно-технические средства ТПТС, средства СПА-ПС, комплекс "ПАССАТ".
Типовые программно-технические средства ТПТС [13]. В качестве средств низовой автоматики для УСНЭ и УСНЭ ВБ в АСУ ТП АЭС с ВВЭР-640 и АЭС с ВВЭР-1000 (АСУ ТП 3-го энергоблока Калининской АЭС, АСУ ТП АЭС "Бушер") используются типовые программно-технические средства ТПТС, созданные на основе TELEPERM ME разработки АО Siemens.
Основным элементом ТПТС являются контроллеры — программируемые устройства, обладающие средствами ввода и вывода аналоговых и дискретных сигналов и содержащие микропроцессоры Intel 80188. Структура контроллера приведена на рис. 4.7.
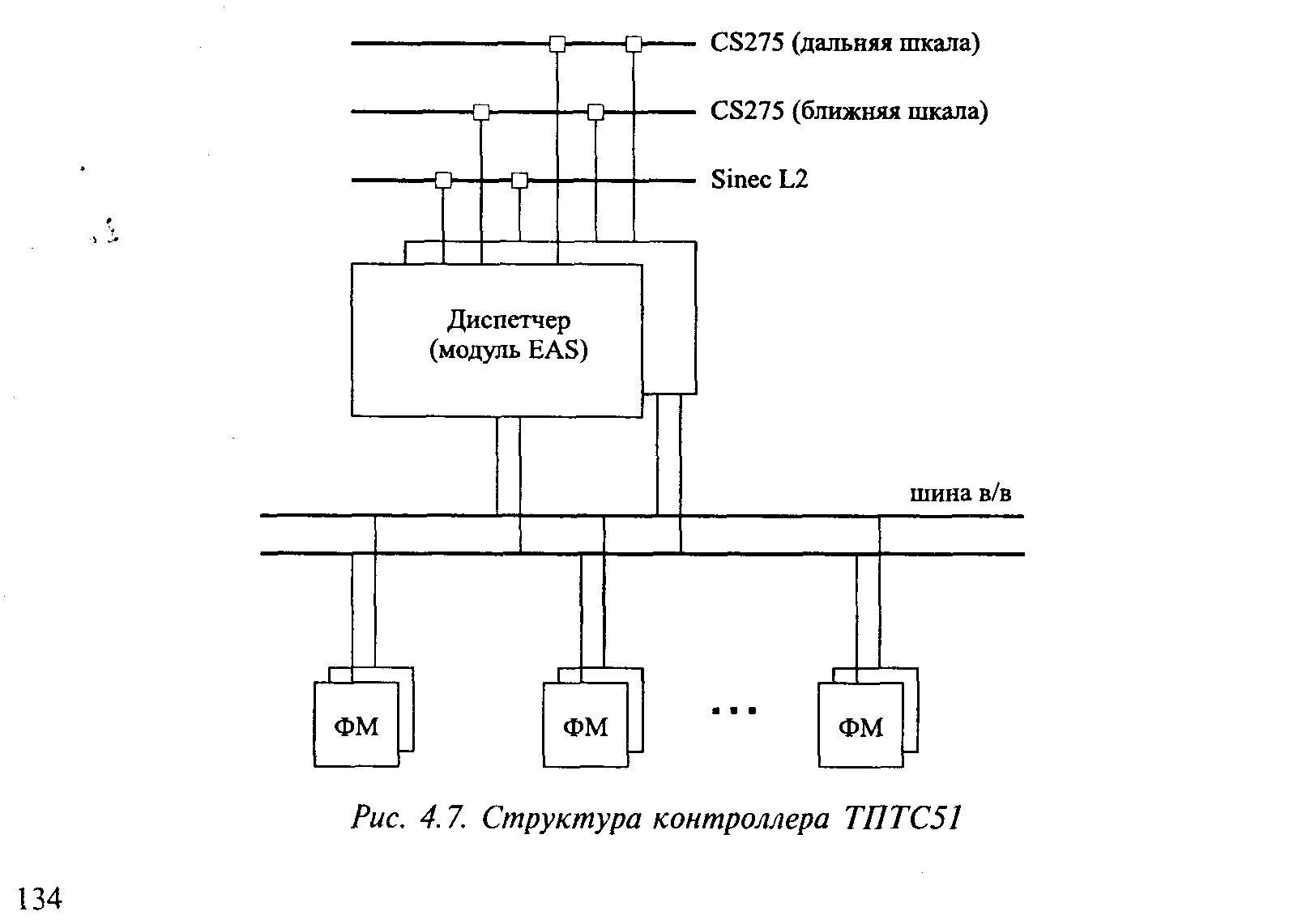
Основные функции обработки данных и управления вынесены в микропроцессоры, установленные в функциональные модули (ФМ). Каждый функциональный модуль представляет собой самостоятельный контроллер, обладающий способностью принимать и обрабатывать любые сигналы, выдавать как аналоговые, так и дискретные воздействия и осуществлять автоматическое управление технологическим процессом. Сохраняется возможность связи между функциональными модулями через контроллерную шину.
