

Розанов учебник(ЭЭА) / GLAVA_11
.pdfГл. 11. Статические коммутационные аппараты и регуляторы постоянного тока
ние напряжения на конденсаторе Cê до значения, большего напряжения E. После спадания тока в индуктивности Lê до нуля включается диод VD2 (момент времени t6) и конденсатор Cê разряжается
до напряжения несколько меньшего, чем входное напряжение E (момент времени t7).
Методика расчета параметров коммутирующего LêCê-контура подробно изложена в [90, 91].
11.1.4. ГИБРИДНЫЕ АППАРАТЫ ПОСТОЯННОГО ТОКА
Гибридными коммутационными аппаратами называются комбинированные аппараты для коммутации цепей постоянного тока посредством как статических, так и электромеханических силовых ключей. Целью такой комбинации является объединение положительных качеств электромехани- ческих и статических аппаратов, а также достижение новых положительных эффектов, улучшающих технико-экономические показатели. Электромеханические ключи позволяют получить низкие значе- ния падения напряжения в проводящем состоянии и хорошую гальваническую развязку в выключенном состоянии. Статические ключи обеспечивают высокое быстродействие и позволяют регулировать параметры электроэнергии в коммутируемой цепи. Положительным результатом гибридной коммутации является также возможность существенного облегчения режима коммутации электромехани- ческих ключей в условиях совместной работы со статическими.
Пример простейшей схемы гибридного аппарата постоянного тока, реализующей быстродействие тиристора, приведен на рис. 11.13. При подаче импульса управления на тиристор происходит практически мгновенное подключение нагрузки Zí к источнику напряжения E. Затем происходит замыкание электромеханических контактов Ê, шунтирующих тиристор. Диаграмма токов приведена на рис. 11.13,á. В момент времени t0 происходит вклю- чение тиристора и через него начинает протекать ток нагрузки Ií, затем в момент времени t1 этот ток переходит в электромеханические контакты, сопротивление которых на несколько порядков меньше, чем прямое сопротивление проводящего тиристора. Такая схема может быть успешно использована для быстрого подключения резервных источников питания постоянного тока, например, аккумуляторной батареи.
Гибридные аппараты различаются по типу статического ключа (транзисторные, тиристорные и др.), а также по способу соединения его с электромеханическими контактами: параллельные, последовательные и параллельно-последовательные [89].
Обычные традиционные тиристоры применяются в гибридных аппаратах постоянного тока редко, так как их выключение требует принудительной коммутации. Поэтому в качестве статических клю-
чей обычно используются полностью управляемые транзисторы или запираемые тиристоры. Рассмотрим более подробно различные способы соединения полностью управляемых статических ключей с электромеханическими.
Параллельное соединение ключей. Включение гибридного контактора в схеме с параллельным соединением транзисторов и электромеханических контакторов (рис. 11.14) происходит в следующей последовательности. В момент времени t1 системой управления ÑÓ формируются сигналы на включе- ние транзистора VT и контактора Ê. Транзистор включается практически мгновенно и через него начинает протекать ток нагрузки ií. В общем случае нагрузка обычно имеет активно-индуктивный характер. Поэтому случае ток ií будет плавно нарас-
Рис. 11.13. Принцип гибридной коммутации: à – принципиальная схема;
á – диаграммы тока; â – временная характеристика дуги
292

§ 11.1. Статические и гибридные коммутационные аппараты постоянного тока
тать по экспоненциальному закону до установившегося значения. С задержкой времени, обусловленной инерционностью электромеханического контактора, в момент времени t2 замыкаются контакторы Ê, шунтируя транзистор VT. В результате ток нагрузки ií переходит в контактор Ê. Далее транзистор VT выключается. Для выключения гибридного контактора необходимо в ÑÓ сформировать сигналы на включение транзистора VT и выключение контактора Ê. При подаче этих сигналов в момент времени t3 транзистор VT оказывается подготовленным к переходу в проводящее состояние, а контактор Ê начинает выключаться. В на- чальный период размыкания контактов, через которые протекает ток нагрузки, на них возникает короткая электрическая дуга. Полярность напряжения на контактах по мере его нарастания, для транзистора VT является прямой, и он переходит в проводящее состояние. В результате ток iVT увеличивается, а ток в контактах контактора iê уменьшается (рис. 11.14,á). С учетом быстродействия транзистора переход тока можно считать практи- чески мгновенным. После завершения перехода тока ií в транзистор контакты контактора Ê продолжают размыкание, но уже в обесточенном состоянии. В результате в контакторе Ê не развивается процесс плазменной дуги и его выключение происходит в облегченном режиме. Если выключе- ние контактора происходит при низком напряжении, равном напряжению на проводящем насыщенном транзисторе, то все процессы коммутации
Рис. 11.14. Гибридный контактор параллельного типа: à – принципиальная схема; á – диаграммы токов
(при включении и выключении) происходят в облегченном для электромеханического контактора режимах. Следствием этого является минимальный электрический износ контактов и, соответственно, увеличение ресурса их работы. Кроме того, отсутствие дугообразования позволяет значительно упростить конструкцию контактора и повысить его экономичность при использовании в условиях гибридного аппарата.
