

Гайдес М.А. - Общая теория систем. (Системы и системный анализ)
.docЧем проще система, тем труднее выделить в нём привычные для нас формы блока управления. Но он есть в любых системах. Элементы исполнения отвечают за качество результата действия, а блок управления – за его количество. Блоком управления могут быть, например, внутри- или межатомные и межмолекулярные связи. Так в атоме функции СФЕ выполняют электроны, протоны и нейтроны, а блок управления – внутриядерные силы, или, как ещё говорят, взаимодействия.
Внутриатомной уставкой, например, является условие, что на первом электронном уровне может быть не более 2 электронов, на втором – 8 электронов и т.д. (периодический закон, определяемый принципом Паули), причём этот уровень жестко задан квантовыми числами. Если электрон каким-то образом получил добавочную энергию и поднялся выше своего уровня, то он не сможет её долго удерживать и опустится обратно, испустив излишек энергии в виде фотона. Но не любая энергия может поднять электрон на другой уровень, а только и только определённая (соответствующий квант энергии). И поднимается он не на любой уровень, а только на строго заданный, определяемый величиной принятого кванта энергии. Если энергия внешнего воздействия будет меньше соответствующего кванта, система стабилизации уровня электрона будет удерживать его на прежней орбите (в прежнем состоянии) до тех пор, пока энергия внешнего воздействия не превысит соответствующий уровень. Если же энергия внешнего воздействия будет всё время линейно нарастать, то электрон будет подниматься с уровня на уровень не линейно, а перескакивать скачками, которые строго определены квантовыми законами, на всё более высокие орбиты, как только энергия воздействия превысит определённые пороговые уровни. Число уровней орбиты электрона в атоме, вероятно, очень большое и равно числу спектральных линий соответствующего атома, но каждый уровень строго фиксирован и определён квантовыми законами. Следовательно, какой-то механизм (система стабилизации квантовых уровней) строго следит за выполнением этих законов, и у этого механизма должны быть свои СФЕ и блоки управления. Число уровней орбиты электрона, вероятно, определяется числом внутриядерных СФЕ (протонов и нейтронов или же других элементарных частиц) и их взаимодействием, результатом действия которых является положение электрона на электронной орбите.
Даже у гвоздя, несмотря на его простоту, есть блок управления, содержащий ППС и ООС, которые работают в соответствии с выше описанным алгоритмом. Нам трудно найти в нём какое-то образование, которое выполняет функции блока управления, но мы видим эти функции (управления) по конечному результату. У гвоздя уставкой являются его форма и геометрические размеры. Эта уставка вводится в блок управления однократно в момент изготовления гвоздя, когда отмеряются его размеры (в момент его «рождения»), и больше уже не вводится. Но когда уставка уже введена, то система должна выполнять эту уставку, т.е., гвоздь должен держать форму и размеры, даже если по нему бьют молотком. Причём мера его противодействия (его реакция) в ответ на сгибание в точности равна величине внешнего воздействия. Если его противодействие будет больше, чем сила сгибания, то он прогнётся в сторону противоположную силе сгибания. Если меньше, то он просто согнётся. Но гвоздь «умудряется» держать свою форму с той или иной точностью в довольно больших пределах изгибающей его силы. Следовательно, блок управления гвоздя справляется со своей задачей.
В любых типах блока управления в какой-то момент должна быть введена уставка тем или иным образом. Мы не можем изготовить гвоздь «вообще», а только конкретной формы и заданных размеров. Поэтому, в момент его изготовления (т.е., однократно) мы «задаём» ему задание быть такой-то формы и размеров.
Уставка может меняться, если есть канал ввода уставки. Например, при включении кондиционера воздуха, мы можем «задать» ему держать температуру воздуха 20°С, а затем поменять уставку на 25°С. У гвоздя нет канала ввода уставки, а у кондиционера есть.
У простого блока управления есть три канала управления – один внешний (уставка) и два внутренних (ППС и ООС). Он реагирует на внешнее воздействие через ППС (информатор «Х») и на собственный результат действия системы (информатор «У») через ООС, а через эфферентные пути управляет исполнительными элементами системы.
Аналогом систем с простым блоком управления являются все объекты неживого мира – газовые облака, кристаллы, различные твёрдые тела, планеты, планетарные и звёздные системы и т.д.