На центральный процессор — "Диспетчер" — возлагаются следующие функции:
управление контроллерной шиной;
обеспечение связи контроллера с "внешним миром" через системные шины;
системная диагностика;
управление резервированием.
В ТПТС51 каждый модуль способен работать самостоятельно и реализовать алгоритмы обработки и управления при выходе из строя контроллерной шины и центрального "Диспетчера".
Конкретный алгоритм модуля задается и модифицируется независимо от других модулей. Это упрощает процедуры отладки системы и подтверждения правильности функционирования модулей. Кроме того, упрощается процедура модификации алгоритмов.
Наличие микропроцессора в каждом функциональном модуле обеспечивает возможность введения процедур глубокой диагностики модуля и внешних цепей.
Состав и характеристики основных функциональных и системных модулей ТПТС приведены в табл. 4.3.
Количество модулей минимизировано, конструкция модулей унифицирована.
ТПТС обеспечивают возможность двукратного резервирования аппаратных средств. Резервирование реализуется по принципу "горячего резерва". Согласно этому принципу, в любой момент времени есть основной и резервный элементы, которые полностью выполняют свои функции.
Все элементы ТПТС имеют средства встроенной диагностики. При выявлении отказа средствами самодиагностики или взаимной диагностики происходит переключение на резервный вариант с выдачей всего набора диагностических и аварийных сообщений. Помимо парного взаимодействия, в системе предусмотрены диагностика и контроль со стороны третьего, обычно вышестоящего элемента, что обеспечивает адекватную реакцию в случае невозможности выявления отказа на уровне самих модулей.
Архитектура функционального модуля ТПТС. Обобщенная структурная схема функциональных модулей приведена на рис. 4.8. В зависимости от типа модулей отдельные узлы (цифро-аналоговые преобразователи (ЦАП), аналого-цифровые преобразователи (АЦП) или схемы согласования уровней (ССУ) двоичных сигналов) могут отсутствовать).