После окончания размыкания контактора Ê
âмомент времени t4 прекращается подача отпирающего импульса от ÑÓ, транзистор VT выключается, и источник E оказывается отключенным от
нагрузки Zí. При активно-индуктивном характере нагрузки ток индуктивной составляющей после выключения транзистора VT протекает через обратный диод VD (ðèñ. 11.14,à). Таким образом в гибридном аппарате с параллельным соединением ключей сохраняются быстродействие при включе- нии, присущее статическим ключам, и низкие потери мощности во включенном состоянии, характерные для электромеханических контактов. Однако эта схема не обеспечивает гальванической развязки между потребителем и нагрузкой и не обеспечивает высокого быстродействия при выключении цепи, что важно для выполнения функций защиты от токовых перегрузок в аварийных режимах работы сети. Эти задачи позволяет решить схема с последовательным соединением ключей.
Последовательное соединение ключей. Схема силовой части аппарата с последовательным соединением транзистора и электромеханического контактора приведена на рис. 11.15,à. Предположим, что
âисходном состоянии гибридный контактор выключен и напряжение источника E приложено к разомкнутым контактам контактора Ê, так как их сопротивление существенно больше сопротивления выключенного транзистора VT. При включе-
нии гибридного контактора в момент времени t1
âÑÓ формируются сигналы на включение контактора Ê и транзистора VT. После срабатывания кон-
тактора Ê в момент времени (t1–t2) к транзистору приложено прямое напряжение и он переходит
âпроводящее состояние в режиме насыщения. При выключении цепи ÑÓ формирует сигналы на выключение транзистора VT и отключение контактора Ê. Благодаря быстродействию первым (в момент
времени t3) выключается транзистор VT и отключа- ет нагрузку Zí от источника напряжения E. Индуктивная составляющая тока нагрузки начинает протекать через обратный диод VD. Затем, в момент
времени t4, размыкаются контакты контактора Ê. Размыкание контактов контактора Ê êàê ïðè âû-
293

Гл. 11. Статические коммутационные аппараты и регуляторы постоянного тока
Рис. 11.15. Гибридный контактор последовательного типа:
à – принципиальная схема; á – диаграммы токов и напряжений
ключении, так и при включении в этой схеме происходит без токовой нагрузки, т. е. на холостом ходу. Дугообразование в электромеханических контактах не возникает, и их электрическая стойкость существенно возрастает.
Из принципа действия схемы гибридного аппарата с последовательным соединением ключей следует, что она позволяет реализовать быстродействие статических ключей при выключении. В то же время эта схема не устраняет потерь мощности во включенном аппарате, обусловленных падением напряжения в статическом ключе, проводящем ток нагрузки. Частично достоинства схем с параллельным и последовательным соединением ключей объединяет схема с параллельно-последовательным соединением ключей.
Параллельно-последовательное соединение клю- чей (рис. 11.16). В этой схеме два электромехани- ческих контакта Ê1 è Ê2: Ê1 подключен параллельно транзистору, а Ê2 – последовательно. Эти контакты могут иметь общий привод, но при этом должна обеспечиваться задержка на размыкание и опережение на включение контакта Ê1 относительно контакта Ê2. Рассмотрим последовательность замыкания и размыкания ключей при вклю- чении и выключении аппарата (рис. 11.16,á).
Предположим, что исходным состоянием гибридного аппарата является состояние ”выключе-
Рис. 11.16. Гибридный контактор параллельно-последовательно- го типа:
à – принципиальная схема; á – диаграммы тока
но”. В момент времени t1 система управления формирует импульсы на включение силовых ключей VT, Ê1 è Ê2. Первым должен включиться контакт Ê2, после чего практически мгновенно переходит
âпроводящее состояние транзистор VT, так как на него подан отпирающий сигнал управления. Затем
âмомент времени t3 замыкаются контакты Ê1,
и ток нагрузки переходит из цепи транзистора в цепь контакта Ê1. На этом включение гибридного аппарата заканчивается.