Биологическим аналогом систем с простым блоком управления являются одно- и многоклеточные растения, бактерии и все вегетативные системы организма, включая, например, систему внешнего газообмена, систему кровообращения, систему обмена метаболических газов, систему пищеварения или иммунную систему.
Одноклеточные животные организмы типа амёб и инфузорий, низшие классы животных (медузы и пр.) являются системами с уже сложными блоками управления (см. далее).
Все вегетативные и многие двигательные рефлексы высших животных, срабатывающие на всех уровнях, начиная с интрамуральных нервных ганглиев и вплоть до гипоталамуса, построены по типу простых блоков управления. Если же на них оказывается управляющее влияние коры головного мозга, то появляются рефлексы более высокого типа – сложные рефлексы (см. далее).
Аналогом рецепторов «Х» анализатора-контактора в животном мире являются все чувствительные рецепторы (хемо-, баро-, термо- и прочие рецепторы, расположенные в различных органах, кроме зрительных, слуховых и обонятельных рецепторов, которые входят в состав информатора «С», см. далее).
Аналогом анализатора-контактора или анализатора-эффектора в минеральном и растительном мирах являются только связи между элементами по типу прямого соединения рецепторов «X» и «У» с эффекторами (аксон-рефлексы). В вегетативных системах животных – также по типу прямого соединения рецепторов «X» и «У» с эффекторами (гуморальная и метаболическая регуляция), по типу аксон-рефлекса (управляют только веточки нерва без участия самой нервной клетки) и по типу безусловных рефлексов (на уровне внутриорганных интрамуральных и других нейронных образований вплоть до гипоталамуса).
Аналогом рецепторов анализатора-эффектора «У» являются все проприо-чувствительные рецепторы, которые также могут быть хемо-, баро-, термо- и прочими рецепторами, расположенные в различных органах.
Аналогом стимуляторов блока управления являются все двигательные и эффекторные нервы, стимулирующие поперечно-полосатую, гладкомышечную мускулатуру и секреторные клетки, а также гормоны, простагландины и прочие метаболиты, оказывающие какое-либо влияние на метаболизм и функцию каких-либо систем организма.
Так работает простой блок управления. Используя ППС и ООС и регулируя число активных СФЕ система продуцирует свои результаты действия, качественно и количественно соответствующие заданной цели.
Выводы:
-
система с простым блоком управления является объектом, который может реагировать на определённое внешнее воздействие, и, как и СФЕ, давать результат действия определённого качества, но в отличие от СФЕ, результат действия системы градуированный, стабильный и точный, потому, что блок управления контролирует его с помощью ООС и может регулировать его количество
реакция системы обусловлена типом и числом её СФЕ.
число градаций результата действия определяется числом СФЕ в системе, а точность – квантом действия одиночной СФЕ и глубиной ОСС
стабильность результата действия определяется глубиной ООС
2. управление начинается только после появления внешнего воздействия и/или результата действия.
-
тип управления – по рассогласованию
Циклы системы и переходные процессы.
У систем, как и у СФЕ, также есть циклы их деятельности. Любые системы, как неживые, так и живые, подчиняются циклическим законам их управления и все они работают в полном и обязательном подчинении этим циклам. Поэтому без знания циклов работы системы невозможно понять функции любых систем живого организма.
Нарушения ритмов сокращения миокарда, нарушения сна или дыхания во сне, нарушения в пищеварительной системе и многие другие нарушения различных функций организма обусловлены нарушением синхронности циклов взаимодействующих систем организма.

Рис. 12. Полный цикл действия простого блока управления.
Цикл построен по алгоритму, указанному на рис. 11. Верхняя кривая – внешнее воздействие, нижняя – график функции системы. 1, 2, 3 – микроциклы системы.
a – внешнее воздействие, на которое система начинает реагировать; b – внешнее воздействие, на которое система не реагирует, потому что находится в рефрактерном состоянии (не может активировать свои СФЕ, потому что не измеряет Х); с – длительное внешнее воздействие, на которое система реагирует (пунктиром показана реакция системы, если бы длительность внешнего воздействия была по прежнему короткой); d – переходный мультицикл системы (амплитуда паразитных колебаний зависит от глубины ООС); е – установившееся значение функции; f – заданное значение результата действия системы; g – полный цикл действия системы.