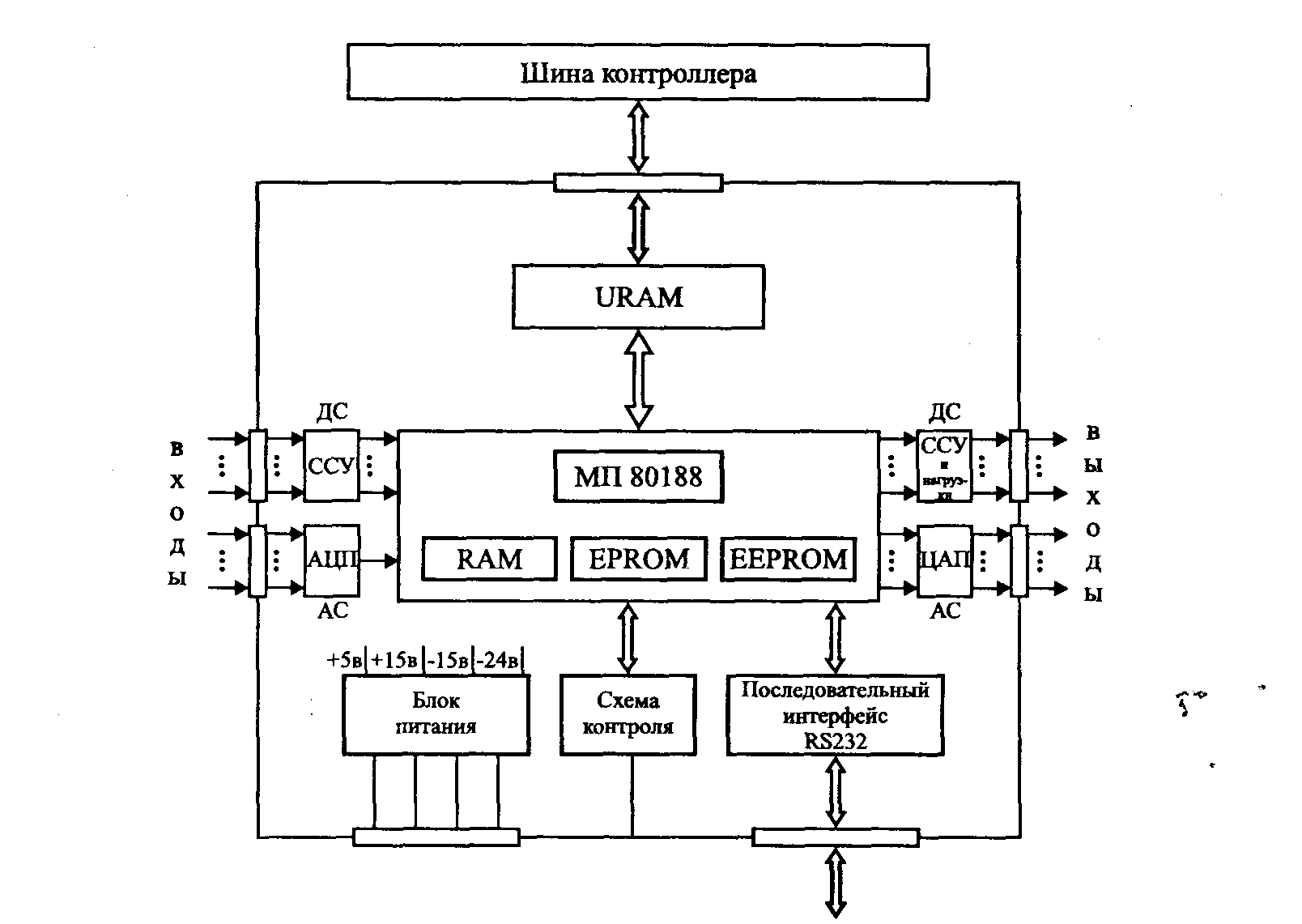
Рис. 4.8. Структурная схема функционального модуля
Ядром модуля является процессорная часть, в состав которой входит микропроцессор Intel 80188, и память процессора, состоящая из оперативной памяти (RAM) и по стоянной памяти EPROM и EEPROM. В EPROM хранятся программные блоки, реализующие арифметические и логические функции, присущие всем модулям (сложение, умножение, дифференцирование, сравнение чисел и т. д.), программные блоки, реализующие функции, специфические для конкретного типа модулей (например, управляющие блоки для модулей управления или алгоритмы регулирования для модулей регуляторов) и программные блоки, реализующие функции контроля, логику прерывания и т.п. Программные блоки записываются в EPROM на этапе изготовления.
В EEPROM хранятся программы пользователя и перечень описаний стандартных функциональных блоков, в соответствии с которым они вызываются из EPROM, настраиваются и выполняются. Данные в EEPROM записываются на этапе проектирования конкретного ПТК.