Выключение аппарата происходит следующим образом. В момент времени t4 формируются сигналы на размыкание контактов Ê1 è Ê2. Сначала начинает размыкаться контакт Ê1, и в момент времени t5 ток переходит в транзистор VT. При этом протекают процессы, аналогичные рассмотренным для схемы с параллельным соединением контактов. После перехода тока нагрузки в транзистор VT в момент времени t6 формируется сигнал на запирание транзистора, и источник напряжения E оказывается отключенным от цепи нагрузки. Индуктивная часть тока нагрузки при этом начинает протекать через обратный диод VD, постепенно спадая до нуля из-за потерь мощности в ее активной составляющей. Затем происходит размыкание контактов Ê2, и схема переходит в исходное выключенное состояние. Схема с параллельно-последовательным со-
294

§ 11.2. Базовые схемы регуляторов постоянного тока
единением силовых ключей объединяет достоинства схем с параллельным и последовательным соединением, кроме одного – быстродействия при
выключении, присущего схеме с последовательным соединением ключей. Это ограничивает область ее использования.
Контрольные вопросы и задачи
1.Какими основными достоинствами и недостатками обладают статические и электромеханические ключи?
2.Как влияют на динамические ВАХ статических ключей реактивные элементы (индуктивности и емкости) коммутируемой цепи?
3.В чем проявляется влияние индуктивностей входных и выходных цепей на выключение электромеханического и статического ключей?
4.Определите время выключения транзисторного реле при следующих условиях (см. рис. 11.6,á): напряжение источника питания E = 24 В, напряжение варистора Uvar = 50 В, входная индуктив-
ность Lâõ = 100 мкГн, активное сопротивление входной цепи равно нулю, по быстродействию транзистор соответствует идеальному ключу. При выключении обратный диод со стороны нагрузки проводит ток нагрузки, обусловленный
ее активно-индуктивным характером.
5.Определите требуемую энергоемкость варистора в схеме на рис. 11.6,á, обеспечивающую выклю- чение транзисторного реле после возникновения КЗ на выходе при следующих условиях: входная индуктивность Lâõ = 50 мкГн, напряжение источ- ника питания E = 110 В, активное сопротивление входной цепи, включающей источник питания, равно нулю, длительность КЗ с момента
возникновения до момента пробоя варистора 100 мкс, ток в индуктивности до возникновения КЗ 10 А.
6.Определите время протекания тока в нагрузке после отключения реле в схеме на рис. 11.6,á при следующих условиях: активное сопротивление нагрузки 1 Ом, последовательно включенная индуктивность нагрузки 10 мГн, статическая
ВАХ обратного диода в проводящем состоянии аппроксимируется источником напряжения ∆ U = 2 В, ток нагрузки в конце интервала отключения 100 А.
7.Изобразите диаграммы формирования сигналов в гибридных контакторах: при последовательном, параллельном и параллельно-последова- тельном соединении ключей.
8.Какие факторы определяют время задержки для размыкания контактов Ê2 относительно контактов Ê1 в схеме на рис. 11.16?
9.Объясните процесс перехода тока при выключе- нии гибридного аппарата из электромеханических контактов в параллельно подключенный транзистор и перечислите основные факторы, влияющие на этот процесс.
10.Перечислите основные достоинства и недостатки электромеханических, статических и гибридных коммутационных аппаратов.
11.2.БАЗОВЫЕ СХЕМЫ РЕГУЛЯТОРОВ ПОСТОЯННОГО ТОКА
11.2.1.ОБЩИЕ СВЕДЕНИЯ О БАЗОВЫХ СХЕМАХ
Регуляторы постоянного тока предназначены для регулирования по определенному закону или поддержания неизменности (стабилизации) напряжения или тока в системах электропитания постоянного тока. Регуляторы, осуществляющие только стабилизацию параметров, называются стабилизаторами. Регуляторы могут выполнять и другие функции, например, согласование уровней напряжений или обеспечение гальванической развязки. Выполнение таких функций определяется возможностями конкретной схемы регулятора.
На выходное напряжение или ток регулятора влияют различные факторы: изменение входного напряжения, тока нагрузки, температуры окружающей среды и др. Поскольку эти факторы вызывают изменение выходного напряжения, их называют
возмущающими. Точность поддержания напряжения при воздействии различных возмущающих факторов характеризуется соответствующими параметрами стабилизации. Различают оценку качества стабилизации в статических и динамических режимах работы регулятора. В статических (установившихся) режимах работы качество стабилизации выходных параметров принято оценивать следующими показателями:
Стабильность выходного при изменениях входного напряжения характеризуется коэффициентом стабилизации по напряжению (KñòU)U, который определяется:
(K |
) |
U |
= |
∆ Uâõ |
⁄ |
(∆ Uâûõ)U |
, |
(11.13) |
|
|
|||||||
|
ñòU |
|
Uâõ |
|
Uâûõ |
|
||
|
|
|
|
|
|
|||
295

Гл. 11. Статические коммутационные аппараты и регуляторы постоянного тока
ãäå Uâõ, Uâûõ – установившиеся значения входного и выходного напряжений; ∆ Uâõ è (∆ Uâûõ)U – отклонения входного и выходного напряжений.