1 – восприятие и селекция внешнего воздействия рецептором «X» после начала внешнего воздействия; 2 – сравнение «X» с «базой данных» и определение числа активных СФЕ; 3 - мультимикроцикл ООС; 4 – время установившегося целевого уровня функции; 5 – прекращение функции.
У разных систем могут быть разные циклы деятельности и они зависят от сложности и алгоритма блока управления. Самый простой цикл работы у системы с простым блоком управления (рис. 12).
Он складывается из микроциклов:
-
восприятие, селекция и измерение внешнего воздействия рецептором «X»
-
выбор из «базы данных» величины должного значения результата действия
-
переходный процесс (мультимикроцикл ООС, получение должного результата действия)
α. восприятие и измерение результата действия рецептором «Y»
β. сравнение этого результата с должной величиной
γ. переход к 1-му микроциклу, если он равен должному
δ. выработка решения и соответствующего воздействия на СФЕ с целью коррекции результата действия, если результат действия не равен должному
ε. воздействие на СФЕ
ζ. срабатывание СФЕ
η. возврат к «α»
После начала внешнего воздействия срабатывает рецептор «X» (1-й микроцикл). Затем из «базы данных» выбирается то значение результата действия, которое должно соответствовать данному внешнему воздействию (2-й микроцикл). После этого начинается переходный процесс (переходный период, 3-й мультимикроцикл, цикл ООС): срабатывание рецептора «Y», сравнение результата действия с должной величиной, выбранной в «базе данных», корректирующее воздействие на СФЕ (включаются то число СФЕ, которое определил блок управления в микроцикле «δ» в соответствии с глубиной ООС) и снова возврат к срабатыванию рецептора «Y» (к микроциклу «α»). И так до тех пор, пока результат действия не будет равным данному. С этого момента цель достигнута и после этого блок управления возвращается к 1-му микроциклу, к рецепции внешнего воздействия. Деятельность же системы для выработки результата действия прекращается до тех пор, пока не появится новое внешнее воздействие.
Наиболее длительный переходный период тогда, когда глубина ООС максимальная. Например, если «У» меньше чем уставка «М», то в микроцикле переходного периода ООС включает только одну СФЕ, и так до тех пор, пока «У» не будет равно уставке «М», после чего переходный период заканчивается. Но так как СФЕ много и они включаются в функцию последовательно, то на это затрачивается очень много времени. Но зато функция системы очень плавно и без дополнительных колебаний приближается к должной величине.
Если глубина ООС меньше максимальной, то в микроцикле переходного периода ООС включает несколько СФЕ, причём, чем меньше глубина ООС, тем больше число СФЕ за один микроцикл включается в действие. При этом, чем больше число включаемых СФЕ за один микроцикл переходного периода, тем короче его длительность. При приближении «У» к заданному уставкой «М» ООС в какой-то момент «промахивается» и «У» становится больше чем уставка «М». После этого ООС стремится уменьшить «У» и в какой-то момент опять «промахивается» и «У» опять становится меньше чем уставка «М». И так до тех пор, пока «У» не станет равным уставке «М». Эти «промахивания» о определяют амплитуду колебаний кривой функции системы (управление по типу последовательного приближения).
Следовательно, максимально глубокая ООС лишена колебаний функции в переходном периоде, но зато сама его длительность максимально большая. Неглубокая ООС укорачивает деятельность переходного периода, но создаёт колебания функции. Поэтому всегда нужно выбирать из двух зол наименьшее. Если длительность переходного периода не имеет значения, то нужно выбирать наибольшую глубину ООС. Наградой за это будет наиболее «гладкая» кривая функции системы. Если необходимо увеличить быстродействие системы, это можно сделать путём укорочения длительности переходного периода за счёт неглубокой ООС, «заплатив» за это гармониками колебаний функции системы.
К выше сказанному следует добавить очень существенное дополнение. При рассмотрении циклов срабатывания СФЕ уже указывалось, что после срабатывания любой СФЕ она полностью расходует свой запаса энергии, предназначенный для производства действия. Поэтому после завершения действия СФЕ не способна совершать новое действие до тех пор, пока она не восстановит свой энергетический потенциал, а на это уходит дополнительное время, которое может существенно увеличить длительность переходного периода. Поэтому у спортсмена, у которого система доставки кислорода в ткани велика (большая скорость поставки энергии), скорость движения тела, например, бега, также велика. А у сердечного больного скорость движения тела низкая, потому что скорость поставки энергии снижена из-за поражения системы кровообращения, которая входит в состав системы энергоснабжения организма. У больных много времени уходит на восстановление энергетического потенциала мышечных клеток из-за замедленной поставки О2.