Для обмена информацией по шине в/в предназначена передающая память URAM — двухпортовое оперативное запоминающее устройство ("почтовый ящик"), доступное через один порт внутримодульному процессору, а через второй порт — процессору модуля EAS.
Узел АЦП предназначен для приема аналоговых сигналов, мультиплексирования каналов и преобразования аналоговых сигналов в цифровую форму.
Узел ЦАП преобразует выходные сигналы из цифровой формы в аналоговую и коммутирует их на выходной разъем модуля.
Микропроцессор циклически опрашивает входные сигналы и URAM (информацию, принятую от модуля EAS), обрабатывает принятую информацию по заданной пользователем программе и выдает результаты обработки на выходной разъем модуля и в URAM.-
Сбор, обработка и выдача информации может осуществляться в двух циклах: в быстром цикле длительностью от 23,3 мс до 86,6 мс в зависимости от типа модуля, и медленном с длительностью, зависящей от выполняемой в данном цикле программы. Медленный цикл по отношению к быстрому циклу является фоновым, т. е. выполняется в свободное время быстрого цикла.
Функциональные модули имеют широкий набор функций самоконтроля, обеспечиваемого аппаратными и программными средствами.
Стандартные функции контроля в функциональных модулях:
циклические тесты EPROM, EEPROM, RAM;
контроль передачи данных по шине в/в;
контроль функционирования микропроцессора схемой электронного сторожа WatchDog;
контроль микропроцессором схемы WatchDog;
аппаратный контроль внутренних номиналов напряжений на соответствие заданным пределам.
В зависимости от типа модуля осуществляется также программно-аппаратный контроль:
датчиков и линий их подключения на обрывы и замыкания;
выходных сигналов обратным чтением;
контроль схем согласования и преобразования уровней сигналов;
контроль схем АЦП и ЦАП.
Сетевые средства ТГТТС. В состав сетевых средств нижнего уровня АСУ ТП входят две шинные системы:
шинная система CS275;
шина межсистемной связи Sinec L2.
Дублированная шинная система CS275 предназначена для обеспечения обмена информацией между нижним и блочным уровнями АСУ ТП. Доступ к шине CS275 основан , на принципе распределенного управления (передачи маркера), т. е. поочередного права каждо-FO абонента на сеанс обмена данными по шине. Скорость передачи по шине составляет 250 кбит/с.
Шинная система состоит из двух уровней:
ближняя шина CS275N;
дальняя шина CS275F, в том числе средства радиального волоконно-оптического соединения различных сегментов дистанционной шины CS275FO.
Ближняя шина объединяет модули EAS рядом стоящих систем автоматизации. Подключение к дальней шине осуществляется через конвертер UI, устанавливаемый в шкафы ПТК.
Посредством дальней шины объединяются все ближние шины, расположенные в одном помещении средств низовой автоматики. В АСУ ТП энергоблока организован ряд сегментов дальней шины в соответствии с классом управляющих систем по отношению к безопасности и назначением технологических установок.
В проекте АСУ ТП АЭС с ВВЭР-640 все сегменты дистанционной шины соединяются между собой устройствами радиального соединения SK CS275 FO, что обеспечивает обмен сигналами между средствами низовой автоматики, относящимся к разным функциональным областям и размещенным в разных помещениях.