Следует отметить, что в устройствах постоянного тока, как правило, рассматриваются средние значения напряжений, так как коэффициент
(KñòU)U в общем случае зависит от Uâõ è Uâûõ, то его значения определяют для конкретного режима работы (как правило, номинального), т. е. в (11.13) подставляют номинальные значения Uâõ è Uâûõ.
Влияние на выходное напряжение нагрузки учи- тывается внутренним (выходным) сопротивлением
регулятора Râí:
R = |
(∆ Uâûõ)I |
, |
(11.14) |
âí |
∆ Iâûõ |
|
ãäå (∆ Uâûõ)I – отклонение выходного напряжения, вызванное изменением нагрузки ∆ Iâûõ.
Значение Râí, определенное по (11.14), в стати- ческих режимах называют статическим внутренним сопротивлением.
Сопротивление Râí зависит от режима работы. Его определяют для конкретных значений нагрузки и выходного напряжения, обычно равным номинальному. В общем случае это сопротивление является нелинейным.
Отклонение выходного напряжения, вызванное изменением температуры элементов регулятора, характеризуют коэффициентом стабилизации напряжения по температуре (Kñò)T, измеряемом при неизменных значениях входного напряжения и тока нагрузки:
(K |
) |
T |
= |
(∆ Uâûõ)T |
, |
(11.15) |
|
||||||
|
ñò |
|
∆ T |
|
|
|
|
|
|
|
|
|
ãäå (∆ Uâûõ)T – отклонение выходного напряжения, вызванное изменением температуры; ∆ T – изменение температуры окружающей среды (в установившемся тепловом режиме это соответствует изменению температуры элементов регулятора).
Важным показателем качества электропитания на постоянном токе является коэффициент пульсаций выходного напряжения Kï, определяемый обобщенным выражением
K = |
U~ |
, |
(11.16) |
ï Uâûõ
ãäå U~ – переменная составляющая выходного напряжения (пульсация); Uâûõ – установившееся (обыч- но номинальное) значение выходного напряжения.
Уровень пульсации U~ по различным методикам оценивается по-разному. Наиболее распространенными являются следующие определения U~:
действующее значение переменной составляю-
ùåé (U~)ä;
разность максимального и минимального мгно-
венных значений выходного напряжения Umax − Umin;
2
амплитуда первой гармоники переменной составляющей Um1.
Иногда среди показателей качества используют показатели частотного спектра пульсаций.
Для оценки качества регулирования в динами- ческих режимах используют обычно классические методы теории автоматического регулирования [91]. Основными возмущающими факторами в динами- ческих режимах регуляторов постоянного тока принято считать скачкообразное изменение входного напряжения или тока нагрузки. Среди основных показателей качества в этих режимах следует отметить следующие:
максимальное ∆ Umax и минимальное ∆ Umin зна- чения отклонения выходного напряжения в переходных режимах;
длительность переходного процесса tn, рассчи-
тываемая как время от момента начала переходного процесса до момента вхождения в зону допустимого отклонения выходного напряжения в статическом режиме.
При более детальном анализе учитываются такие показатели как запас устойчивости регулятора, показатель колебательности переходного процесса и др.
Оценка качества регулирования чаще всего проводится на основе частотных методов теории автоматического регулирования, которые хорошо согласуются с экспериментальными [91].
Следует отметить, что на практике динамические свойства регуляторов иногда оцениваются внутренним динамическим или дифференциальным сопротивлением. Оно определяется аналогично статическому по (11.14), но при малых отклонениях тока нагрузки в широком частотном диапазоне. При таком определении внутреннее сопротивление является частотнозависимым и, по существу, является частотной характеристикой, связывающей (в линеаризованном приближении) выходное напряжение с нагрузкой.
По принципу действия регуляторы постоянного тока разделяются на непрерывные и импульсные. Основное внимание в этом разделе уделено более перспективным одноключевым схемам с импульсным регулированием. На базе этих схем обычно реализуются функции регулирования в коммутационных и защитных статических аппаратах. Эти схемы также успешно используются в других видах электрических аппаратов, предназначенных для управления электромагнитными устройствами, электромеханическим приводом и др.
296

§11.2. Базовые схемы регуляторов постоянного тока
11.2.2.РЕГУЛЯТОРЫ-СТАБИЛИЗАТОРЫ НЕПРЕРЫВНОГО ДЕЙСТВИЯ
Большинство регуляторов-стабилизаторов по принципу действия могут быть разделены на две группы: параметрические (разомкнутые) и с обратной связью (замкнутые). Последние могут быть непрерывного и дискретного (импульсного) действия.
