

5.1.2. Общая характеристика и классификация основных узлов увм
На рис. 5.1 показана структурная схема АСУ ТП, базирующаяся на УВМ с исполнительными устройствами в виде АСУ ЭП и датчиками, установленными на технологическом оборудовании.
УВМ включает в себя следующие элементы (блоки): блок,запоминающий сведения об объекте и текущие задания, поступающие во внешнюю память с пульта управления; блок сбора и преобразования информации о текущем состоянии объекта и действующих возмущениях; блок центральный — процессор, выполняющий заданные алгоритмом преобразования информации для выработки управляющего воздействия, организующий взаимодействие всех элементов УВМ, и состоящий из арифметического, логического, управляющего и оперативного запоминающего устройств (ОЗУ); блок прямых связей с объектом управления, передающих управляющие воздействия.
УВМ имеют ряд вспомогательных элементов, необходимых для организации процесса управления. К ним относятся средства связи человека с машиной, предназначенные для получения оперативным персоналом информации о ходе технологического процесса, коррекции алгоритма управления и принятия необходимых мер в аварийных ситуациях и средства ввода—вывода информации, включающие различные регистрирующие, индицирующие и запоминающие устройства (перфоленточные, перфокарточные и строкопечатающие, записи на кассеты и гибкие диски), экранные пульты — дисплеи, пишущие машинки, графопостроители.
'На вход УВМ от датчиков поступает текущая информация, в основном аналогового вида (напряжение, ток, частота, угол поворота и т.п.). Так как УВМ оперирует с дискретными величинами, то аналоговые сигналы датчиков необходимо преобразовывать в дискретную форму при помощи аналого-цифровых преобразователей. Однако для управления исполнительными механизмами (управляющими органами) в большинстве случаев необходимы непрерывные сигналы, а УВМ вырабатывает управляющие сигналы в дискретной форме, поэтому необходимо осуществлять их цифро-аналоговое преобразование.
Для уменьшения объема оборудования и стоимости аналого-цифровые (АЦП) и цифро-аналоговые (ЦАП) преобразователи производятся одноканальными, а для поочередного подключения сигналов от каждого датчика к общему АЦП используются коммутаторы.-
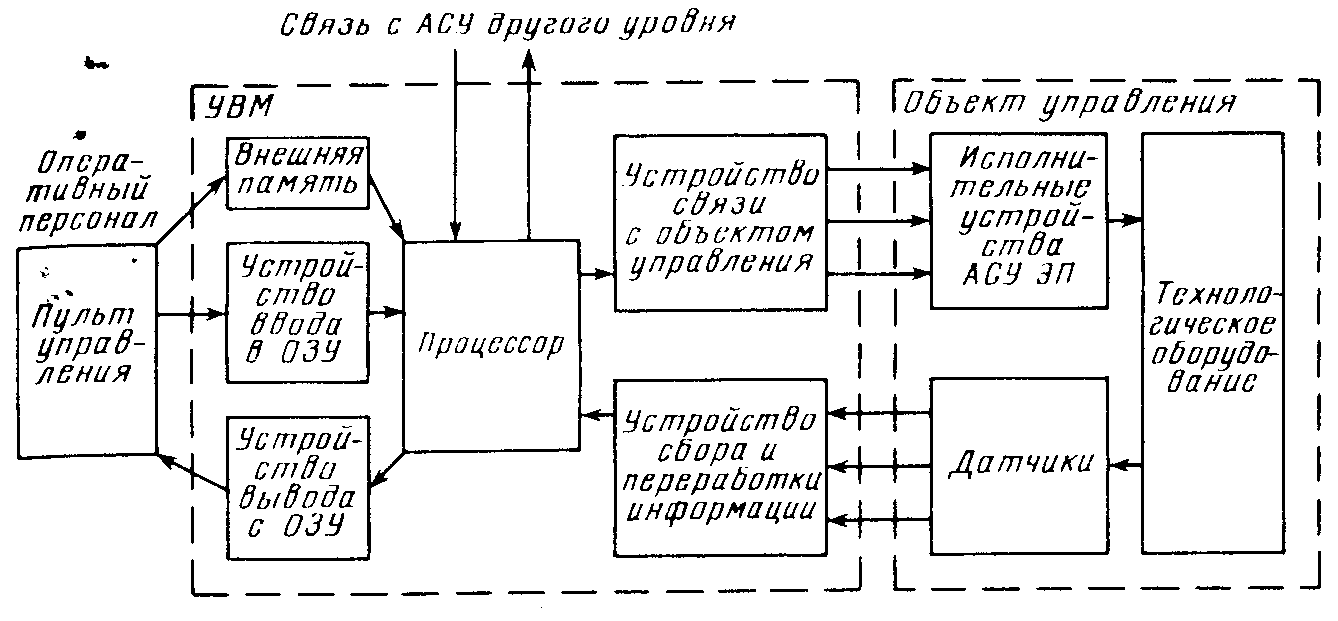
Рис. 5.1. Структура автоматизированного технологического комплекса
5.1.3. Принципы организации связи увм с технологическим объектом управления
В составе АСУ ТП возможны различные принципы построения связи УВМ с объектом управления: синхронный, асинхронный и комбинированный.
При синхронном принципе связи процесс управления разбивается на циклы равной длительности при помощи тактовых импульсов, выдаваемых таймерами. В каждом цикле, начинающемся с приходом тактового импульса на устройство управления, происходят последовательный опрос и преобразование сигналов датчиков в цифровую форму. Эти операции и запоминание преобразованных величин в УВМ должны происходить за интервал времени, в течение которого контролируемые параметры технологического .процесса могут измениться лишь в допустимых пределах.
После поступления очередной партии текущей информации к УВМ и ее запоминания происходит расчет новых значений управляющих воздействий и после их преобразования — передача к исполнительным органам. Закончив расчет управляющих воздействий, УВМ прерывает вычисления до прихода тактового импульса.
Для того чтобы АСУ ТП имела возможность реагировать на события, вызванные отклонением хода технологического процесса от заданного, или аварийные ситуации, используется асинхронный принцип связи УВМ с объектом управления. Такая возможность обеспечивается введением функции прерывания. УВМ реагирует на импульсы прерывания с учетом приоритетного уровня одних сигналов прерывания перед другими. Необходимость ранжирования уровней приоритета вызвана тем, что одни события могут быть более важными, чем другие. Задаче с более высоким приоритетом разрешается останавливать обработку задачи, имеющей приоритет низшего ранга. После завершения обслуживания высокоприоритетного прерывания система возвращается к выполнению прерванной программы.
Возможно применение комбинированного принципа связи УВМ с объектом, при котором наряду с тактовыми импульсами таймера используются сигналы прерывания от датчиков, фиксирующих аварийную ситуацию на объекте. Они переводят УВМ на работу по программе для аварийного режима.