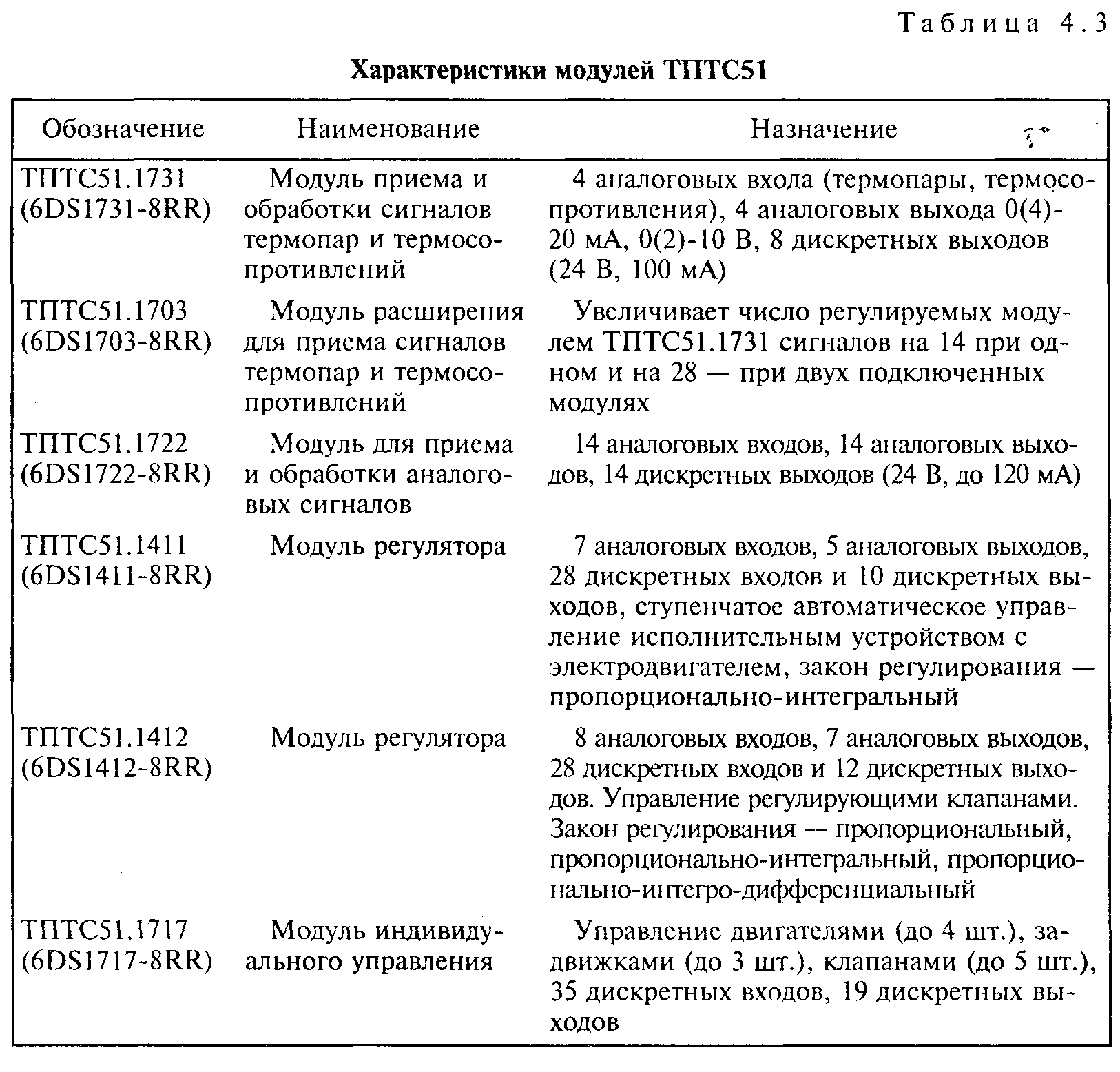
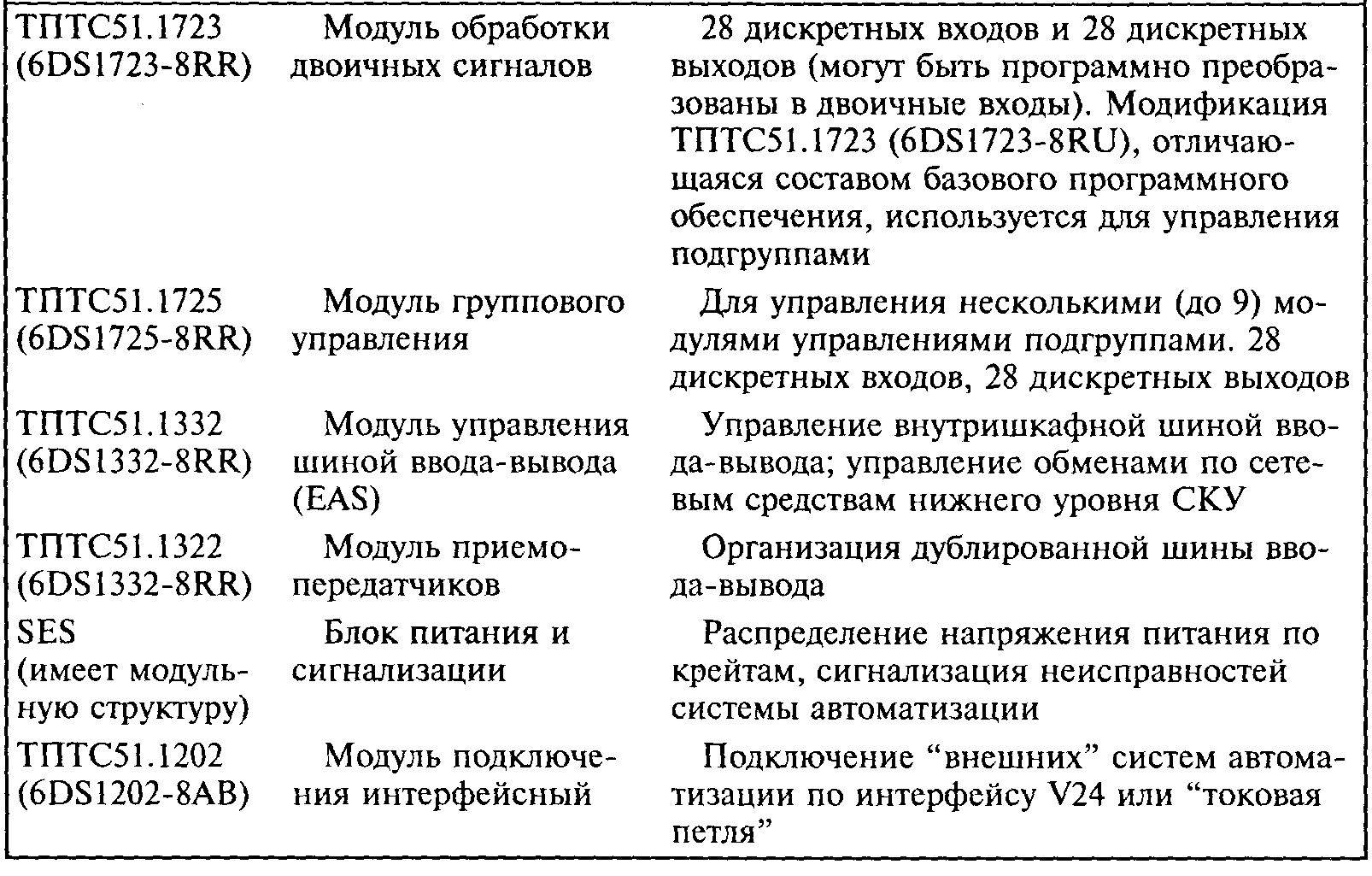


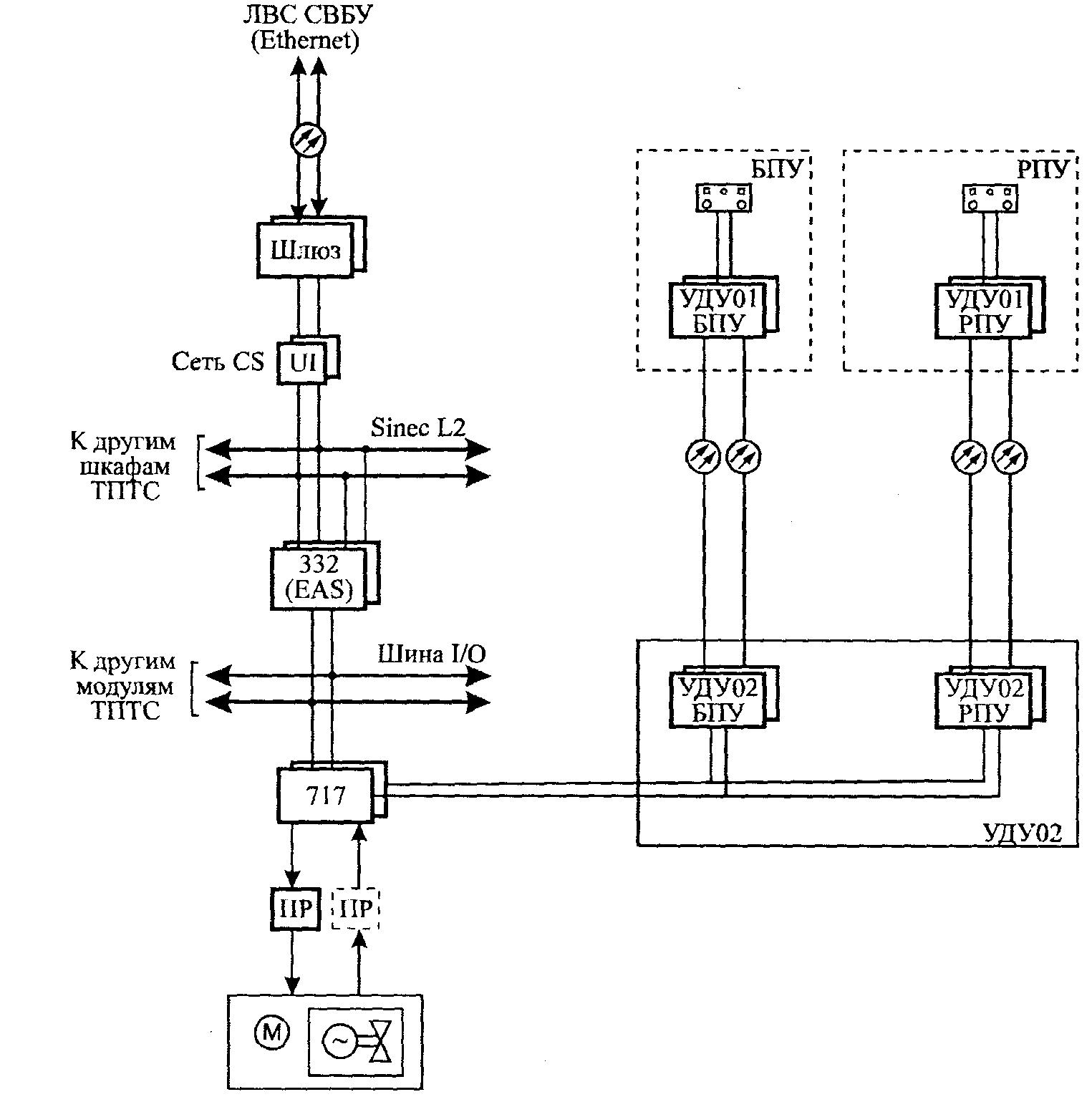
Рис. 4.9. Структурная схема типового канала управления УСНЭ ВБ на базе ТПТС '
Сигналы положения арматуры и состояния исполнительных механизмов после логической обработки в модуле ТПТС51-1717 поступают в модуль EAS и через конвертер UI передаются в СВБУ.
Передача сигналов в функциональные модули от индивидуальных средств управления БПУ и РПУ осуществляется УДУ (УСС).
Для обеспечения заданных показателей надежности модули индивидуального управления ТПТС51-1717 резервируются.
Структурная схема УСНЭ ВБ на средствах ТПТС приведена на рис. 4.10.
Организация УСНЭ на средствах ТПТС подобна организации УСНЭ ВБ, исключая УДУ. Резервированию подлежат только те модули ТПТС51-1717, которые предназначены для управления ответственными механизмами.
