

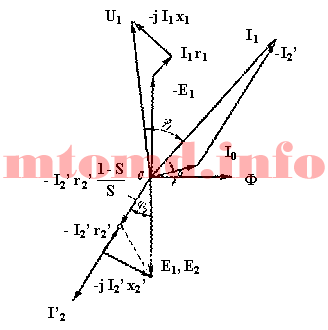
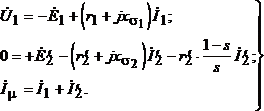
30. Уравнение и векторная диаграмма асинхронного двигателя Векторная диаграмма асинхронного двигателя
33. Рабочие характеристики асинхронных двигателей
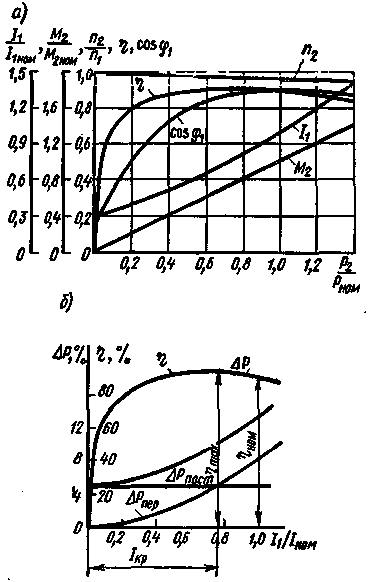
Рабочими характеристиками называют графические зависимости частоты вращения п2 (или скольжения s),момента на валу М2 , тока статора I1 , коэффициента полезного действия η и cos φ1от полезной мощности Р2 при U1 = const и f1 = const. Их определяют экспериментально или путем расчета по схеме замещения или круговой диаграмме.
Примерный вид рабочих характеристик асинхронного двигателя показан на рис. 4.25. Частота вращения, ток статора, момент на валу, потребляемая и полезная мощности приведены на графике в относительных единицах. Рабочие характеристики строят только для зоны практически устойчивой работы двигателя, т. е. до скольжения (1,1 ÷ l,2)sном .
36.Зависимость вращающего момента от скольжения.
Из
последнего выражения видно, что вращающий
момент асинхронного двигателя зависит
от скольжения.
На фиг. 224 изображена
кривая А зависимости вращающего момента
двигателя от скольжения. Из кривой
видно, что в момент пуска, когда s=l и n =
0, вращающий момент двигателя невелик.
Это объясняется тем, что в момент пуска
частота тока в обмотке ротора наибольшая
и индуктивное сопротивление обмотки
велико. Вследствие этого cos ![]() имеет
малое значение (по-
имеет
малое значение (по-
|
|
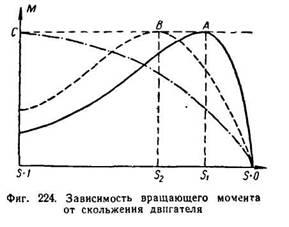
При некотором скольжении S1 вращающий момент двигателя будет иметь максимальное значение. При дальнейшем уменьшении скольжения или, иначе говоря, при даль, нейшем увеличении скорости вращения двигателя его момент будет быстро умень-
шаться и при скольжении s = 0 момент вращения двигателя бу- • дет также равен нулю.
Следует оговориться, что у асинхронного двигателя скольжение, равное нулю, практически быть не может. Это возможно лишь в том случае, если ротору сообщить извне вращающий момент в сторону вращения поля статора.
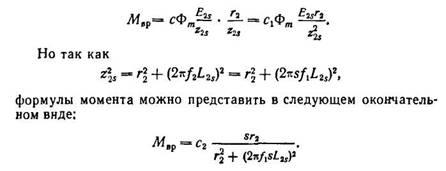
Пусковой момент можно увеличить, если в момент пуска уменьшить сдвиг фаз между током и э. д. с. ротора. Из формулы
![]()
видно,
что если при постоянном индуктивном
сопротивлении обмотки ротора увеличить
активное сопротивление, то ![]() и
сам угол
и
сам угол ![]() будут
уменьшаться, что приведет к тому, что
будут
уменьшаться, что приведет к тому, что ![]() и
вращающий момент двигателя станут
больше. Этим пользуются на практике для
увеличения пускового вращающего момента
двигателя. В момент пуска в цепь ротора
вводят активное сопротивление (пусковой
реостат), которое затем выводят, как
только двигатель увеличит
скорость.
Увеличение пускового
момента приводит к тому, что максимальный
вращающий момент двигателя получается
при большем скольжении (точка S2 кривой
B на фиг. 224). Путем увеличения активного
сопротивления цепи ротора при пуске
можно добиться того, что максимальный
вращающий момент будет в момент пуска
(s = 1 кривой С).
Вращающий момент
асинхронного двигателя пропорционален
квадрату напряжения, поэтому даже
небольшое уменьшение напряжения
сопровождается резким уменьшением
вращающего момента.
и
вращающий момент двигателя станут
больше. Этим пользуются на практике для
увеличения пускового вращающего момента
двигателя. В момент пуска в цепь ротора
вводят активное сопротивление (пусковой
реостат), которое затем выводят, как
только двигатель увеличит
скорость.
Увеличение пускового
момента приводит к тому, что максимальный
вращающий момент двигателя получается
при большем скольжении (точка S2 кривой
B на фиг. 224). Путем увеличения активного
сопротивления цепи ротора при пуске
можно добиться того, что максимальный
вращающий момент будет в момент пуска
(s = 1 кривой С).
Вращающий момент
асинхронного двигателя пропорционален
квадрату напряжения, поэтому даже
небольшое уменьшение напряжения
сопровождается резким уменьшением
вращающего момента.