Микроциклы с 1-го по 2-й составляют стартовый период работы блока управления. Если было короткое внешнее воздействие, блок управления определяет его во время стартового цикла и переходит к переходному периоду (d на рис. 12), во время которого стремится получить актуальный результат действия, равный должному. Если во время переходного периода снова появится внешнее воздействие (b на рис. 12), то блок управления не прореагирует на него, потому что в этот момент он занят измерением «У» и не измеряет «Х» (рефрактерная фаза). По окончании переходного периода блок управления вновь обращается к стартовому периоду, но пока он это делает (обращается), достигнутое должное значение результата действия сохраняется неизменным (установившийся период).
Если внешнее воздействие будет равно нулю, то все СФЕ дезактивируются, потому что нулевому внешнему воздействию соответствует нулевая активация СФЕ, и система перестаёт действовать.
Если спустя некоторое время появится новое внешнее воздействие, то система повторит всё в прежнем порядке.
Если внешнее воздействие достаточно длительно и не меняется, так что после первого достижения цели блок управления успевает вновь обратиться к рецепции «Х», то установившееся значение результата действия будет сохраняться до тех пор, пока будет продолжаться внешнее воздействие. При этом переходного цикла не возникнет, потому что установившееся значение результата действия равно должному.
Если внешнее воздействие будет продолжаться и менять свою амплитуду, то возможно появление нового переходного цикла. Причём амплитуда колебаний функции будет тем больше, чем больше изменение амплитуды внешнего воздействия, потому что будет срабатывать механизм «промахивания мимо цели». Поэтому резкие перепады амплитуды внешнего воздействия недопустимы, потому что они вызывают различны нежелательные эффекты, связанные с переходным периодом рис. 13).

Рис. 13. График функции системы при меняющемся уровне внешнего воздействия.
При каждом изменении уровня внешнего воздействия возникают переходные процессы. Переход функции на новый уровень становится возможным лишь после того, когда система готова это сделать.
На длительность цикла работы системы также существенное влияние оказывают процессы восстановления энергетического потенциала сработавших СФЕ. Каждая СФЕ при своём срабатывании расходует определённое (квантованное) количество своей энергии, которая либо привносится самим внешним воздействием, либо накапливается заранее какими-либо подсистемами энергоснабжения данной системы (см. далее). В любом случае восстановление энергетического потенциала также требует времени, но эти процессы мы не рассматриваем, потому что они касаются только элементов исполнения (СФЕ), а мы рассматриваем только процессы, происходящие в блоках управления систем.
Так система постоянно циклически работает, выполняя свои микроциклы. Если нет внешнего воздействия или оно не меняется, то система находится на одном из своих стационарных уровней в одном и том же функциональном состоянии с одним и тем же числом функционирующих СФЕ, от нуля до всех. В таком режиме у неё нет переходного мультимикроцикла (многократного повтора 3-го микроцикла).
У разных систем подобные микроциклы могут отличаться в деталях, но у всех без исключения систем есть переходный мультимикроцикл ООС и это является её существенным недостатком. Выраженность переходных процессов зависит от очень многих факторов. Она может быть от минимальной до максимальной, но переходные процессы всегда есть у всех систем в той или иной степени выраженности. Они неустранимы принципиально, потому что ОСС срабатывает уже после появления результата действия системы. Пока аффекторы системы почувствуют рассогласование, пока блок управления примет соответствующее решение, пока эффекторы исполнят это решение, пока ООС измерит результат действия и подправит решение, и пока этот процесс не повторится несколько раз до тех пор, пока не будет получено нужное соотношение «...внешнее воздействие → результат действия...», пройдёт некоторое время. Поэтому в это время могут возникнуть всякие неожидаемые нелинейные переходные процессы, нарушающие нормальный режим работы системы. Поэтому при первом «включении» системы в действие или при резкой смене нагрузки ей нужен достаточно длительный период установления. И даже в установившемся режиме из-за различных случайных флюктуаций внешней среды может быть небольшой сбой в работе ООС и могут появляться небольшие переходные процессы («шум» результата действия реальной системы).