Параметрические стабилизаторы. Параметри- ческие стабилизаторы напряжения являются наиболее простыми стабилизирующими устройствами, широко применяемыми в микроэлектронике. Особенно большое распространение они получили в различного рода электронных устройствах для стабилизации напряжений питания отдельных функциональных узлов схемы.
В основе принципа действия параметрических стабилизаторов напряжения лежит использование нелинейности некоторых полупроводниковых приборов: стабилитронов, диодов и прочих, вольт-ам- перная характеристика которых обладает большой крутизной. На рис. (11.17,a) представлена простейшая схема однокаскадного параметрического стабилизатора, выполненного на стабилитроне VD. Резистор rá является балластным сопротивлением, ограничивающим ток в стабилитроне и воспринимающим избыток напряжения источника питания. На рис. 11.17,á показаны вольт-амперные характеристики стабилитрона 1 и нагрузки 2 (проведена под углом α í = arctgRí). Суммируя их ординаты, получают зависимость 3 входного тока Iâõ от выходного напряжения Uâûõ. На том же графике представлено зеркальное отображение вольт-ам- перной характеристики балластного сопротивления [прямая 4, пересекающая ось абсцисс в точке, соответствующей входному напряжению E, и проведенная под углом α á = arctg(rá)]. Штриховой линией на рис. 11.17,á показано изменение положений прямой 4, вызванное отклонениями входного напряжения ∆ E. При этом изменение выходного напряжения ∆ Uâûõ будет значительно меньше из-за нелинейности кривой 3.
Приближенно коэффициент стабилизации в данной схеме определяется
KñòU ≈ (ráUâûõ) ⁄ RäE , |
(11.17) |
ãäå Rä – динамическое сопротивление стабилитрона. Для обеспечения нормального режима стабилизации необходимо, чтобы ток в стабилитроне на-
ходился в диапазоне Iñò min ≤ Iñò ≤ Iñò max, ãäå Iñò min è Iñò max – допустимые значения токов стабилитрона.
Транзисторные регуляторы с обратной связью.
Принцип действия регуляторов с непрерывным регулированием основан на зависимости вольт-ам-
Рис. 11.17. Параметрический стабилизатор напряжения:
à – принципиальная схема; á – ВАХ стабилитрона и нагрузки
перной характеристики транзистора от базового тока. Благодаря этому свойству транзистор можно рассматривать как резистор с регулируемым сопротивлением, которое определяется током базы. В качестве регулируемого сопротивления транзистор (или группа транзисторов) может быть включен последовательно или параллельно с нагрузкой (рис. 11.18) и выполнять функции основного исполнительного органа в регулировании (стабилизации) выходного напряжения. В схеме на рис. 11.18,a при увеличении входного напряжения сигнал, поступающий на базу транзистора VT от системы управления стабилизатора, увеличивает сопротивление между коллектором и эмиттером транзистора до такого значения, пока падение напряжения на транзисторе ∆ UCE не станет равным (с точностью, обусловленной в основном схемой СУ) изменению входного напряжения ∆ E. При уменьшении E сопротивление транзистора уменьшается, и соответственно уменьшается падение напряжения на нем. Таким образом, регулируя падение напряжения на транзисторе, можно стабилизировать выходное напряжение.
В схеме на рис. 11.18,á транзистор VT включен параллельно нагрузке, и дополнительно введено балластное сопротивление rá. Стабилизация выход-
297

Гл. 11. Статические коммутационные аппараты и регуляторы постоянного тока
ного напряжения осуществляется за счет перераспределения входного напряжения E между сопротивлениями rá è rCE (сопротивление между коллектором и эмиттером транзистора VT) при регулировании rCE системой управления стабилизатора. При увеличении входного напряжения E уменьшается сопротивление rCE, а падение напряжения на сопротивлении rá увеличивается; при уменьшении входного напряжения происходит обратный процесс. Регулирование падения напряжения на rá позволяет стабилизировать выходное напряжение.
В качестве основного регулирующего элемента обычно используют мощные силовые транзисторы, которые соединяются параллельно в количестве, определяемом мощностью регулятора. В настоящее время регуляторы подобного типа выполняются, как правило, на мощности от долей ватта до нескольких десятков ватт.