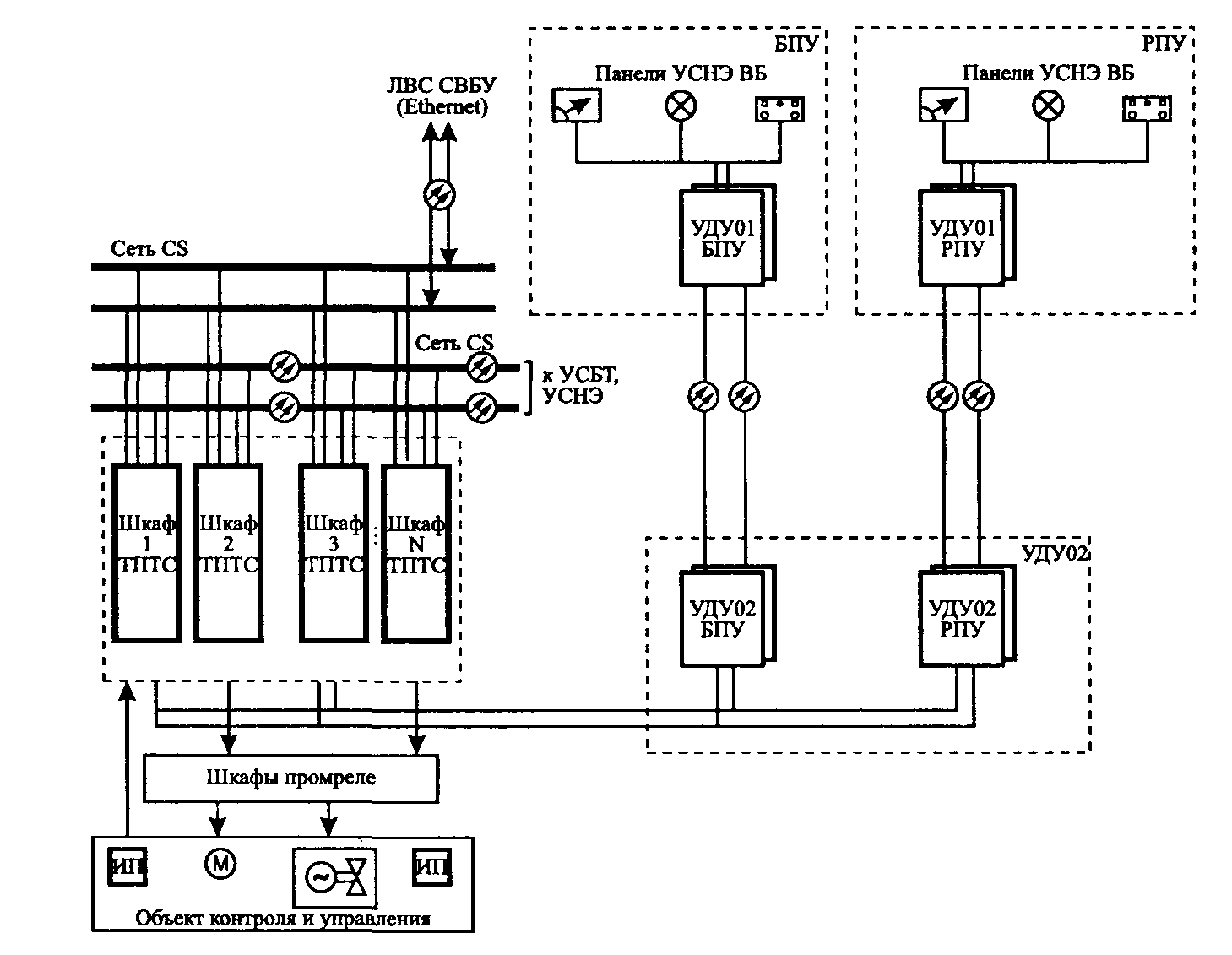
Рис. 4.10. Структура УСНЭ ВБ на базе ТПТС
Управление исполнительными механизмами систем нормальной эксплуатации осуществляется только с дисплейных пультов БПУ.
ПРИНЦИПЫ СОЗДАНИЯ БПУ