Наличие переходных процессов накладывает определённые ограничения на работу и область использования систем. Медленные инерционные системы не подходят для быстрых внешних воздействий, потому что быстродействие систем в первую очередь определяется быстродействием петли ООС. Да, быстродействие исполнительных элементов является основой быстродействия системы в целом, но мультимикроцикл ООС вносит свою существенную долю в удлинение цикла работы системы. Поэтому при выборе нагрузок на живой организм необходимо учитывать быстродействие системы и подбирать скорость нарастания нагрузок таким образом, чтобы выраженность переходных процессов была наименьшей.
 А
В
С
А
В
С
Рис. 14. Переходные процессы.
Переходный процесс – это процесс перехода с одного уровня функционального состояния на другой. Чем «мельче» ступеньки перехода с одного уровня на другой, тем меньше амплитуда переходных процессов (А и В). При плавном изменении нагрузки нет переходных процессов (С).
Чем медленнее меняется внешнее воздействие, тем меньше переходный процесс (рис. 14). При достаточно медленном изменении внешнего воздействия переходный период становится практически незаметным. Следовательно, если внешнее воздействие меняется, то в зависимости от скорости этого изменения и от быстродействия элементов системы длительность переходного периода может быть от нуля до максимально возможного.
Выраженность переходных процессов зависит от калибра СФЕ, силы внешнего воздействия, от времени зарядки энергией СФЕ, от чувствительности рецепторов, от времени их срабатывания, от глубины ОСС и от алгоритма работы блока управления. Но эти циклы работы систем и переходные процессы есть и внутри атомов, и в электронных схемах, и в планетарных системах, и во всех остальных системах, наполняющих наш Мир, включая организм человека.
Если бы у систем не было переходных процессов, то время переходного периода всегда было бы равно нулю и системы были бы абсолютно безынерционными. Но таких систем нет и любой системе присуща инерционность в той или иной степени. Например, в электронике наличие переходных процессов порождает дополнительные гармоники колебаний электрического тока в различных усилителях или генераторах тока. Для их подавления применяются изощренные схемные решения, но они всегда есть в любых электронных приборах, хотя и значительно подавленные.
Постоянная времени систем с простыми блоками управления включает постоянные времени каждой СФЕ плюс непостоянные длительности переходных периодов ООС. Поэтому постоянная времени таких систем не совсем постоянная, потому что длительности переходных периодов ООС могут меняться в зависимости от силы внешнего воздействия.
Переходные процессы в системах с простыми блоками управления увеличивают инерционность таких систем. А это приводит к различным фазовым нарушениям синхронизации и баланса взаимодействия между системами. Бороться с переходными процессами можно очень многими способами. Можно фильтровать внешние воздействия таким образом, что бы не было резких ударных воздействий (фильтрация, принцип постепенности нагрузки). Если заранее знать характер внешних воздействий, предвидеть их, для чего нужно их сначала увидеть, что под силу как минимум только сложным блокам управления (см. далее), то можно построить такой соответствующий алгоритм работы блока управления, чтобы 3-й микроцикл сразу нашел верное решение (управление по упреждению). Но это посильно только лишь интеллектуальным блокам управления. Полностью избавиться от инерционности систем, нам пока, видимо, не удаётся.
Поэтому если внешнее воздействие не меняется и переходные процессы практически равны нулю, то система циклически и ровно работает на одном из своих стационарных уровней. Или гладко переходит с одного стационарного уровня на другой, если внешнее воздействие меняется, но достаточно медленно. Если переходные процессы становятся ощутимыми, то циклы работы системы становятся неравными из-за появления переходных мультимикроциклов – времени переходных процессов. Нелинейные эффекты при этом снижают эффективность работы системы.