Системы управления регуляторов могут иметь различные схемные исполнения, но в основе обыч- но лежит принцип регулирования систем с замкнутой обратной связью. Такая система в самом общем виде состоит (рис. 11.18,â) из датчика выходного напряжения 1, сравнивающего устройства 2 и усилителя постоянного тока 3. Принцип регулирования заключается в следующем. Предположим, что входное напряжение стабилизатора изменилось на ∆ E. В результате изменяется выходное напряжение стабилизатора ∆ Uâûõ и регистрируется датчиком выходного напряжения 1. Напряжение Uä с датчика 1 поступает в устройство 2, где сравнивается с эталонным напряжением U0. Разность этих напряже-
íèé ε поступает в усилитель 3, который усиливает это напряжение до ∆ Uð. С выхода усилителя напряжение ∆ Uð подается непосредственно (или через согласующее устройство) на исполнительный орган 4, в качестве которого, как уже отмечалось, используются силовые транзисторы. Действительное зна- чение выходного напряжения будет несколько отличаться от установленного значения. Эта разность зависит от коэффициента усиления цепи обратной связи (в основном звена 3). Поскольку при регулировании происходит сравнение выходного и эталонного напряжений, как в приборах для точного измерения напряжения – компенсаторах, стабилизаторы подобного типа иногда называют компенсационными. (Исторически сложилось, что под компенсационным стабилизатором обычно понимают стабилизатор непрерывного действия. В то же время этот принцип регулирования лежит в основе и других типов стабилизаторов, например импульсных).
Рис. 11.18. Транзисторные регуляторы непрерывного действия: à – последовательного типа; á – параллельного типа; â – общая структурная схема компенсационного регулятора напряжения
Рис. 11.19. Транзисторный регулятор напряжения компенсационного типа
В простейшей схеме компенсационного стабилизатора (рис. 11.19) функции усилительного и сравнивающего звеньев выполняет транзистор VT2, в ка- честве датчика используется делитель из сопротивлений R1 è R2, а опорное напряжение U0 задается стабилитроном VD. Коэффициент стабилизации выходного напряжения такого регулятора приближенно определяется
KñòU ≈ |
1 + |
U0 |
β 2 |
|
1 |
|
|
, (11.18) |
|
U |
âõ |
|
R |
R |
|||||
|
|
|
|
Râõ + |
|
1 |
2 |
|
|
|
|
|
|
|
R1 |
+ |
R2 |
||
|
|
|
|
|
|
||||
298
§ 11.2. Базовые схемы регуляторов постоянного тока
ãäå U0 – опорное напряжение стабилитрона VD; Râõ è β 2 – входное сопротивление и коэффициент усиления по току транзистора VT2.
Существует много модификаций схем рассмотренного типа, различающихся в основном системой управления, числом транзисторов усилительного звена и использованием в схеме дополнительных источников питания элементов системы управления.
На основе рассмотренных принципов регулирования могут быть также созданы стабилизаторы тока. В схемах стабилизаторов тока вместо датчика
напряжения вводится датчик выходного тока (или тока нагрузки), который контролирует отклонение последнего от заданного значения.
Компенсационные стабилизаторы непрерывного действия могут обеспечить высокий коэффициент стабилизации напряжения (или тока). Кроме того, они по принципу действия снижают пульсации выходного напряжения, являясь одновременно фильтром для переменной составляющей. Существенным их недостатком является низкий КПД и, как следствие этого, плохие массогабаритные показатели.
11.2.3. ТИПОВЫЕ СТРУКТУРЫ УПРАВЛЕНИЯ ИМПУЛЬСНЫМИ РЕГУЛЯТОРАМИ
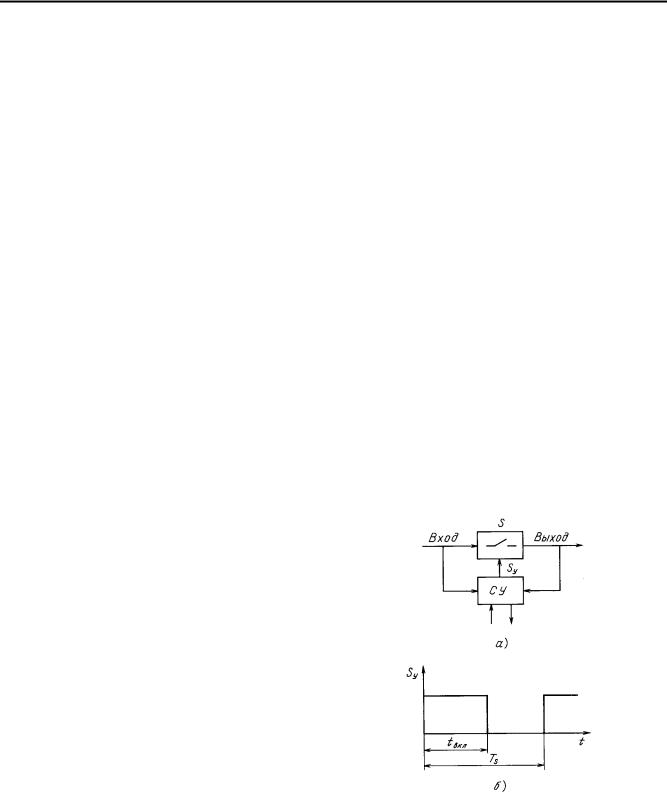
Общие принципы импульсного регулирования рассмотрены в § 9.2, где указаны основные способы импульсной модуляции напряжения или тока. Наибольшее распространение в классе импульсных регуляторов постоянного тока получили широтноимпульсная модуляция (ШИМ), частотно-им- пульсная (ЧИМ) и релейная. Рассмотрим более подробно структуру систем управления, реализующих эти способы, на примере обобщенной схемы импульсного регулятора (рис. 11.20,à). Характер регулятора обусловлен наличием обобщенного коммутатора S, который может быть выполнен на основе одного или более синхронно коммутируемых ключей, управляемых СУ, связанной в общем случае с входными и выходными параметрами, а также внешней средой. Для упрощения будем считать, что коммутатор содержит один полностью управляемый ключ S.