В нашей обыденной жизни мы часто сталкиваемся с переходными процессами, когда, например, совершенно неподготовленные выходим из тёплой комнаты на холод и получаем простуду. В тёплой комнате все системы нашего организма были в определённом балансе своих взаимодействий и всё было нормально. Но вот мы вышли на резкий холод и все системы должны сразу же перестроиться на новый баланс. Если они не успевают это сделать, если возникают слишком сильные переходные процессы, при которых появляются неожидаемые флюктуации результатов действий систем организма, то возникает дисбаланс взаимодействий систем, который мы называем простудой (здесь мы не уточняем частности, связанные с изменением состояния иммунной системы). Спустя некоторое время дисбаланс ликвидируется и простуда проходит. Если мы будем закаляться, то сможем научить наши «блоки управления» предвидеть резкие удары внешних воздействий, чтобы уменьшить переходные процессы, тогда мы сможем даже купаться в ледяной воде.
Особое значение для нас имеют переходные процессы, возникающие при резкой смене ситуации вокруг нас. Стресс-синдром прямо связан с этим явлением. Чем резче меняется ситуация вокруг нас, чем она более угрожающая (чем сильнее внешнее воздействие), тем резче переходные процессы, вплоть до парадоксальных реакций типа ступора. При этом возникает дисбаланс работы различных участков нервной системы (блоков управления), который приводит к дисбалансу работы различных систем организма и появлению различных патологических процессов (типа вегетоневрозов и депрессий) и реакций, в основном сосудистых, типа ишемий, из-за которых возникают язвы, начиная с ротовой полости (афты) и до толстого кишечника (язвы желудка и 12-ти перстной кишки, язвенные колиты и т.д.), а также артериальной гипертонии, инфарктов и пр. (синдром Селье).
Цикличность – это свойство систем не только живого организма. Любая система работает циклически. Если внешнее воздействие сохраняется на стабильном уровне, то работает этот минимальный установившийся цикл работы системы. Но и внешнее воздействие также может меняться циклически, например, от сна ко сну, от обеда до обеда и т.д. Это уже вторичные, третичные и т.д. циклы. Если построить графики функций системы, то получим волнообразные кривые, характеризующие цикличность. Примерами этому могут быть кривые пневмотахограммы, электрокардиограммы, кривые изменения кислотности желудочного сока, сфигмограммы, кривые электрической активности нейронов, периодичность альфа-ритма ЭЭГ и т.д.
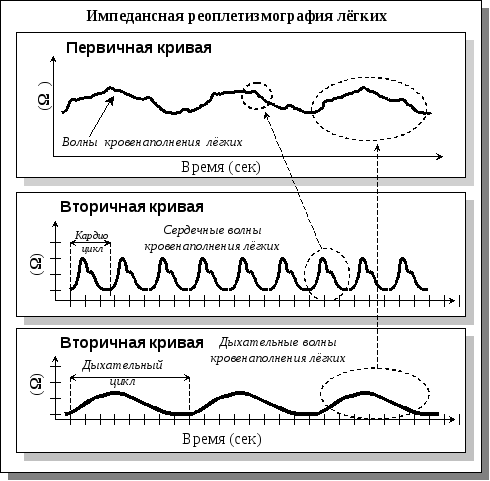
Рис. 15. Кривая импедансной реоплетизмографии лёгких в модификации тетраполярной реоплетизмографии по Кубичеку. Дыхательные и сердечные волны (циклы) кровенаполнения лёгких.
Верхний график – полная импедансная реоплетизмограмма лёгких, состоит из суммы волн сердечных и дыхательных циклов (обведены пунктирными кружками). Средний график – кардиоциклы, после фильтра нижних частот, срезающих низкочастотные дыхательные волны. Нижний график – дыхательные волны, после фильтра верхних частот, срезающего высокочастотные кардиоволны.
Волны на море, смена времён года, движения планет, движения поездов и т.д., всё это примеры цикличности различных систем. Формы кривой цикличности могут самыми разнообразными. Кривая ЭКГ отличается от кривой артериального давления, и кривая артериального давления отличается от кривой давления в левом желудочке. Число форм кривых безгранично.
Три основных параметра характеризуют цикличность – период (или обратная периоду величина – частота), неравномерность периода, и число гармоник частоты. У СФЕ (простейшая система) не должно быть неравномерности периода цикла, её циклы действия всегда одинаковы. Но у систем уже есть переходные периоды, у которых может быть различное время цикла. Кроме того, различные системы имеют собственные периоды цикла и при их взаимодействии происходит интерференция (наложение) периодов. Поэтому появляются дополнительные смещения собственных периодов систем, появляются гармоники циклов.