При регулировании по способу ШИМ ключ S периодически включается с частотой fS = 1 ⁄ TS и находится в проводящем состоянии время tâêë, равное γ TS, а остальную часть периода tâûêë ключ находится в выключенном состоянии (рис. 11.20,á), ò. å.
tâûêë = TS − tâêë . |
(11.19) |
Коэффициент γ называется коэффициентом за- |
|
полнения, а величину обратную ему q = |
1 ⁄ γ , принято |
называть скважностью. Коэффициент γ может изменяться от 0 до 1. Наиболее распространенным способом импульсного регулирования γ является ШИМ. Существует много различных способов ее реализации. Наиболее простая, распространенная структура выполняется по принципу вертикального управления. На рис. 11.21,à представлен вариант такой структурной схемы. В этой схеме сигнал Xâûõ поступает на вход компаратора Êîì1, где сравнивается с эталонным сигналом X0. В качестве сигнала Xâûõ обычно используется выходной сиг-
нал, снимаемый датчиком, например, среднего зна- чения напряжения или тока на выходе регулятора. Разность сигналов ∆ X = X0 − Xâûõ усиливается усилителем Ó. Обычно усилитель содержит элементы, позволяющие корректировать его передаточную функцию Wg (S ) и, следовательно, качество регу-
лирования в целом. Выходной сигнал усилителя ε поступает на компаратор Êîì2, где сравнивается с сигналом пилообразной формы Uãïí. Этот сигнал формируется генераторами тактовых импульсов ÃÒÈ и пилообразного напряжения ÃÏÍ. Генератор ÃÒÈ задает рабочую частоту fð переключения ключа
S. Разность сигналов ε è Uãïí с выхода компаратора Êîì2 поступает на формирователь импульсов ÔÈ, на выходе которого формируются импульсы управления Us ключом S. Длительность импульса Uóïð
Рис. 11.20. Принцип действия ключевого регулятора постоянного напряжения:
à – общая схема; á – диаграмма сигнала управления
299

Гл. 11. Статические коммутационные аппараты и регуляторы постоянного тока
Рис. 11.21. Принцип широтно-импульсной модуляции: à – структурная схема; á – диаграммы напряжений
Рис. 11.22. Принцип частотно-импульсной модуляции: à – структурная схема; á – диаграмма напряжения
определяется сигналами Uãïí è ε (ðèñ. 11.21,á).
Соответственно при изменении сигнала ε изменяется длительность включенного состояния tâêë ключа S на интервале периода Ts, т. е. изменяется коэффициент заполнения γ при управлении клю- чом по способу ШИМ. Предположим, что регулятор настроен на работу с отрицательным статизмом при воздействии возмущающих факторов. В этом
Рис. 11.23. Принцип релейной модуляции:
à – структурная схема; á – диаграммы напряжения и сигнала управления
случае при отсутствии возмущений настройка обеспечивает минимальное значение ошибки ε min, т. е. минимальное отклонение регулируемой величины Xâûõ от заданного эталонного значения X0. Коэффициент заполнения γ в этом режиме также минимален. С возрастанием влияния возмущающих факторов сигнал Xâûõ начинает уменьшаться, а сиг-
íàëû ε и коэффициент γ будут увеличиваться, компенсируя воздействие возмущений.
При регулировании по способу ЧИМ регулирующим фактором является рабочая частота коммутации ключей импульсного регулятора. Упрощенная структурная схема регулятора с ЧИМ представлена на рис. 11.22. В этой схеме отклонение контролируемого параметра Xâûõ от эталонного значения X0 поступает на усилитель Ó. Выходной сигнал усилителя ∆ X определяет частоту fs сигналов генератора переменной частоты ÃÏ×. Формирователь импульсов ÔÈ согласует параметры импульсов ÃÏ× с параметрами импульсов управления коммутатором S. Ïðè ×ÈÌ изменение частоты ∆ fs приводит к изменению коэф-
фициента заполнения γ = tâêë ⁄ T = tâêëfs, так как длительность импульса ts на выходе ÔÈ является посто-
янной величиной, а относительные значения времени включенного (или выключенного) состояния (рис. 11.22,б) зависят от ∆ fs, ò. å.
∆γ = tâêë∆ fs . |
(11.20) |
300

§ 11.2. Базовые схемы регуляторов постоянного тока
Отдельно следует отметить релейный способ регулирования, который в общем случае может рассматриваться как сочетание широтно- и частотно-им- пульсного управления. На рис. 11.23 представлены упрощенная структурная схема, реализующая этот способ, и диаграммы, иллюстрирующие процессы в регуляторе. Регулируемый параметр Xâûõ сравнивается с эталонным сигналом X0 и разность этих
сигналов ∆ X, через усилитель Ó, поступает на релейный гистерезисный элемент РЭ, имеющий два явно выраженных состояния Ó+ è Ó− . Пороговые значения, при которых происходит переключение по гистерезисной петле, соответствуют ± ∆ Xñð. Выходным сигналам РЭ Ó+ è Ó− соответствуют сигна-
лы на выходе ÔÈ, определяющие включенное или выключенное состояние ключа S импульсного регулятора. Одно из состояний вызывает увеличение регулируемого параметра, а другое его уменьшение (рис. 11.23,á). Скорость этих процессов зависит от инерционности всех звеньев регулятора, включая собственно объект регулирования. Если параметры
схемы, влияющие на скорость протекания процессов, изменяются, например, при изменении нагрузки, то соответственно, изменяется и рабочая частота переключений fs. Также может изменяться
и коэффициент заполнения γ . Точность регулирования в этой схеме определяется пороговыми зна- чениями срабатывания ∆ Xñð релейного элемента.
Способ релейного регулирования находит широкое применение в системах ”слежения” за эталонным сигналом, при изменении его во времени, т. е. контролируемый параметр является переменной величиной. В таких системах рабочая частота fs должна существенно, более чем на порядок, пре-
вышать основную частоту изменения сигнала X0(t). Пульсации регулируемого параметра, обусловленные переключением ключей S на частоте fs, отфильтровываются выходным фильтром регулятора. С ростом частоты fs параметры выходного фильтра уменьшаются, что приводит к улучшению удельных массогабаритных показателей регулятора в целом.
11.2.4. ИМПУЛЬСНЫЙ РЕГУЛЯТОР С ПОСЛЕДОВАТЕЛЬНЫМ КЛЮЧОМ
Этот тип регулятора называется понижающим, так как его выходное напряжение не может превышать входное. Рассмотрим принцип действия регулятора в схеме с активной нагрузкой Rí (ðèñ. 11.24,à). Периодическая коммутация полностью управляемого ключа S с частотой fs = 1 ⁄ Ts вызывает появление на нагрузке импульсного однополярного напряжения (рис. 11.24,á). Среднее значение выходного напряжения на нагрузке Uí.ñð зависит от соотношения времени включенного tâêë и выклю- ченного tâûêë состояний и определяется
|
|
Ts |
|
|
|
Uí.ñð = |
1 |
∫Uí(t)dt = |
Etâêë |
= Eγ , (11.21) |
|
Ts |
T |
||||
|
0 |
|
|||
|
|
|
|
где γ – относительное значение коэффициента заполнения (в данном случае относительная длительность включенного состояния ключа S).
Из (11.21) видно, что изменяя величину γ , можно регулировать среднее значение выходного напряжения от 0 до E. Способы изменения γ могут быть различными, но наибольшее распространение для этого класса схем получил принцип регулирования на основе ШИМ.
Импульсное регулирование вызывает значительную пульсацию выходного напряжения. Поэтому на выходе регулятора для уменьшения пульсаций, как правило, включают фильтр. Для рассматриваемой схемы наиболее эффективным и распростра-
ненным является Ã-образный LC-фильтр. На рис. 11.25 представлена силовая часть схемы регулятора с LC-фильтром, транзисторным ключом VT и обратным диодом VD. Последний создает цепь протекания тока iL при выключении транзистора VT. При отсутствии диода VD будут возникать недопустимые перенапряжения на транзисторе при его выключении, обусловленные возникновением противоЭДС e = − LdiL ⁄ dt в индуктивности фильтра.
Рис. 11.24. Принцип действия последовательного ключевого регулятора:
à – схема; á – диаграмма напряжения
301